Фиг.1
, «v
Изобретение относится к машиностроению, в частности к устройствам для аыпол- нения вспомогательных операций, связанных с изменением расположения деталей в пространстве, а конкретнее к конструкциям захватных органов роботов - манипуляторов.
Известен схват промышленного робота, содержащий корпус, на котором расположен зажимной элемент, выполненный в виде винтовой пружины; связанный с приводным элементом линейного перемещения посредством опорного кольца.
Недостатком этого устройства является его сложность, так как требуется использование специального привода.
Известен схват промышленного робота, содержащий цилиндрический корпус из немагнитного материала, внутри которого расположено средство для деформирования эластичного баллона, электромагнитную катушку и эластичный баллон, установленные на корпусе, при этом баллон выполнен в виде тора и заполнен рабочим телом
Недостатком этого устройства является его сложность, а также большие габариты из-за необходимости использования специального средства для деформации эластичного баллона.
Наиболее близким по технической сущности к предлагаемому является схват про- мышленного робота, содержащий захватный орган и средство деформации захватного органа, на котором расположена обмотка управления, причем захватный орган и его средство деформации выполнены в виде эластичных баллонов, заполненных рабочей средой.
Недостатком этого схвата промышленного робота является сложность конструкции,
Целью изобретения является упрощение конструкции схвата.
Поставленная цель достигается тем, что в схвате промышленного робота, содержащем захватный орган, на котором расположена обмотка управления, причем захватный орган и его средство деформации выполнены в виде эластичных баллонов, заполненных рабочей средой, захватный орган выполнен в виде тора, а средство деформации расположено внутри него, при зтом продольная ось средства деформации расположена в поперечной плоскости симметрии захватного органа, а обмотка управления выполнена в виде двух катушек, включенных вйтречно друг другу.
На фиг 1 схематично представлен пред- пагаемый схват промышленного робота с
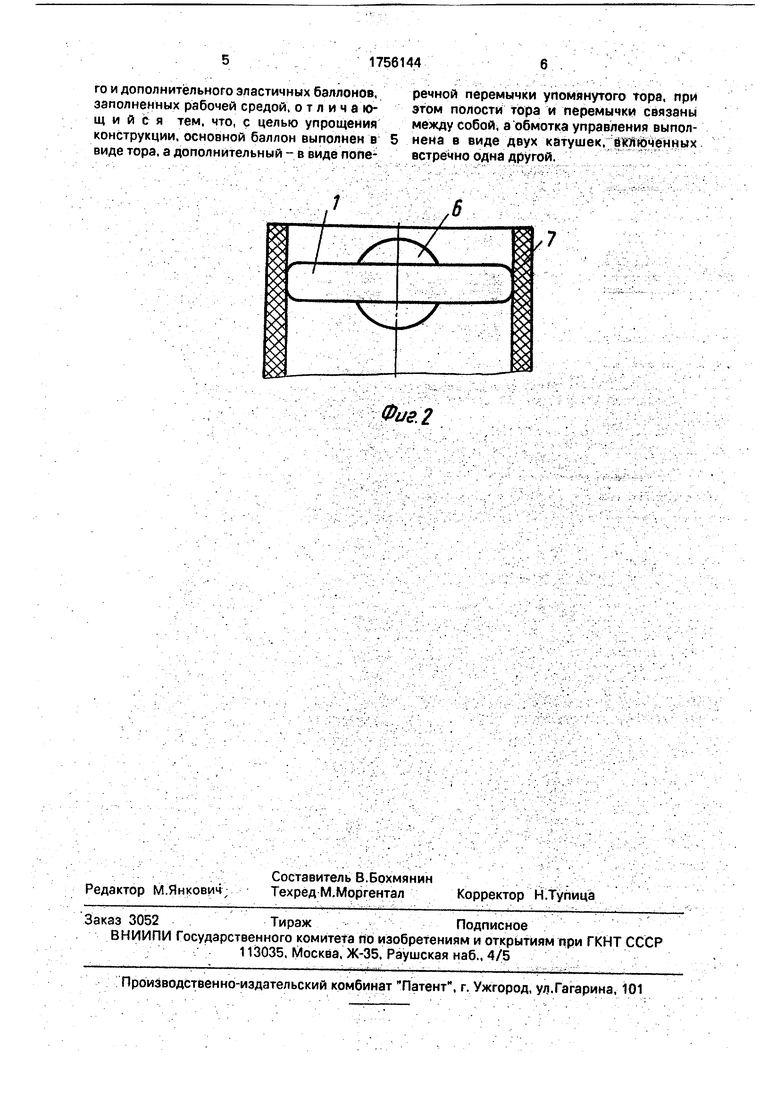
обесточенной обмоткой на фиг 2 - то же, с захваченной деталью
Схват промышленного робота содержит захватный орган 1, выполненный а виде основного эластичного баллона, заполненного рабочей средой 2, в качестве которой использована ферромагнитная жидкость. Захватный орган выполнен в виде тора Схват содержит так же средство деформа0 ции 3 захватного органа, выполненное в виде дополнительного эластичного баллона и представляющее собой поперечную перемычку упомянутого тора. При этом полости тора и перемычки связаны между собой На
5 средстве деформации 3 расположена обмотка управления, выполненная в виде двух катушек 4 и 5, включенных встречно друг другу. Катушки 4 и 5 расположены на каркасе б (каркас 6 на фиг.1 не показан) В каче0 стве эластичных баллонов, заполненных рабочей средой 2,может быть использована магнитопроводная резина, например на основе каучука с ферритовым наполнителем Позицией 7 показана захватываемая де5 таль.
