1
(21)4846066/08
(22) 02.07.90
(46) 23.09.92. Бюл. № 35
(71)Ереванский политехнический институт им. К.Маркса
(72)А.В.Кочикян и А.Л.Акопян
(56)Авторское свидетельство СССР № 781049, кл. В 25 J3/00, 1979. (54) МАНИПУЛЯТОР
(57)Использование: при автоматизации контрольно-измерительных и технологических процессов в системах точного позиционирования. Сущность: манипулятор получает от дополнительного привода 5 дополнительную степень подвижности исполнительного органа 1, что позволяет ему перемещаться в трех взаимно-перпендикулярных плоскостях и тем самым расширить кинематические возможности. Дополнительный привод 5 исполнительного органа расположен на сновании перпендикулярно двум основным приводам. 
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ РЫЧАЖНЫЙ РЕГУЛИРУЕМЫЙ МЕХАНИЗМ | 2002 |
|
RU2207461C1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| Устройство для управления манипулятором | 1983 |
|
SU1093541A1 |
| Манипулятор | 1979 |
|
SU781049A1 |
| СТАТИЧЕСКИ СБАЛАНСИРОВАННОЕ МАНИПУЛЯЦИОННОЕ УСТРОЙСТВО ДЛЯ ЛАЗЕРНЫХ ТЕХНОЛОГИЙ | 2024 |
|
RU2829905C1 |
| МАНИПУЛЯТОР ДЛЯ ПРЕЦИЗИОННОГО ПОЗИЦИОНИРОВАНИЯ | 2013 |
|
RU2547981C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| ПАРАЛЛЕЛЬНЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2753217C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Способ управления исполнительным механизмом робота-манипулятора с силомоментной обратной связью и устройство для его осуществления | 2018 |
|
RU2699703C1 |
Изобретение относится к машиностроению, а именно, к системам точного позиционирования, и может быть использовано при автоматизации контрольно-измерительных и технологических процессов.
Известны манипуляторы, содержащие основание, исполнительный орган, перпендикулярные друг относительно друга два привода и две каретки, кинематически связанные между собой и с соответствующими приводами. Один из приводов установлен на основании, а дугой - на одной из кареток.
Недостаток этих манипуляторов заключается в том, что они имеют низкие динамические характеристики, обусловленные тем, что привод по одной из координат установлен на одной из кареток, что приводит к увеличению масс подвижных частей. Кроме этого деформации коммуникации при подвижном приводе снижают надежность работы манипуляторов.
Наиболее близким потехнической сущности является манипулятор, содержащий основание с расположенными на нем двумя перпендикулярными друг относительно
друга приводами, две перпендикулярные друг относительно друга каретки, кинематически связанные между собой и с соответствующими приводами, а также платформу с исполнительным органом.
Манипулятор отличается высокими динамическими характеристиками и надежностью, однако имеет ограниченную зону обслуживания из-за наличия только двух степеней подвижности исполнительного органа, что существенно сужает его функциональные возможности.
Целью изобретения является расширение зоны обслуживания при одновременном сохранении его надежности и высоких динамических характеристик.
