(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения захвата манипулятора | 1982 |
|
SU1079599A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2176950C2 |
| Манипулятор | 1990 |
|
SU1763172A1 |
| Промышленный робот | 1986 |
|
SU1421523A1 |
| Манипулятор | 1977 |
|
SU738866A1 |
| Способ управления исполнительным механизмом робота-манипулятора с силомоментной обратной связью и устройство для его осуществления | 2018 |
|
RU2699703C1 |
| ПОВОРОТНЫЙ ПРИВОД ЗВЕНА РЕЗОНАНСНОЙ МЕХАНИЧЕСКОЙ РУКИ | 2003 |
|
RU2271273C2 |
| Манипулятор | 1980 |
|
SU1050863A1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
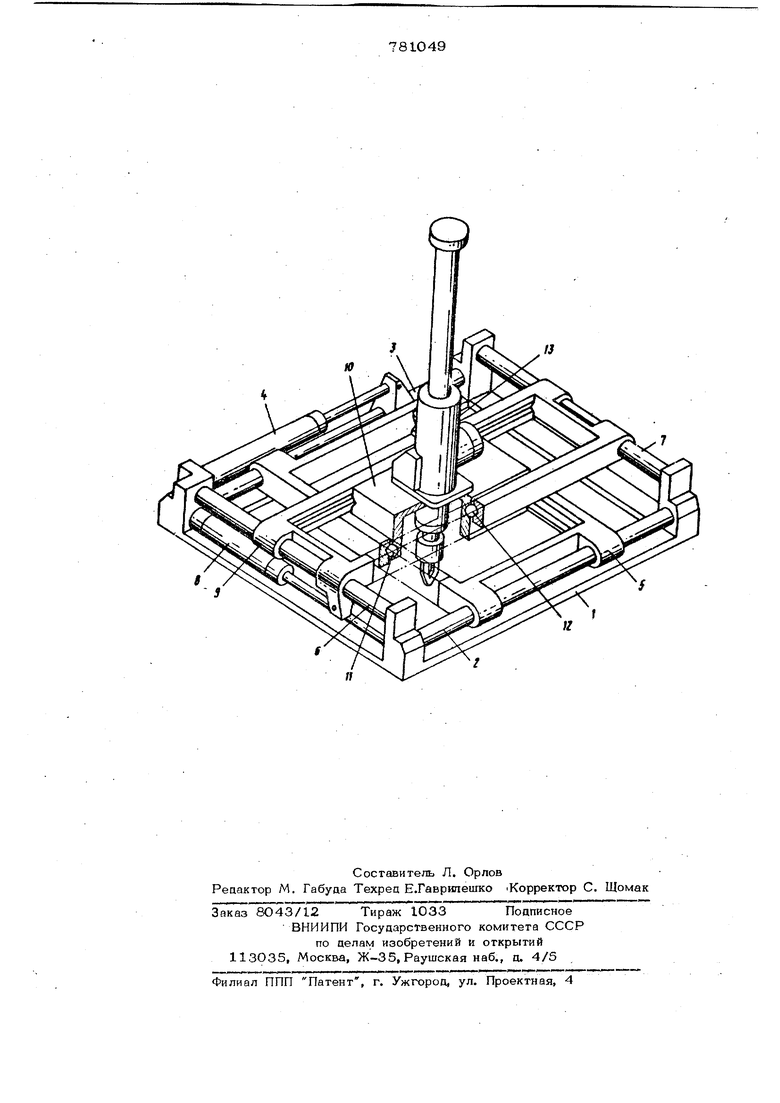
И8о% етение относится к машинострое нию, в частности к автоматизации различных технологических процессов. Известен манипулятор, содержащий НСпоЛИИтельный орган и основание с рас положенными на нем двумя каретками. Кинематически связанными с приводами и устйновленныш на направляющих закрепленных на основании поа углом друг к цругу Однако в этом манипуляторе привод, первм&в.ваощиЛ каретку с исполнительным органом относительно второй карет ки, установлен на второй, также подвиж вой каретке, что вызывает необходамост гф именёния специальных устройств, обес пёчивакнцих питание этого привода в раз личных положениях его относительно манипулятора, что вызьгоает увеличение Габаритов и массы подвижных частей манипулятора, а также снижает надежность его работы. Цель изобретения - увеличение ндюежч ности и уменьшение моментов инерции перемещающихся масс. Цель достигается тем, что манипулятор снабжен платформой, на которой установлен исполнительный орган манипулятора, причем платформа связана с обеими каретками посредсгаом опор, а приводы расположены на основании манипулятора. На чертеже схематически изображен манипулятор. Манипулятор содержит основание 1 с расположенными на нем направляющими 2 и 3, на которых с возможностью перемещений от привода 4, смонтированного на основании, установлена каретка 5. Перпендикулярно к направляющим 2 и 3 закреплены направляющие 6 и 7, на которых с возможностью перемещения от привода 8, также смонтированного на основании, установлена каретка 9, Платформа 10, с одной стороны, установлена на кфетке 5 при помощи опор 11 таким офазом, что обеспечивается ее перемещение относительно каретки 5 в направлении, перпендикулярном направлению перемещения каретки 5 по направляющим 2 и 3}с другой стороны, платформа 10 установлена на каретке 9 при помощи -таких же опор 12 таким образом, что, обеспечивается ее перемещение относительно каретки 9 в направлении, перпендакулярном направлению перемещения каретки 9 по направляющим 6 и 7, На платформе 10 установлен исполнительный орган - механическая рука 13. Манипулятор работает следующим образом.
При работе привода 4 каретка 5 перемещается по направляющим 2 и 3. Вместе с ней в этом же направлении при .помощи опор 11 перемещается платформа Ш с. механической рукой t3. При работе привода 8 по направлякяцим 6 и 7 перемещается каретка 9, вместе с которой при помощи опор 12 перемещается платформа Ю, При одновременной работе привоцов 4 и 8 перемещаются обе каретки 5 и 9, а платформа 10 с механической рукой 13 перемещается по двум направлениям одновременно, причем траектории движения платформы определяется соо-геошеняем скоростей перемещений исполнительных элементов приводов 4 и 8,.
Благодаря расположению исполнительного органа манипулятора на платформе,
связанной с каретками опорами, обеспечивающими возможность ее перемещения относительно кареток, становится возможной установка приводов на основании, что позволяет осуществить подвод питания к приводам по стационарным коммуникациям и тем самым повысить на- дежность и уменьшить моменты инерции перемещающихся масс.
Формула изобретения
Манипулятор, содержащий исполнительный орган и основание с расположенными на нем двумя каретками, кинематически связанными с приводами и установленными на направляющих, закрепленных на основании под углом друг к другу, отличающийся тем, что, с целью увеличения надежности и уменьшения моментов энергии перемещающихся масс, он снабжен платформой, на которой установлен исполнительный орган, причем платформа кинематически связана с обеими каретками посредством опор а приводы расположены На основании манипулятора.
Источники информации, принятые во внимание при экспертизе 1. Патент Франции .№ 2348786, кл. В 23 Q 1/2О, опублик, 1977.