Схват промышленного робота работает следующим образом
Для захвата детали 7 схват вводят во внутреннюю полость детали и на обмотку
0 управления подают напряжение источника питания. Под действием магнитного поля ферромагнитные гранулы концентрируются внутри катушек 4 и 5 (под гранулами понимается рабочая среда 2, образуя миниатюр5 ные постоянные магниты В результате взаимодействия магнитных потоков катушек 4 и 5, что обеспечивается соответствующим подключением катушек к источнику питания - катушки включены встречно друг
0 другу - при этом катушки 4 и 5 могут быть включены или параллельно, или последовательно (на фиг.1 показано последовательное включение катушек 4 и 5), возникают силы взаимного отталкивания, вызывающие
5 растяжение основного эластичного баллона и захват детали 7.
Освобождение детали 7 осуществляется путем снятия напряжения с обмотки управления
0 Простота конструкции, малые габариты является достоинством и преимуществом предлагаемого технического решения по сравнению с аналогами
Ф о р м у л а и з о б р е т е н и я
5 Схват промышленного робота, содержащий захватный орган и средство деформации захватного органа, на котором расположена обмотка управления, причем захватный орган и средство деформации выполнены соответственно в виде основного и дополнительного эластичных баллонов, заполненных рабочей средой, о т л и ч a tout и и с я тем, что, с целью упрощения конструкции, основной баллон выполнен в виде тора, а дополнительный - в виде поперечной перемычки упомянутого тора, при этом полости тора и перемычки связаны между собой, а обмотка управления выполнена в виде двух катушек, включенных встречно одна другой.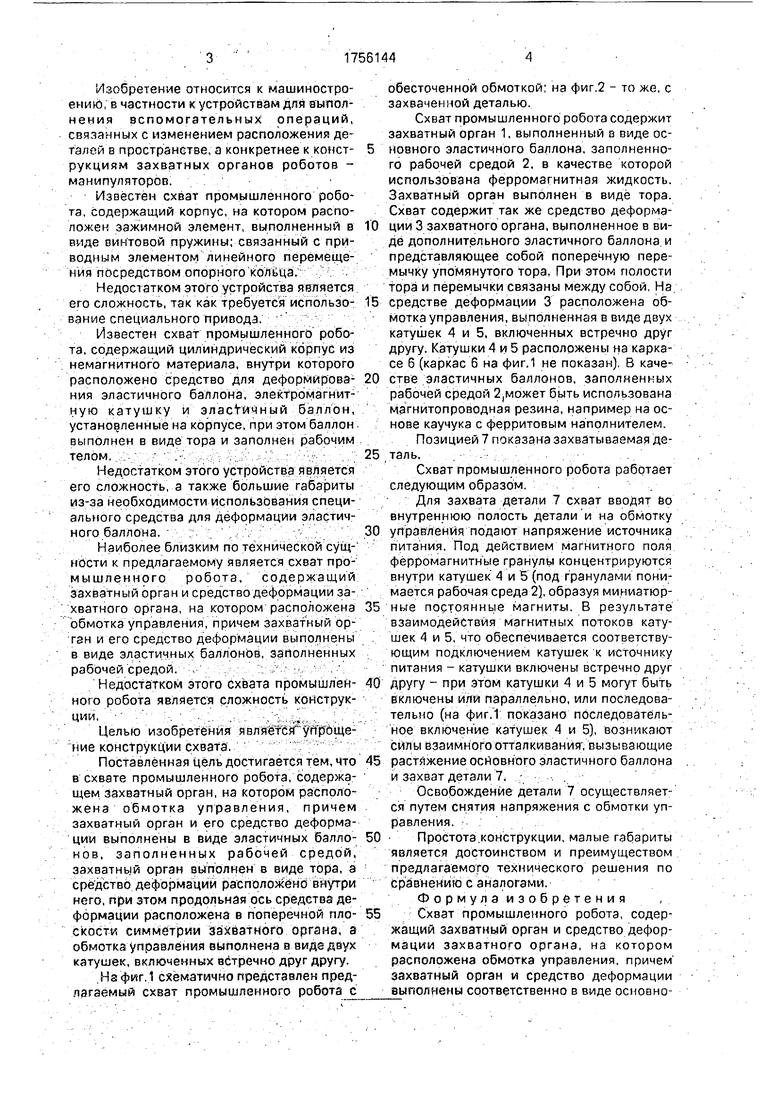
