(54) СЛЕДЯЩАЯ СИСТЕМА

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1980 |
|
SU924662A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Следящая система | 1983 |
|
SU1123019A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| Следящий привод стабилизации бортовой и килевой качки | 2020 |
|
RU2766552C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Следящий электропривод | 1990 |
|
SU1764031A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2015 |
|
RU2621716C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2014 |
|
RU2580823C2 |
I
Изобретение относится к следящим системам автоматического управления и может быть использовано в машиностроении, металлургической, химической промышленностях, например в приводах механизмов прокатных станов, металлорежущих станков и т. д.
Известна следящая система, состоящая из последовательно включенных преобраг зователей величин, регуляторов пути, скорости тока, причем на вход преобразователя величин подаются сигналы задания и обратной связи по положению, на вход регулятора скорости - сигнал с выхода регулятора пути и сигнал обратной связи по скорости, на вход регулятора тока - сигнал с выхода регулятора скорости и сигнал обратной связи по току, а выход регулятора тока включен на вход силовой части электропривода 1.
Недостатком известной системы является чрезвычайно низкая точность при наличии параметрических и внещних возмущений.
Известна следящая система, содержащая задатчик пути, задатчик скорости, два элемента сравнения, усилитель, исполнительный электродвигатель, редуктор, датчик пути и датчик скорости 2.
Однако система хотя и обладает более высокой, по сравнению с 1, точностью
регулирования, все же не в состоянии обеспечить требуемую точность регулирования при наличии существенных параметрических и энещних возмущений.
Наиболее близкой к предлагаемой по технической сущности является следящая система, содержащая задатчик пути, выход которого через первый элемент сравнения соединен с первым входом сумматора, а через последовательно соединенные нелинейное корректирующее устройство, первый
функциональный преобразователь и второй элемент сравнения - со вторым входом сумматора, выход которого соединен со входом исполнительного электродвигателя, первый выход которого через датчик скорости соединен со вторым входом второго элемента сравнения, а через последовательно соединенные силовой редуктор и датчик пути - со вторым входом первого элемента сравнения 3.
Однако система имеет большую чувстительносуть к изменениям параметров объкта управления и внешним возмущениям, то приводит к резкому снижению точности егулирования при наличии указанных возуш.ений.5
Цель изобретения. - повышение точности ледяшей системы при наличии параметриеских и внешних возмушений.
Поставленная цель достигается тем, что системе установлены датчик тока, второй ункциональный преобразователь и третий лемент сравнения, первый вход которого ерез второй функциональный преобразоваель соединен с выходом первого функционального преобразователя, второй вход через датчик тока - со вторым выходом ,5. исполнительного электродвигателя, а выход - с третьим входом сумматора.
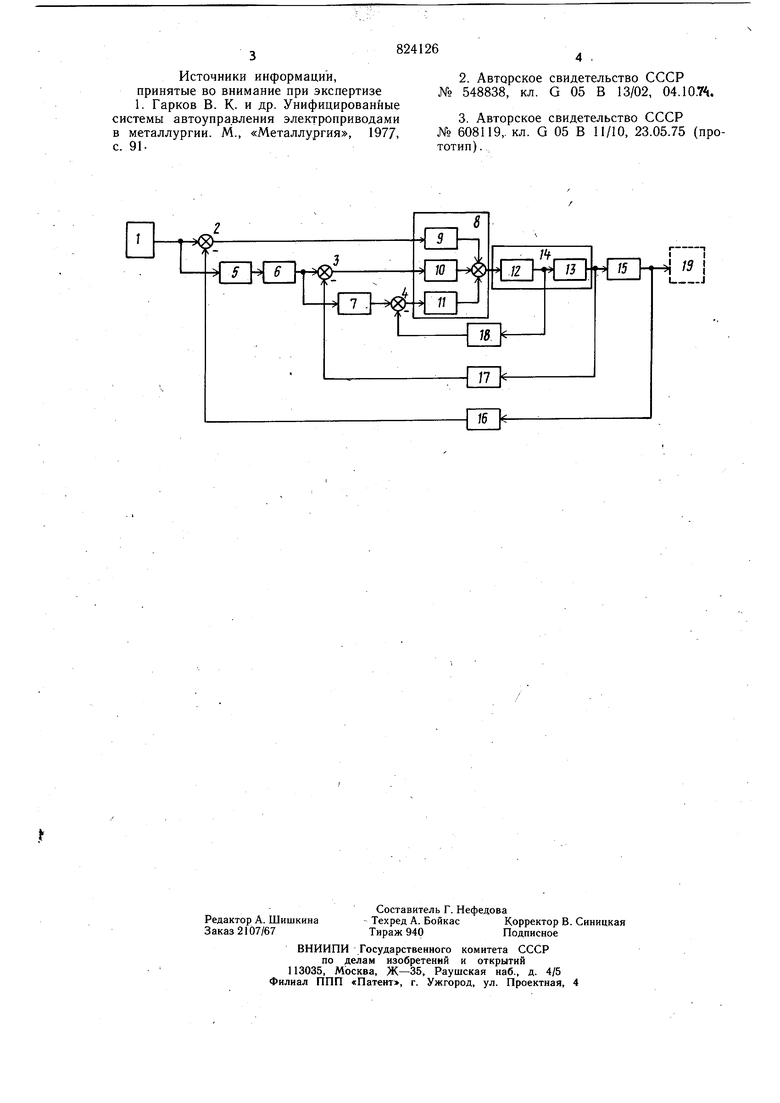
На чертеже изображена функциональная схема предлагаемой системы.
