Изобретение относится к подъемным устройствам, в частности к ручным грузоподъемным талям с бесконечной приводной цепью.
Цель изобретения - упрощение конструкции тали.
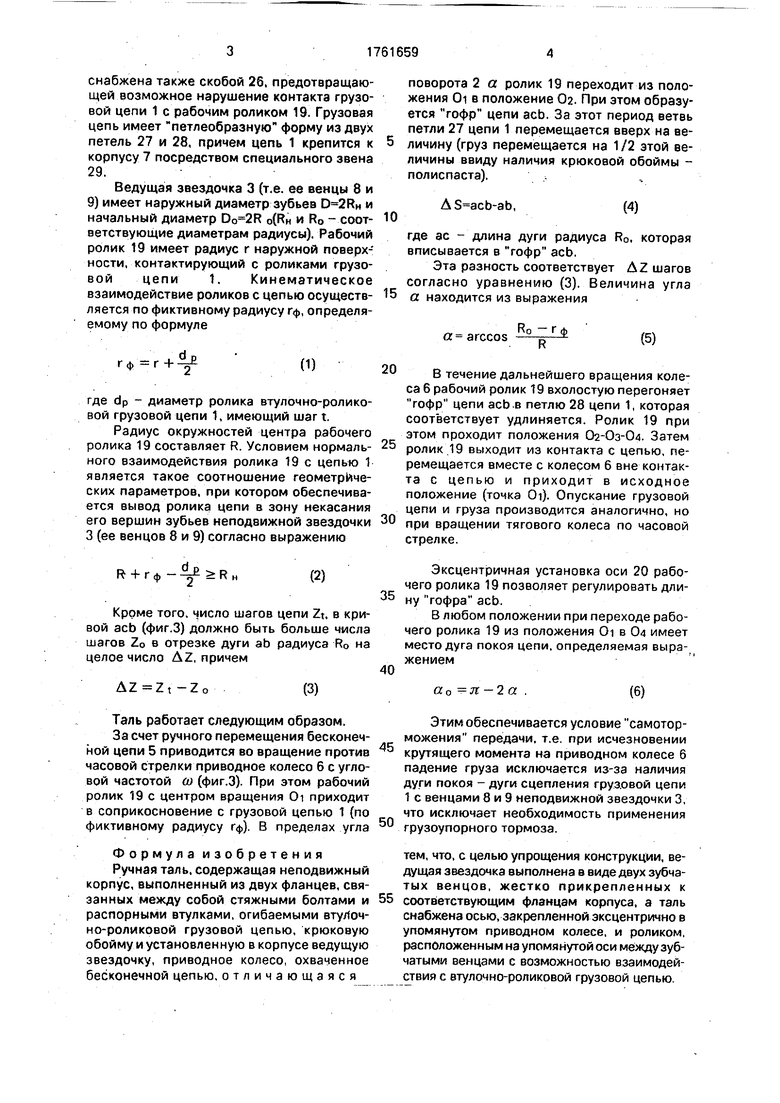
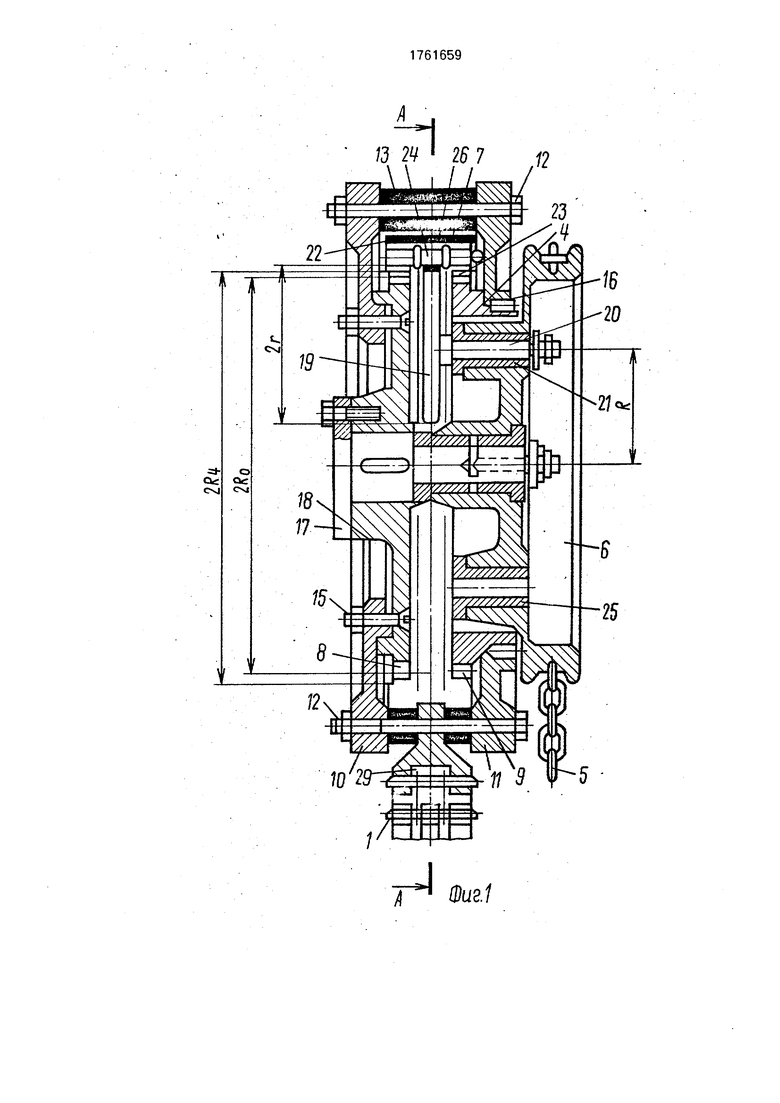
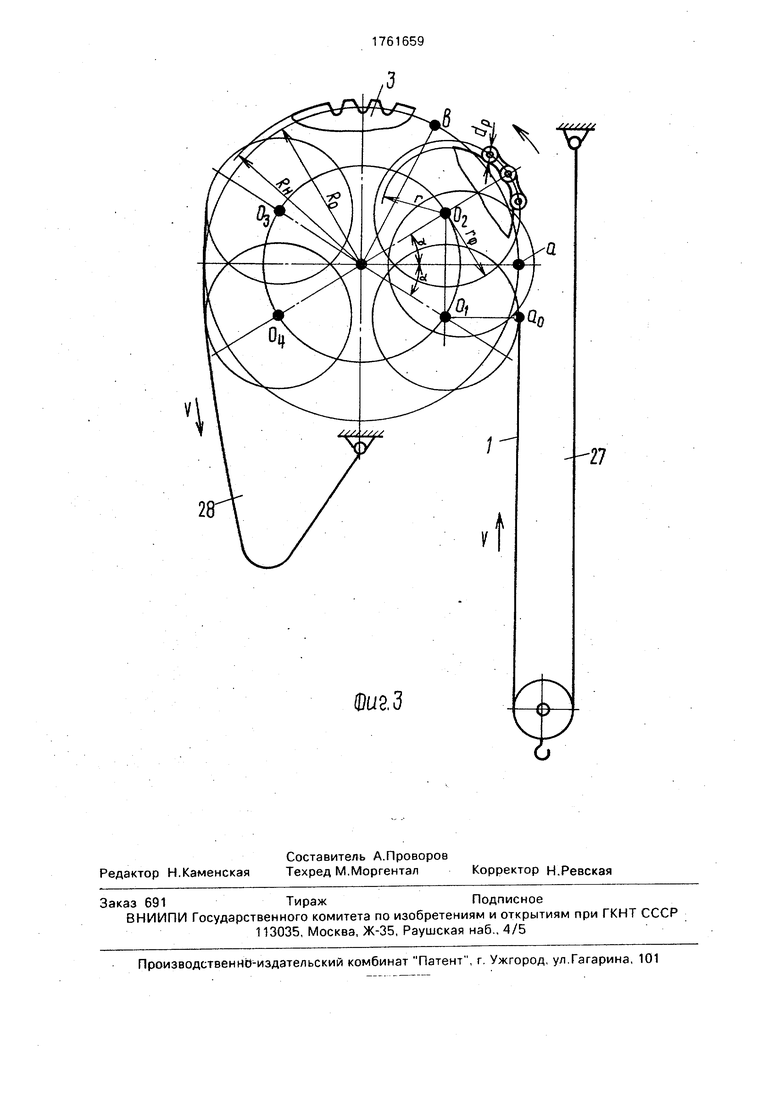
На фиг.1 изображена ручная таль, разрез; на фиг.2 - разрез А-А на фиг. 1; на фиг.З - принципиальная схема работы приводного устройства тали.
Таль содержит втулочно-ролико- вую грузовую цепь 1 с крюковой обоймой 2, огибающую ведущую звездочку 3, приводное устройство 4, связанное с несущим бесконечную круглозвенную цепь 5 приводным колесом 6, объединенными неподвижным корпусом 7, Ведущая звездочка 3 образована зубчатыми венцами 8 и 9 с фланцами 10 и 11, которые зафиксированы стяжными болтами 12 и поперечными распорными втулками 13, образуя корпус 7, снабженный
крюком 14 для подвески тали Зубчатый венец 8 соединен с фланцем 10 стяжными болтами 15 а венец 9 - с фланцем 11 винтами 16
Приводное колесо б свободно установлено на оси 17, жестко закрепленной в ступице 18 зубчатого венца 8 звездочки 3.