Поставленная цель достигается тем, что в известном манипуляторе, содержащем основание с расположенными на нем двумя основными, перпендикулярными друг относительно друга приводами, две основные, перпендикулярные друг относительно друга каретки, кинематически связанные между собой и соответствующими приводами, а также платформу с исполнительным орга(Л
С
IVI
О
СО
V4 Ю
ном, согласно изобретению он снабжен установленным также на основании дополнительным приводом, перпендикулярным к двум основным, и дополнительной кареткой, перпендикулярной к двум основным и кинематически связанной с первой основной кареткой и с дополнительным приводом, при этом исполнительный орган расположен на второй основной каретке, а платформа кинематически связана с последней и с соответствующим ей приводом,
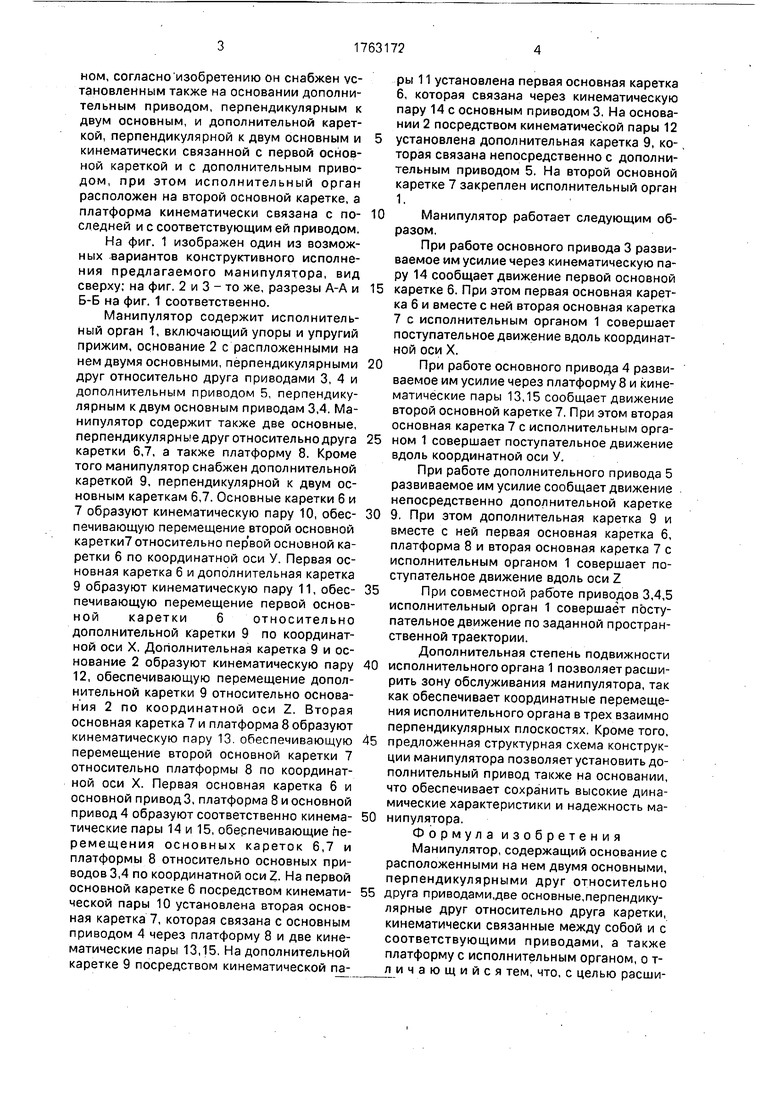
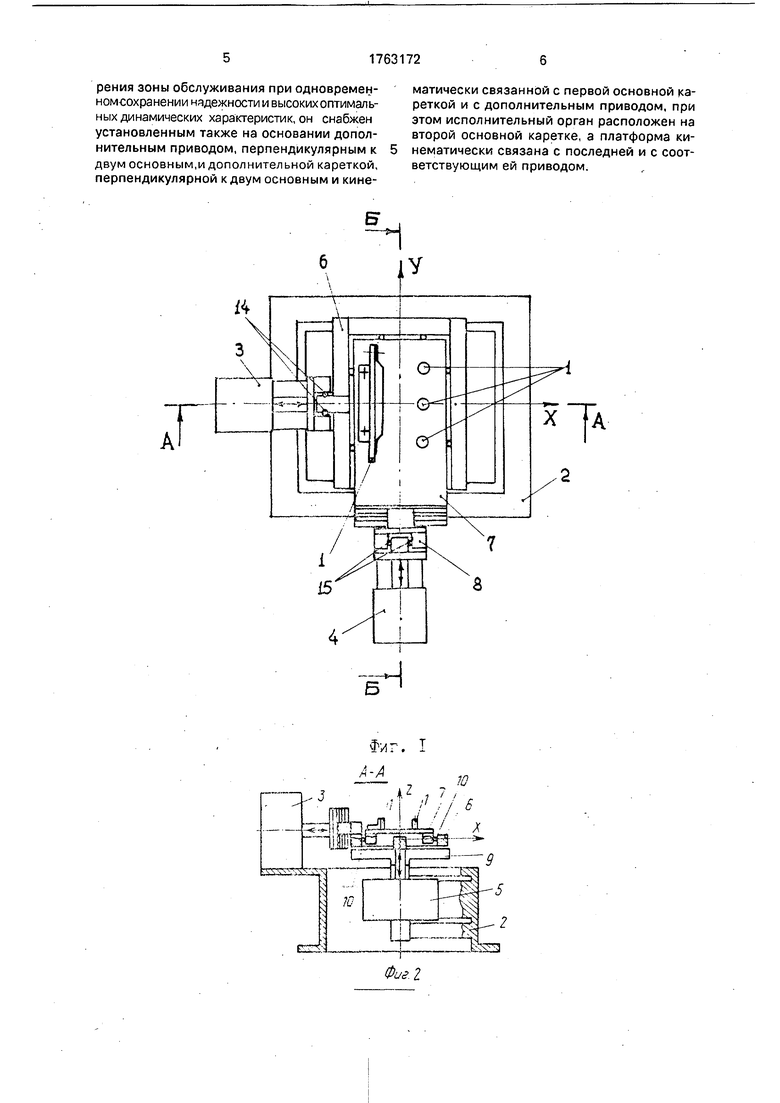
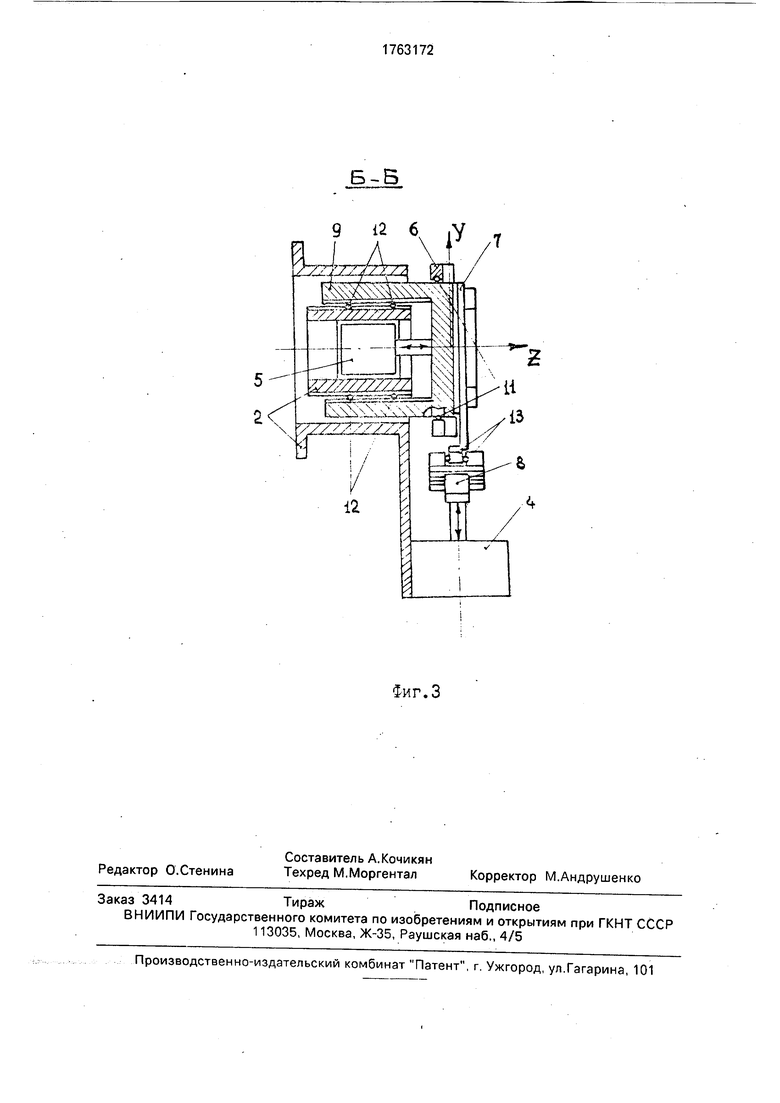
На фиг. 1 изображен один из возможных вариантов конструктивного исполнения предлагаемого манипулятора, вид сверху; на фиг. 2 и 3 - то же, разрезы А-А и Б-Б на фиг. 1 соответственно.
