Изобретение относится к весоизмерительной технике и может быть исг, пользовано для непрерывного и дискретного измерения массы груза, транспортируемого на ленточном, пластинчатом, тарельчатом, шнековом, ковшовом и других видах конвейеров.
Известны конвейерные весы содержащие два грузоприемных механизма, установленные соответственно на преобразователях силы под конвейерной лентой, два умножителя, два блока масштабирования, четыре сумматора, два .блока управления, элемент задержки, задатчик калиброванной нагрузки,
I преобразователь скорости конвейерной ленты, калиброванную нагрузку в ви де роликовой цепи, суммирующий счетчик, индикатор и коммутаторы щ,
Недостатками данного устройства являются сравнительно узкие функциональные возможности, ограниченные использованием только ленточных конвейеров, сложная конструкция в результате наличия двух грузоприемных механизмов, имеющих сложные кинематические и электрические связи между собой, подвижной лентой, механическими и электрическими блоками, невысокий ресурс работы, так как ограничены возможности устройства в отношении переменных нагрузок, и низкая надежность, обусловленная сложными механическими сочленениями и абразивным износом трущихся частей. Наиболее близким к предлагаемым по технической сущности являются конвейерные весы, содержащие грузоприемную платформу и датчики массы и скорости подключенные к блоку управления, соединенному с индицирукицим блоком {21
Однако известное устройство может функционировать только на ленточных конвейерах.
Цель изобретения - обеспечение возможности измерения при любом типе конвейера.
Поставленная цель достигается тем что в конвейерные весы, содержащие. грузоприемную платформу и датчики массы и скорости, подключенные к блоку управления, соединенному с индицирующим блоком, введены вибропривод с подвижной рамой, компрессор, регулятор давления, домкрат с приводом и упругий элемент с управляемой жесткостью, грузоприемная платформа выполне.на в виде отводного лотка.
а датчик массы - в виде виброакселерометра, причем грузоприемная платформа установлена на подвижной раме, которая одним концом шарнирно связана с виброприводом, на котором смонтирован домкрат, связанный с другим концом подвижной рамы, и установлен виброакселеромегр, а вибропривод установлен на упругом элементе с управляемой жесткостью, причем вибропривод, привод домкрата, регулятор давления и компрессор подключены к выходам блока управления, а упругий элемент с управляемой жесткостью через регулятор давления связан с компрессором.
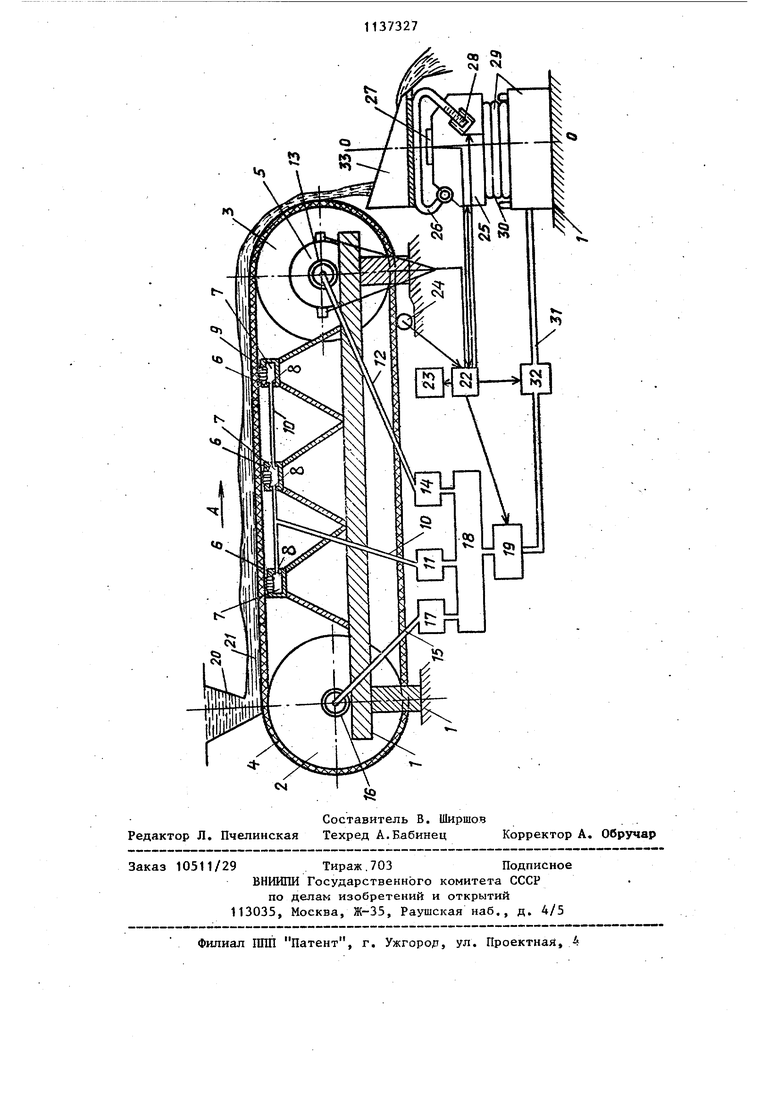
На чертеже показана функциональная схема конвейерных весов.