Колесо 6 несет бесконечную круглозвенную цепь 5. Приводное устройство 4 представляет собой ролик 19, ось 20 которого размещена эксцентрично во вкладыше 21 расточки колеса 6. Грузовая цепь 1 имеет стандартную втулочно-роликовую конструкцию и содержит, например, 3 ряда: два крайних 22, 23 и средний 24 Крайние ряды 22 и 23 находятся во взаимодействии с зубчатыми венцами 8 и 9, а средний ряд - с рабочим роликом 19. Колесо 6 имеет дополнительное гнездо с вкладышем 25 для возможной установки второго рабочего ролика для увеличения средней скорости подъема груза. Таль
ю
С
VJ
О
ел ю
снабжена также скобой 26, предотвращающей возможное нарушение контакта грузовой цепи 1 с рабочим роликом 19. Грузовая цепь имеет петлеобразную форму из двух петель 27 и 28, причем цепь 1 крепится к корпусу 7 посредством специального звена 29.
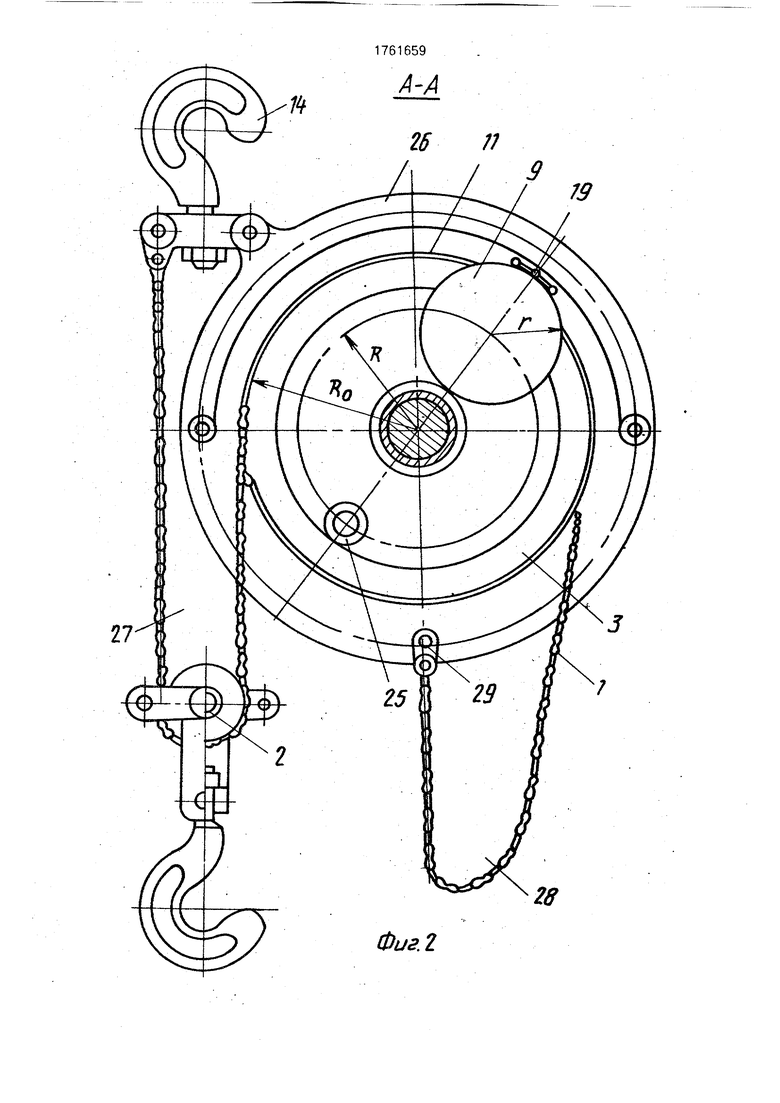
Ведущая звездочка 3 (т.е. ее венцы 8 и 9) имеет наружный диаметр зубьев и начальный диаметр 0(Rn и R0 - соответствующие диаметрам радиусы). Рабочий ролик 19 имеет радиус г наружной поверхности, контактирующий с роликами грузовой цепи 1. Кинематическое взаимодействие роликов с цепью осуществляется по фиктивному радиусу Гф, определяемому по формуле
поворота 2 а ролик 19 переходит из положения Oi в положение 02. При этом образуется гофр цепи acb. За этот период ветвь петли 27 цепи 1 перемещается вверх на ве- личину (груз перемещается на 1 /2 этой величины ввиду наличия крюковой обоймы - полиспаста).
10
Л S acb-ab,
(4)
где ас - длина дуги радиуса R0, которая вписывается в гофр acb.