Устройство содержит задатчик 1 пути, пepвь й, второй и третий элементы 2 - 4 20 сравнения, нелинейное корректируюш,ее устройство 5, первый и второй функциональные преобразователи 6 и 7, сумматор 8 , масштабируюшие звенья 9 - 11 , электромагнитную часть исполнительного электродви- . гателя 12, электромеханическую часть исполнительного электродвигателя 13, исполнительный электродвигатель 14, силовой редуктор 15, датчик 16 пути, датчик 17 скорости, датчик 18 тока, объект 19, на выходе i-oro функционального блока, сигнал зо равен Ui,.
Система работает следующим образом.
Задатчик 1 пути формирует сигнал задания Ui, который в элементе 2 сравнения сравнивается с сигналом Uie датчика 16 пути. Сигнал рассогласования по пути Uj с выхода элемента 2 сравнения поступает на первый вход сумматора 8. Сигнал задания Ut поступает также на вход нелинейного корректирующего устройства 5, которое представляет собой нелинейное звено типа звена выделения модуля или звена возведение в четную степень. На выходе нелинейного корректирующего устройства формируется сигнал , который поступает на вход первого функционального преобразователя 6. Первый функциональный 45 преобразователь 6 является динамическим звеном, характеристики которого выбираются в зависимости от требований к динамике следящей системы, и служит для формирования сигнала задания по скорости Ue, который в элементе 3 сравнения сравнивается с текущим значением сигнала UIT с выхода датчика 17 скорости. Сигнал Us с выхода элемента 3 сравнения поступает на -второй вход сумматора 8. Сигнал задания по скорости Ue поступает также на вход jj второго функционального преобразователя Z Второй функциональный преобразователь 7 является динамическим звеном, характеристики которого выбираются в зависимости от требований к динамике следящей системы, и служит для формирования сигнала задания по току Uy, который в элементе 4 сравнения сравнивается с текущим значением сигнала Un с выхода датчика 18 тока Сигнал U4 с выхода элемента 4 сравнения поступает на третий вход усилителя 8, на выходе которого формируется сигнал управления.
Us KeUi + KioU3 + Ki. U4,
где Кз, Kio, Kii-коэффициенты масштабирования.
Сигнал управления Ug поступает на вход исполнительного электродвигателя 14, который через силовой регулятор 15 разворачивает нагрузку (объект 19 регулирования).
Задание по всём остальным контролируемым параметрам системы может быть введено аналогичным образом.
Использование предлагаемой системы позволяет строить высококачественные промышленные электроприводы, обеспечивающие повышение точности на 2, по сравнению с известными и обладающие свойствами малой чувствительности к параметрическим и внешним возмущениям, т. е. электроп|р.иводы, неизменно формируюшие заданный переходной процесс в условиях постоянно меняющихся параметров объекта и внешних возмущений в диапазоне ±8% от номинальных значений, что особенно важно для построения систем точного позиционирования.
Формула изобретения
Следящая система, содержащая задатчик пути, выход которого через первый элемент сравнения соединен с первым входом сумматора,, а через последовательно соединенные нелинейные корректирующее устройство, первый функциональный преобразователь и второй элемент сравнения - со вторым входом сумматора, выход которого соединен со входом исполнительного электродвигателя, первый Bbixojf которого через датчик скорости соединен со вторым входом второго элемента сравнения, а через последовательно соединенные силовой редуктор и датчик пути - со вторым входом первого элемента сравнения, отличающаяся тем, что, с целью повышения точности системы, в ней установлены датчик тока, второй функциональный преобразователь и третий элемент сравнения, первый вход которого через второй функциональный преобразователь соединен с выходом первого функционального преобразователя, второй вход через датчик тока - со вторым выходом исполнительного электродвигателя, а выход - с третьим входом сумматора.
Источники информации, принятые во внимание при экспертизе 1. Гарков В. К- и др. Унифицированные системы автоуправления электроприводами в металлургии. М., «Металлургия, 1977, с. 91.
№ 548838, кл. G 05 В 13/02, 04.10.7.
№ 608119,, кл. G 05 В 11/10, 23.05.75 (прототип) .
