ел
о to
о:)
ФигЛ
Изобретение относится к машиностроению и приборостроению и может быть использовано в захватах загрузочных устройств технологического оборудования.
Целью изобретения является расширение технологических возможностей.
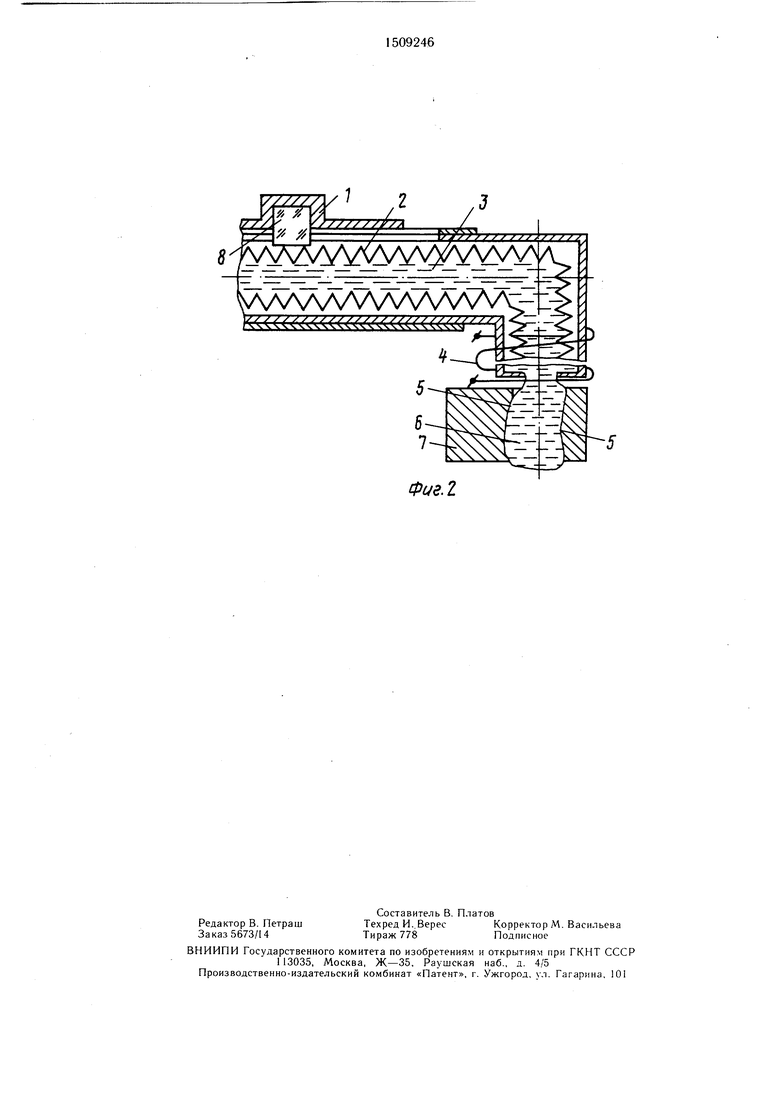
На фит. 1 изображен схват, обший вид; на фиг. 2 - то же, вариант выполнения с телескопическим корпусом.
Схват манипулятора содержит корпус 1 с внутренней полостью 2 (гидромагистраль), заполненной магнитной жидкостью 3. На концах корпуса схвата имеются электрические обмотки 4 и зажимные элементы 5, выполненные в виде эластичных баллонов, заполненных рабочей средой 6, представляю- niefi собой немагнитную жидкость, не смешивающуюся с магнитной жидкостью и не встунаюпхую с ней в химическую реакцию. Цифрой 7 обозначена захватываемая деталь.
Корпус 1 может быть выполнен телескопическим, снабженным для фиксации на различные межцентровые расстояния фиксатором 8 положения, при этом стенки гидро- маг истрали выполняются гофрированными.
Схват манипулятора работает следую- П1,им образом.
Цервоначально один из зажимных элементов схвата подводится к захватываемой детали 7. Носле помеп ения зажимного элемента в отверстие захватываемой детали включается устройство (не показано), питаю- Hiee близлежащую к баллону электромагнитную обмотку 4. Цротекание по ней электрического тока создает неоднородное по всей д.чине гидромагистрали 2 магнитное поле с максимумом напряженности, его в месте крепления зажимного элемента 5 к корпусу 1. .Магнитная жидкость 3 в неоднородном магнитном поле под действием магнитной силы втягивается в область наибольшей напряженности этого поля и, воздействуя на рабочую среду 6, производит заполнение этой средой э.шстичной оболочки. Расширение оболочки приводит к зажиму детали 7. Причем перекачка магнитной жидкости 3 в об- . lacTb наибольи1ей напряженности способствует поднятию по гидромагистрали 2 рабочей среды 6, заполняющей свободную от деталей эластичную оболочку.
Помещение детали 7 на позицию разгрузки сопровождается одновременным введением второго свободного зажимного элемента внутрь следующей захватываемой детали. Производится обесточивание левой (фиг. 1) электромагнитной обмотки 4, и подключается правая обмотка. Теперь максимум напряженности магнитного поля приходится на место крепления правого зажимного элемента 5 к корпусу 1. Перетекание в эту об0 ласть магнитной жидкости 3 приводит к заполнению правой эластичной оболочки рабочей средой 6, ее расширению и захвату детали 7, а также к вытеканию рабочей среды из левой эластичной оболочки, уменьшению ее объема и освобождению захваченной детали.
Таким образом, перетекание магнитной жидкости по гидромагистрали под действием неоднородного магнитного поля приводит
0 к одновременному наполнению упругим наполнителем одной эластичной оболочки и освобождению другой. Таки.м образом, в одно и то же время происходит захват детали одним зажимным элементом и освобождение
r от детали другого элемента. В результате повышается производительность работы схвата за счет сокращения сум.марного времени, идущего на захват, перенос и освобождение деталей.