Манипулятор содержит исполнительный орган 1, включающий упоры и упругий прижим, основание 2 с распложенными на нем двумя основными, перпендикулярными друг относительно друга приводами 3, 4 и дополнительным приводом 5, перпендикулярным к двум основным приводам 3,4. Манипулятор содержит также две основные, перпендикулярные друг относительно друга каретки 6,7, а также платформу 8. Кроме того манипулятор снабжен дополнительной кареткой 9, перпендикулярной к двум основным кареткам 6,7. Основные каретки 6 и 7 образуют кинематическую пару 10, обеспечивающую перемещение второй основной каретки относительно пер вой основной каретки б по координатной оси У. Первая основная каретка 6 и дополнительная каретка 9 образуют кинематическую пару 11, обеспечивающую перемещение первой основной каретки 6 относительно дополнительной каретки 9 по координатной оси X. Дополнительная каретка 9 и основание 2 образуют кинематическую пару 12, обеспечивающую перемещение дополнительной каретки 9 относительно основания 2 по координатной оси Z. Вторая основная каретка 7 и платформа 8 образуют кинематическую пару 13 обеспечивающую перемещение второй основной каретки 7 относительно платформы 8 по координатной оси X. Первая основная каретка 6 и основной привод 3, платформа 8 и основной привод 4 образуют соответственно кинематические пары 14 и 15, обеспечивающие перемещения основных кареток 6,7 и платформы 8 относительно основных приводов 3,4 по координатной оси Z. На первой основной каретке 6 посредством кинематической пары 10 установлена вторая основная каретка 7, которая связана с основным приводом 4 через платформу 8 и две кинематические пары 13,15. На дополнительной каретке 9 посредством кинематической пары 11 установлена первая основная каретка 6, которая связана через кинематическую пару 14 с основным приводом 3. На основании 2 посредством кинематической пары 12
установлена дополнительная каретка 9, ко-. торая связана непосредственное дополнительным приводом 5. На второй основной каретке 7 закреплен исполнительный орган 1.
Манипулятор работает следующим образом.
При работе основного привода 3 развиваемое им усилие через кинематическую пару 14 сообщает движение первой основной
каретке 6. При этом первая основная каретка 6 и вместе с ней вторая основная каретка 7 с исполнительным органом 1 совершает поступательное движение вдоль координатной оси X.
При работе основного привода 4 развиваемое им усилие через платформу 8 и кинематические пары 13,15 сообщает движение второй основной каретке 7, При этом вторая основная каретка 7 с исполнительным органом 1 совершает поступательное движение вдоль координатной оси У.
При работе дополнительного привода 5 развиваемое им усилие сообщает движение непосредственно дополнительной каретке
При совместной работе приводов 3,4,5
исполнительный орган 1 совершает поступательное движение по заданной пространственной траектории.
Дополнительная степень подвижности
исполнительного органа 1 позволяет расширить зону обслуживания манипулятора, так как обеспечивает координатные перемещения исполнительного органа в трех взаимно перпендикулярных плоскостях. Кроме того,
предложенная структурная схема конструкции манипулятора позволяет установить дополнительный привод также на основании, что обеспечивает сохранить высокие динамические характеристики и надежность манипулятора.
Формула изобретения Манипулятор, содержащий основание с расположенными на нем двумя основными, перпендикулярными друг относительно
друга приводами,две основные,перпендикулярные друг относительно друга каретки, кинематически связанные между собой и с соответствующими приводами, а также платформу с исполнительным органом, о тл ичающийся тем, что, с целью расширения зоны обслуживания при одновремен- номсохранении надежности и высокихоптималь- ных динамических характеристик, он снабжен установленным также на основании дополнительным приводом, перпендикулярным к двум основным,и дополнительной кареткой, перпендикулярной к двум основным и кинеГ
СГ5
матически связанной с первой основной кареткой и с дополнительным приводом, при этом исполнительный орган расположен на второй основной каретке, а платформа кинематически связана с последней и с соответствующим ей приводом.
Й23
Б-Б
Фиг.З