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1764992A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1764991A1 |
| Схват манипулятора В.Г.Вохмянина | 1988 |
|
SU1627402A1 |
| Захватное устройство | 1990 |
|
SU1775290A1 |
| Схват манипулятора В.Г.Вохмянина | 1986 |
|
SU1357221A1 |
| Схват манипулятора | 1991 |
|
SU1811479A3 |
| Электромагнитное захватное устройство | 1990 |
|
SU1745541A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1761462A1 |
| Схват промышленного робота В.Г.Вохмянина | 1987 |
|
SU1451006A1 |
| Схват манипулятора | 1985 |
|
SU1276486A1 |
Использование: в машиностроении, 8 конструкциях ззхааткых органов промышленных роботов. Сущность изобретения: схват содержит захватный орган 1, средство 3 его деформации и обмотку управления. Захватный орган и средство деформаций выполнены соответственно в виде основного и дополнительного эластичных баллоноб. Эластичные баллоны заполнены рабочей о 4iff JMf«- J 04 -, -г- -х-те - средои 2. Основной баллон еьтолнен в виде тора, а дополнительный - в вйдеГпЪпёреч- ной перемычки упомянутого тора. Полости тора и перемычки связаны между сШой. Обмотка управления расположена на дополнительном баллоне и выполнена в вмде двух катушек 4 и 5 Катушки включены встречно друг другу. В качестве рабочей среды использована ферромагнитная жидкость. Для захвата детали схват вводят во внутреннюю полость детали. На обмотку управления подают питание. В результате взаимодействия магнитных потоков катушек 4 и 5 в рабочей среде возникают силы взаимного отталкиваний, вызыва(бщме растяжение основного эластичного баллона и захват детали. 2 ил.- - 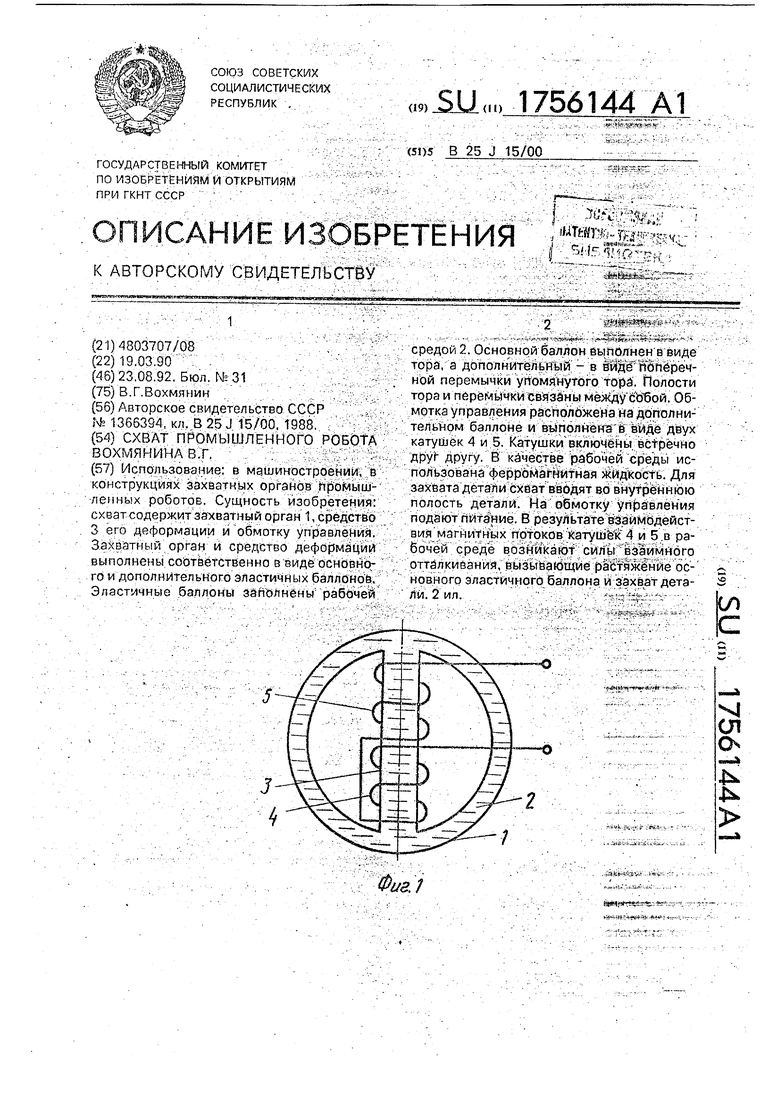
Фиг. 2
| Схват манипулятора В.Г.Вохмянина | 1986 |
|
SU1366394A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