30
Формула изобретения
. Схват манипулятора, содержащий корпус с внутренней полостью, заполненной магнитопроводной жидкостью, электрическую обмотку, охватывающую корпус, и зажимной эле.мент, установленный на корпусе и выполненный в виде эластичного баллона, заполненного немагнитной жидкостью, отличающийся тем, что, с целью расщирения технологических возможностей, схват снабжен дополнительны.м зажимны.м эле.менто.м и соответствующей дополнительной электрической обмоткой, при этом полости зажимных эле.ментов соединены между собой через полость корпуса.
2. Схват по п. 1, отличающийся тем, что
корпус схвата выполнен телескопическим.
|X/////JX Уу УУУУУ
2
ZZ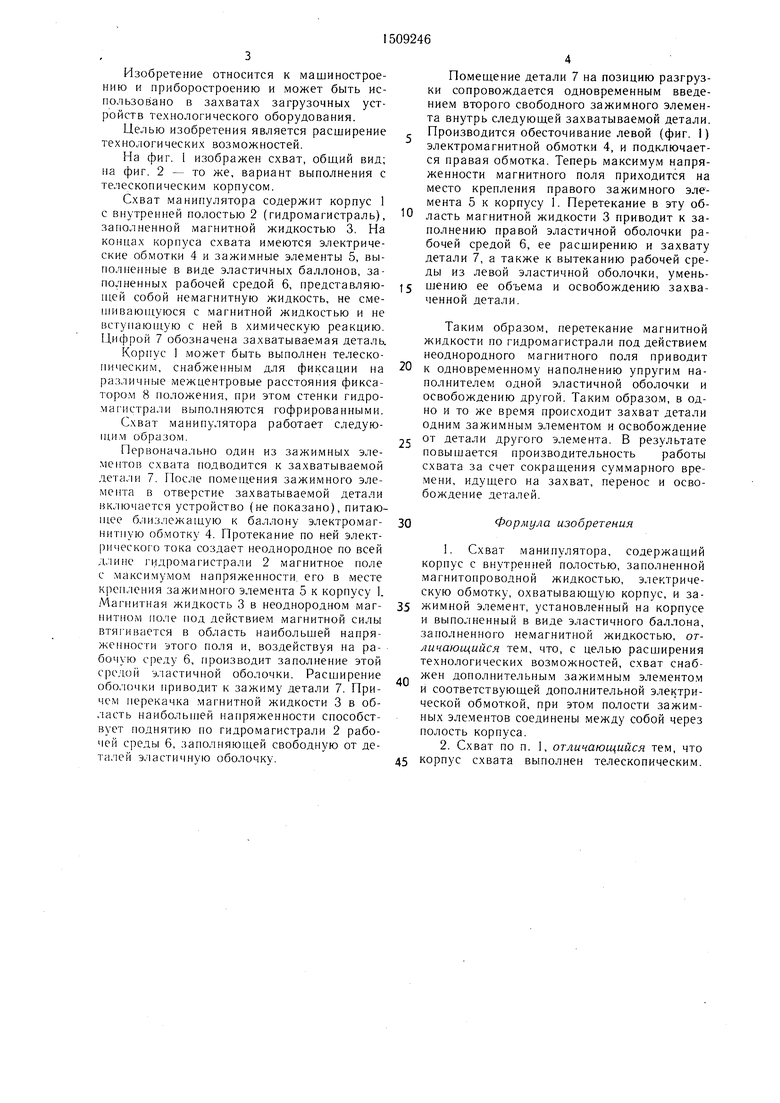
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора В.Г.Вохмянина | 1988 |
|
SU1627402A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1764991A1 |
| Электромагнитное захватное устройство | 1990 |
|
SU1745541A1 |
| Схват манипулятора | 1985 |
|
SU1321583A1 |
| Схват манипулятора | 1985 |
|
SU1276486A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1764992A1 |
| Схват манипулятора В.Г.Вохмянина | 1986 |
|
SU1366394A1 |
| Схват манипулятора В.Г.Вохмянина | 1986 |
|
SU1357221A1 |
| Захватное устройство | 1990 |
|
SU1775290A1 |
| Схват промышленного робота В.Г.Вохмянина | 1990 |
|
SU1756144A1 |
Изобретение относится к машиностроению и приборостроению и может быть использовано в захватах загрузочных устройств технологического оборудования. Целью изобретения является расширение технологических возможностей. Для этого корпус 1 с установленными на нем электрической обмоткой 4 и зажимным элементом 5, заполненным немагнитной жидкостью 6, снабжен дополнительным зажимным элементом и соответствующей дополнительной электрической обмоткой. При этом зажимные элементы 5 соединены между собой гидромагистралью 2, заполненной магнитной жидкостью 3. Корпус 1 схвата выполнен телескопическим. Цикл работы схвата основан на попеременном включении питания электрических обмоток 4, причем при включении одной обмотки вторая обесточивается. Включенная обмотка создает магнитное поле, в область которого втягивается магнитная жидкость, вытесняя немагнитную в эластичный баллон. Из второго баллона немагнитная жидкость, наоборот, вытекает в гидромагистраль, компенсируя возникающий недостаток магнитной жидкости. Таким образом, при захвате детали 7 одним из зажимных элементов 5, другой зажимной элемент в это же время освобождает ранее захваченную деталь. 1 з.п. ф-лы, 2 ил.
Фиг.г
| Схват манипулятора В.Г.Вохмянина | 1986 |
|
SU1366394A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
