1
(21)4820845/10 (22)30.05.90 (46)23.09.92. Бюл. №35
(71)Рижский производственно-технический центр Инфотехника
(72)В.Д.Гребенко, В.Г.Ефимов, И.Г.Зель- ман, А.К.Иванов, А.Г.Келле, А.Ш.Лейбович, Э.С.Селицер, В.Н.Флегантови А.У.Фрайзус
(56)Весоизмерительные приборы и дозирующие устройства. Справочник, М., 1965.
Авторское свидетельство СССР № 662817, кл, G 01 G 3/16, 1977.
Авторское свидетельство СССР № 1318798, кл. G 01 G 3/16, 1985. (54) СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ГРУЗА
(57)Использование: приборостроение, определение массы груза в динамическом режиме. Сущность изобретения1 упруго подвешенной грузоприемной платформе 2 со свободно размещенным на ней грузом 6 создают вертикальные колебания, период которых определяют как среднее значение периода свободно затухающих колебаний за заданный промежуток времени при устойчивом режиме колебаний. Колебания грузоприемной платформы 2 возбуждают посредством приложения к ней единичного импульса, величина которого выбирается из условия: S (то + тх) 7/00 Д t, где IJ/WK g. где то - масса грузоприемной платформы, тх - масса груза, у (t) - ускорение грузоприемной платформы, At - время действия импульса силы, g -ускорение свободного падения. 1 ил.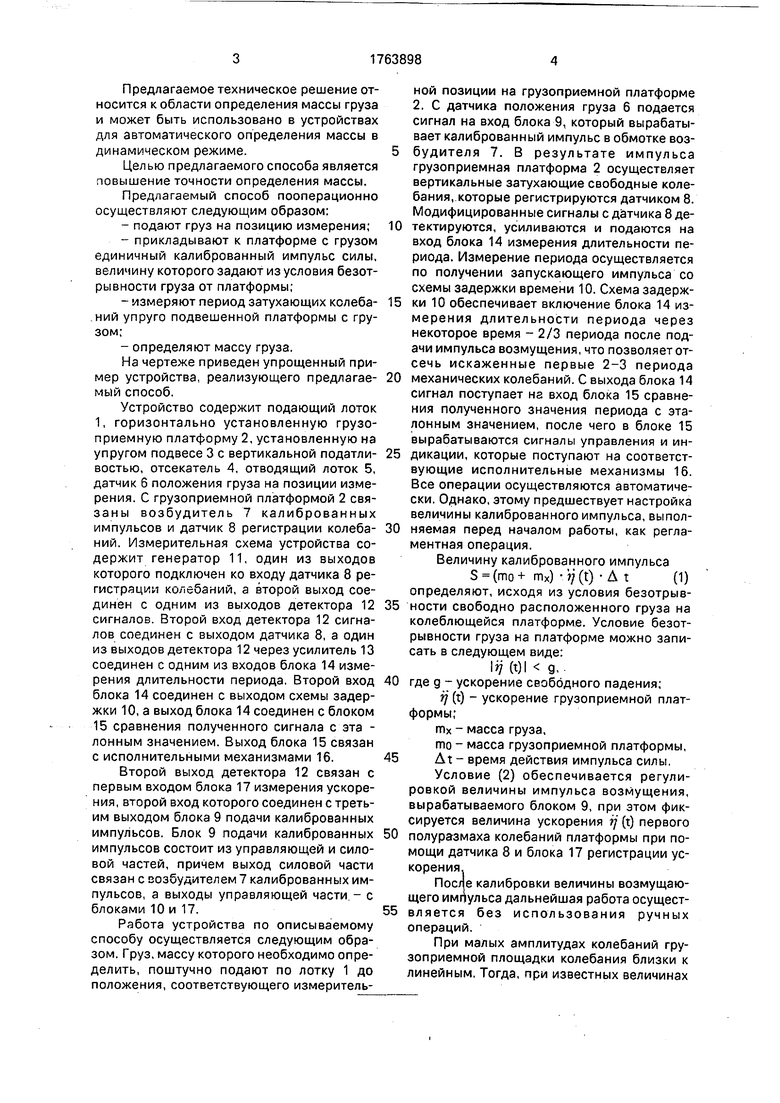
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ИЗДЕЛИЯ ПРИ ПНЕВМОТРАНСПОРТИРОВАНИИ | 1994 |
|
RU2091722C1 |
| Весовой порционный дозатор | 1985 |
|
SU1318798A1 |
| МАССОМЕТРИЧЕСКИЙ СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2148800C1 |
| Конвейерные весы | 1983 |
|
SU1137327A1 |
| Весоизмерительное устройство | 1979 |
|
SU918793A1 |
| Стенд для измерения массы, координат центра масс и моментов инерции изделий | 2024 |
|
RU2830397C1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1046619A1 |
| УСТРОЙСТВО ВЗВЕШИВАНИЯ И РАСПРЕДЕЛЕНИЯ ВЕСА ТЕЛА ЧЕЛОВЕКА ПО ОПОРНЫМ ПОВЕРХНОСТЯМ (ЗОНАМ) | 2003 |
|
RU2247337C1 |
| Устройство для измерения массы | 1979 |
|
SU777462A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ВЯЗКОГО ТРЕНИЯ ПНЕВМОКОЛЕС НАЗЕМНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2015 |
|
RU2578827C1 |

0&
J
Ј
со
00 Ю 00
Предлагаемое техническое решение относится к области определения массы груза и может быть использовано в устройствах для автоматического определения массы в динамическом режиме.
Целью предлагаемого способа является повышение точности определения массы.