На ,основании 1 установлены натяжной барабан .2 и приводной барабан 3, на которых размещена транспортирующая часть - гибкая лента 4.
На основании 1 размещен также управляемый привод 5, кинематически связанный с приводным барабаном 3, и пористые опоры скольжения 6, имеющие внутренние полости 7, питающие входные отверстия 8 и капилляры 9. Питающее входное отверстие 8 каждой пористой опоры 6 скольжения посредством первого газопровода 10 связано с первым стабилизатором 11 давления газа. Посредством второго газопровода 12 газовый подшипник 13 приводного барабана 3 связан с вторым стабилизатором 14 давления газа. Посредством третьего газопровода 15 газовый подшипник 16 натяжного барабана 2 связан с третьим стабилизатором 17 давения газа.
Первый, второй и третий стабилизаторы давления газа 11, 14 и 17 соединены с очистителем 18 сжатого газа, который соединен с компрессором 19.
Бункер 20, укрепленный над тран спортирующей частью 4 на основании 1, наполнен грузом 21, Блок 22 управения, установленный на основании 1, подключен к управляемому приводу 5 и компрессору 19.
Первый выход блока 22 управления одключен к входу управляемого привоа 5, второй выход - к входу индикаорного блока 23. Выход датчика 24 корости подключен к первому входу лока 22 управления.
Вибропривод 25 кинематически свяан с подвижной рамой 26. На вибропри3воде 25 установлен виброакселерометр 27. Подвижная рама 26 одним ко цом шарнирно установлена на вибропри воде 25, а другим кинематически (например, с помощью кинематической пары винт - гайка) связана с домкратом 28. Вибропривод 25 с подвижной рамой 26 установлены на основании 1 посредством упругого элемента 29 с управляемой жесткостью, который выполнен, например, в виде одного или нескольких заполненных сжатым газом сильфонов 30, связанных с помощью четвертого газопровода 31 через регу лятор 32 давления с компрессором 19 На подвижной раме 26 установлена грузопрйёмная платформа - отводной лоток 33. Третий, четвертый, пятьй и шестой выходы блока 22 управления подключены соответственно к входам вибропривода 25 и привода 28 домкрата, регулятору 32 давления и компрессору 19. Выход виброакселерометра 27 подсоединен к второму входу блока 22 управления. Направление местной вертикали обозначено 00. Подготовка к работе конвейерных весов происходит следующим образом. От блока 22 управления подают команду на включение компрессора 19, который подает сжатый газ, например воздух, через очиститель 18 сжатого газа, первый 11-, второй 14 и третий 17 стабилизаторы давления газа в пористые опоры 6 скольжения, газовый подшипник 13 приводного барабана 3 и газовый подшипник 16 натяжного барабана 2 Под действием давления газа, выходящего их капилляра 9, между поверхностями пористых опор 6 скольжения и транспортирующей частью гибкой лентой 4 образуется газовая смазка в образовавшемся газовом зазоре. После образования газовой смазки в зазоре между пористыми опорами 6 скольжения и гибкой лентой 4 ленточный конвейер готов к работе. Дпя подготовки к работе грузоприемной платформы - отводного лотка 33 от блока 22 управления на регулятор 32 давления подают команду на заполнекие сжатым газом сильфона 30, который заполняется до заданного значе ния, обеспечивающего установленную 274 жесткость упругого элемента 29 с управляемой жесткостью. С помощью домкрата 28 с приводом по команде от блока 22 управления устанавливают положение.рабочей плоскости грузоприемной платформы отводного лотка 33, например перпендикулярное относительно направления местной вертикали 00. Вибропривод 25 по команде от блока 22 управления запускается, грузопрйёмная платформа - отводной лоток 33 получает колебательное движение (например, синусоидальное), направленное от приемного к выходному концу грузо- приемной платформы - отводного лотка 33. Период колебания колебательной системы, включающей массу вибропривода 25, подвижной -рамы 26, виброакселерометра 27, домкрата 28 с приводом и грузоприемной платформы - отводного лотка 33, составляет I; - , где Tjj - период колебания системы; mj - масса установочная; с - жесткость упругого элемента. Т- CJ где СО - круговая частота колебания. 