Эта разность соответствует AZ шагов согласно уравнению (3). Величина угла а находится из выражения
а arccos
RO - Гф R
(5)
| название | год | авторы | номер документа |
|---|---|---|---|
| Цепная таль | 1990 |
|
SU1772077A1 |
| ТАЛЬ ПНЕВМАТИЧЕСКАЯ | 2002 |
|
RU2208572C1 |
| Ручная цепная таль | 1986 |
|
SU1409582A1 |
| Цепная таль | 1985 |
|
SU1248950A1 |
| Конвейерная система | 1985 |
|
SU1283171A1 |
| РУЧНАЯ БОРТОВАЯ ТАЛЬ | 1991 |
|
RU2016836C1 |
| Механизм подачи горной машины | 1983 |
|
SU1094961A1 |
| Ручная шестеренная цепная таль | 1971 |
|
SU405307A1 |
| Волновая ременная передача | 1979 |
|
SU898183A1 |
| ВЕЛОСИПЕД РЕЕЧНЫЙ | 1996 |
|
RU2122958C1 |
Использование: подъемно-транспортное машиностроение Сущность: приводное устройство тали выполнено в виде рабочего ролика, контактирующего с грузовой многорядной цепью, огибающей зубчатые венцы неподвижной ведущей звездочки, и размещенного своей осью в гнезде тягового колеса За счет ручного перемещения бесконечной цепи приводится во вращение против часовой стрелки тяговое колесо, при этом рабочий ролик приходит в соприкосновение с грузовой цепью и перемещает ее. Затем рабочий ролик выходит из контакта с цепью и, перемещаясь вместе с тяговым колесом, приходит в исходное положение. Опускание грузовой цепи и груза происходит аналогично, но при вращении тягового колеса по часовой стрелке 3 ил
Гф
(1)
где dp - диаметр ролика втулочно-ролико- вой грузовой цепи 1, имеющий шаг t.
Радиус окружностей центра рабочего ролика 19 составляет R. Условием нормального взаимодействия ролика 19 с цепью 1 является такое соотношение геометрических параметров, при котором обеспечивается вывод ролика цепи в зону некасания его вершин зубьев неподвижной звездочки 3 (ее венцов 8 и 9) согласно выражению
R + ГФ
(2)
Кроме того, число шагов цепи Zt. в кривой acb (фиг.З) должно быть больше числа шагов Z0 в отрезке дуги ab радиуса R0 на целое число AZ, причем
-Z
(3)
Таль работает следующим образом.
За счет ручного перемещения бесконечной цепи 5 приводится во вращение против часовой стрелки приводное колесо 6 с угловой частотой ш (фиг.З). При этом рабочий ролик 19 с центром вращения От приходит в соприкосновение с грузовой цепью 1 (по фиктивному радиусу Гф). В пределах угла
Формула изобретения Ручная таль, содержащая неподвижный корпус, выполненный из двух фланцев, связанных между собой стяжными болтами и распорными втулками, огибаемыми втуЛоч- но-роликовой грузовой цепью, крюковую обойму и установленную в корпусе ведущую звездочку, приводное колесо, охваченное бесконечной цепью, отличающаяся
В течение дальнейшего вращения колеса 6 рабочий ролик 19 вхолостую перегоняет гофр цепи acb в петлю 28 цепи 1, которая соответствует удлиняется. Ролик 19 при этом проходит положения Оа-Оз-СМ. Затем
ролик 19 выходит из контакта с цепью, перемещается вместе с колесом 6 вне контакта с цепью и приходит в исходное положение (точка Oi). Опускание грузовой цепи и груза производится аналогично, но
при вращении тягового колеса по часовой стрелке.
Эксцентричная установка оси 20 рабочего ролика 19 позволяет регулировать дли- ну гофра acb.
В любом положении при переходе рабочего ролика 19 из положения Oi в 04 имеет место дуга покоя цепи, определяемая выражением
а0 л - 2 а
(6)
Этим обеспечивается условие самоторможения передачи, т.е. при исчезновении крутящего момента на приводном колесе 6 падение груза исключается из-за наличия дуги покоя - дуги сцепления грузовой цепи 1 с венцами 8 и 9 неподвижной звездочки 3, что исключает необходимость применения 0 грузоупорного тормоза.
тем, что, с целью упрощения конструкции, ведущая звездочка выполнена в виде двух зубчатых венцов, жестко прикрепленных к 5 соответствующим фланцам корпуса, а таль снабжена осью, закрепленной эксцентрично в упомянутом приводном колесе, и роликом, расположенным на упомянутой оси между зубчатыми венцами с возможностью взаимодействия с атулочно-роликовой грузовой цепью
12
5
F3 Фиг/
А-А
11
79
28
Фиг. 2
ФигЗ
| Александров М.П | |||
| Подъемно-транспортные машины.-М.: Машиностроение, 1985, с | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