Предлагаемый способ пооперационно осуществляют следующим образом:
-подают груз на позицию измерения;
-прикладывают к платформе с грузом единичный калиброванный импульс силы, величину которого задают из условия безот- рывности груза от платформы;
-измеряют период затухающих кслеба- ний упруго подвешенной платформы с грузом;
-определяют массу груза.
На чертеже приведен упрощенный пример устройства, реализующего предлагав- мый способ.
Устройство содержит подающий лоток 1, горизонтально установленную грузо- приемную платформу 2, установленную на упругом подвесе 3 с вертикальной податли- востью, отсекатель 4, отводящий лоток 5, датчик 6 положения груза на позиции измерения. С грузоприемной платформой 2 связаны возбудитель 7 калиброванных импульсов и датчик 8 регистрации колеба- ний. Измерительная схема устройства содержит генератор 11, один из выходов которого подключен ко входу датчика 8 регистрации колебаний, а второй выход соединен с одним из выходов детектора 12 сигналов. Второй вход детектора 12 сигналов соединен с выходом датчика 8, а один из выходов детектора 12 через усилитель 13 соединен с одним из входов блока 14 измерения длительности периода. Второй вход блока 14 соединен с выходом схемы задержки 10, а выход блока 14 соединен с блоком 15 сравнения полученного сигнала с эта - лонным значением. Выход блока 15 связан с исполнительными механизмами 16.
Второй выход детектора 12 связан с первым входом блока 17 измерения ускорения, второй вход которого соединен с третьим выходом блока 9 подачи калиброванных импульсов. Блок 9 подачи калиброванных импульсов состоит из управляющей и силовой частей, причем выход силовой части связан с возбудителем 7 калиброванных импульсов, а выходы управляющей части - с блоками 10 и 17.
Работа устройства по описываемому способу осуществляется следующим образом. Груз, массу которого необходимо определить, поштучно подают по лотку 1 до положения, соответствующего измерительной позиции на грузоприемной платформе 2. С датчика положения груза 6 подается сигнал на вход блока 9, который вырабатывает калиброванный импульс в обмотке возбудителя 7. В результате импульса грузоприемная платформа 2 осуществляет вертикальные затухающие свободные колебания, которые регистрируются датчиком 8. Модифицированные сигналы с датчика 8 детектируются, усиливаются и подаются на вход блока 14 измерения длительности периода. Измерение периода осуществляется по получении запускающего импульса со схемы задержки времени 10. Схема задержки 10 обеспечивает включение блока 14 измерения длительности периода через некоторое время - 2/3 периода после подачи импульса возмущения, что позволяет от- сечь искаженные первые 2-3 периода механических колебаний. С выхода блока 14 сигнал поступает на вход блока 15 сравнения полученного значения периода с эталонным значением, после чего в блоке 15 вырабатываются сигналы управления и индикации, которые поступают на соответствующие исполнительные механизмы 16. Все операции осуществляются автоматически. Однако, этому предшествует настройка величины калиброванного импульса, выполняемая перед началом работы, как регламентная операция.
Величину калиброванного импульса
S (mo+ mx) -7/(Г) Д t(1)
определяют, исходя из условия безотрыв- ности свободно расположенного груза на колеблющейся платформе. Условие безот- рывности груза на платформе можно записать в следующем виде:
i Ml g.
где g - ускорение свободного падения;
rj (t) - ускорение грузоприемной платформы;
тх - масса груза,
то - масса грузоприемной платформы,
Д| - время действия импульса силы,
Условие (2) обеспечивается регулировкой величины импульса возмущения, вырабатываемого блоком 9, при этом фиксируется величина ускорения / (t) первого полуразмаха колебаний платформы при помощи датчика 8 и блока 17 регистрации ускорения.
После калибровки величины возмущающего импульса дальнейшая работа осущест- вляется без использования ручных операций.
При малых амплитудах колебаний грузоприемной площадки колебания близки к линейным. Тогда, при известных величинах
массы грузоприемной площадки сдатчиком (без груза ) то, средней величины периода То колебаний грузоприемной площадки без груза, измеряют среднюю величину периода колебаний Тх грузоприемной площадки с грузом, после чего массу груза тх определяют по формуле:
Т 2 -г 2
IX 1C
- ГПо
Ј (3)
Периоды То и Тх колебаний грузоприемной площадки без груза и с грузом определяются в процессе затухающих колебаний как средние величины на базовом числе колебаний, например, за 10 колебаний.
Таким образом, предлагаемый способ позволяет определять массу груза с высокой точностью в результате исключения влияния переходного процесса и усреднения измерений на нескольких, порядка десяти, периодов. Точность измерения может быть повышена за счет увеличения числа периодов на временном интервале усреднения. Способ может быть использован в системах дозирования порций грузов, при этом электрический сигнал измеряемого периода колебаний грузонесущей платформы с грузом может служить в качестве управляющего сигнала. Это позволяет встраивать устройство, работающее по данному способу, в линию для расфасовки и упаковки пищевых или иных сыпучих или штучных грузов.
Ф о р м у л а и з о б р е т е н и я
Способ определения массы груза, включающий возбуждение вертикальных колебаний упруго подвешенной грузоприемной платформы со свободно размещенным на
ней грузом, определение периода колебаний нагруженной платформы и определение по нему величины измеряемой массы, отличающийся тем, что, с целью повышения точности определения массы, период
колебаний определяют как среднее значение периода свободно затухающих колебаний за данный промежуток времени при устойчивом режиме колебаний, а колебания грузоприемной платформы возбуждают посредством приложения к ней единичного импульса, величина которого выбирается из условия
S (mo+ тх) /(t) A t, где (t)l g. где то - масса грузоприемной платформы;
тх - масса груза;
Щ W ускорение грузоприемной платформы;
At- время действия импульса силы; g - ускорение свободного падения.