21 , . . тГ ,где I - частота колебания. При заданной (установочной) жесткости упругого элемента 29 с управляемой жесткостью частота колебаний i зависит только от величины массы ftf, Начальная величина частоты колеаний fо, вертикальная составляющая оторой воспринимается виброакселеометром 27, передается на блок 22 правления и индикаторный блок 23, де фиксируется как нулевое значение ассы. От датчика 24 скорости на блок 2 управления подается сигнал, соотетствующий скорости траыспортир оцей асти (гибкой ленты) 4. В блоке 22 правления производится умножение игнала, характеризующего величинуассы и скорости, т.е. определяется роизводительность транспортируемого руза 21. В исходном (начальном) положении то произведение равно условному ную (поскольку масса исходного положеия принята равной нулю). S Весы работают следующим образом. При поступлении груза 21 на грузо приемную платформу - отводной лоток 33 масса его вызывает отклонение частоты колебания колебательной системы (ука занной выше), значение которой иодается на блок 22 управления , где „ измеряемое значение массы груза 21, проходящего через грузоприемную платформу - отводной лоток 33 Указанное значение (после Извлече ния квадратного корня) перемножается с величиной измеренной скорости, поступающей в блок 22 управления от датчика 24 скорости, и выдается на индикаторный блок 23, где регистрируется как производительность перемещаемого груза 21. Для обеспечения соответствия скорости перемещения груза 21 через грузоприемную платформу - отводной лоток 33 скорости его перемещения по транспортирующей части (гибкой ленте) 4 конвейера от блока 22 управления на регулятор 32 Давления 76 подаются команды управляющие жесткостью упругого элемента 29 с управляющей жесткостью которая обеспечивается путем изменения давления в сильфоне 30. С помощью ступенчатого изменения давления в сильфоне 30 обеспечивается переход на другие диапазоны производительности перемещаемого груза 21. Изменения производительности в небольщих пределах обеспечиваются с помощью установки соответствующего угла наклона рабочей плоскости грузоприемной платформы - отводного лотка 33 относительно направления местной вертикали 00. Указанные регулировочные установки производительности могут выполняться как в статическом положении, так и при работе устройства по командам от блока 22 управления. Таким образом, предлагаемые конвейерные весы могут быть использованы на любьк типах конвейеров (ленточных, пластинчатых, тарельчатых, шнековых, ковщовых и др.).
| название | год | авторы | номер документа |
|---|---|---|---|
| Контрольно-весовое устройство для отбраковки штучных грузов | 1979 |
|
SU859826A1 |
| Конвейерные весы | 1983 |
|
SU1439409A1 |
| Загрузочное устройство для конвейеров | 1978 |
|
SU781152A1 |
| Инерционный конвейер | 1990 |
|
SU1728095A1 |
| Конвейерные весы | 1982 |
|
SU1242717A1 |
| Устройство для измерения и сортировки изделий малых масс | 1989 |
|
SU1643942A1 |
| Способ определения массы груза | 1990 |
|
SU1763898A1 |
| ИСТОЧНИК СЕЙСМИЧЕСКИХ СИГНАЛОВ УДАРНОГО ТИПА | 2002 |
|
RU2246740C2 |
| Устройство для механизированного снятия и сбора насалки после спуска судна со стапеля | 2024 |
|
RU2840172C1 |
| ВЕСЫ | 1994 |
|
RU2085869C1 |
КОНВЕЙЕРНЫЕ ВЕСЫ, содержащие грузоприемную платформу и датчики массы и скорости, подключенные к блоку управления, соединенному с индицирующим блоком, отличающиеся тем, что, с целью обеспечения возможности измерения при любом типе конвейера, в них введены вибропривод с подвижной рамой, компрессор, регулятор давления, домкрат с приводом и упругий элемент с управляемой жесткостью, грузоприемная платформа вьтолнена в виде отводного лотка, а датчик массы - в виде виброакселерометра, причем грузоприемная платформа установлена на подвижной раме, которая одним концом шарнирно связана с виброприводом, на котором смонтирован домкрат, связанный с другим концом подвижной рамы, и установлен виброакселерометр, а вибропривод установлен на упругом эле-i менте с управляемой жесткостью, при в чем вибропривод, привод домкрата, регулятор давления и компрессор подключены к выходам блока управления, а упругий элемент с управляемой жесткостью через регулятор давления связан с компрессором.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Конвейерные весы | 1980 |
|
SU885817A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
