Изобретение относится к машиностроению, в частности к устройствам для выполнения вспомогательных операций, связанных с изменением положения деталей в пространстве.
Известен схват манипулятора, содержащий корпус, оболочку, заполненную рабочим телом.
Низкая надежность является недостатком этого схвата.
Известен схват манипулятора, содержащий корпус, эластичный баллон, заполненный рабочим телом, и электрическую обмотку.
Ограниченные функциональные возможности является недостатком этого схвата.
Наиболее близким по технической сущности к предлагаемому является схват манипулятора, содержащий корпус из немагнитного материала, электрическую обмотку и захватный элемент, выполненный
в виде замкнутого эластичного баллона, заполненного магнитопроводной жидкостью.
Сложность конструкции является недостатком этого схвата.
Цель изобретения - упрощение конструкции.
Поставленная цель достигается тем, что в схвате манипулятора, содержащем корпус из немагнитного материала, электрическую обмотку и захватный элемент, выполненный в вид замкнутого эластичного баллона, заполненного магнитопроводной жидкостью, корпус выполнен в виде тора, внутри которого соответствующим образом расположена электрическая обмотка, при этом упомянутый баллон также выполнен в виде тора, а корпус расположен внутри баллона соосно с ним.
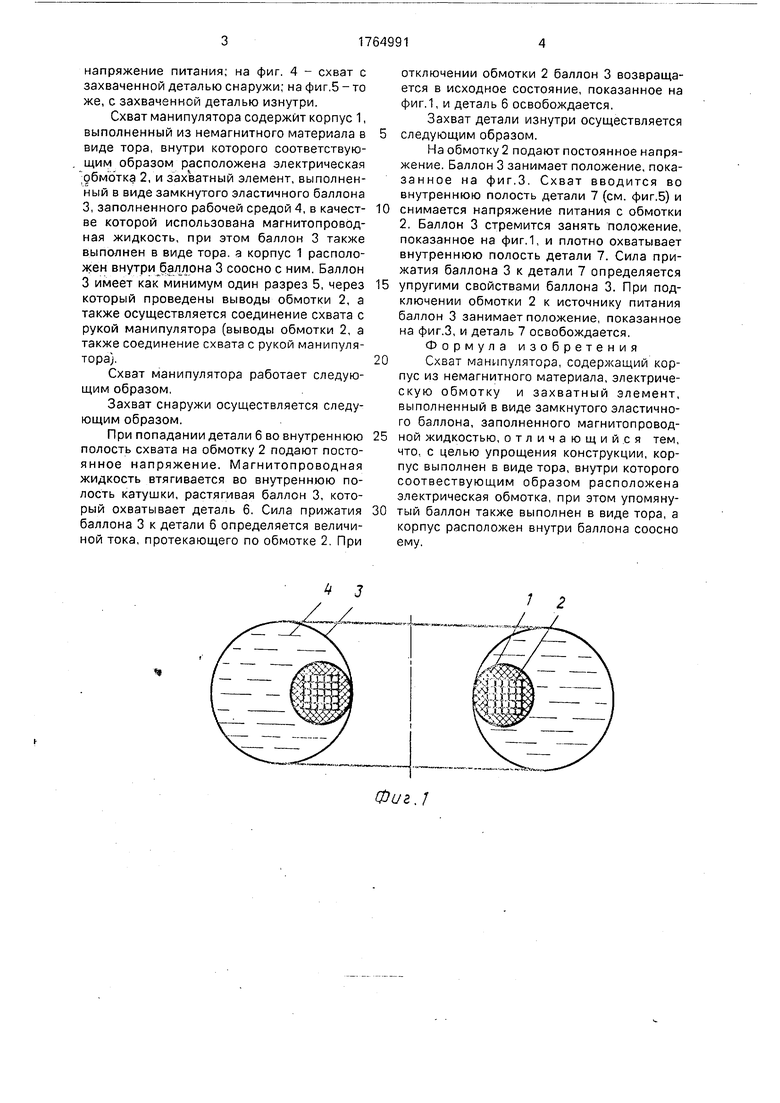
На фиг.1 изображен предлагаемый схват манипулятора при обесточенной обмотке; на фиг.2 - то же, вид сверху; на фиг.З - схват в момент, когда на обмотку подано
VI
О
- о о
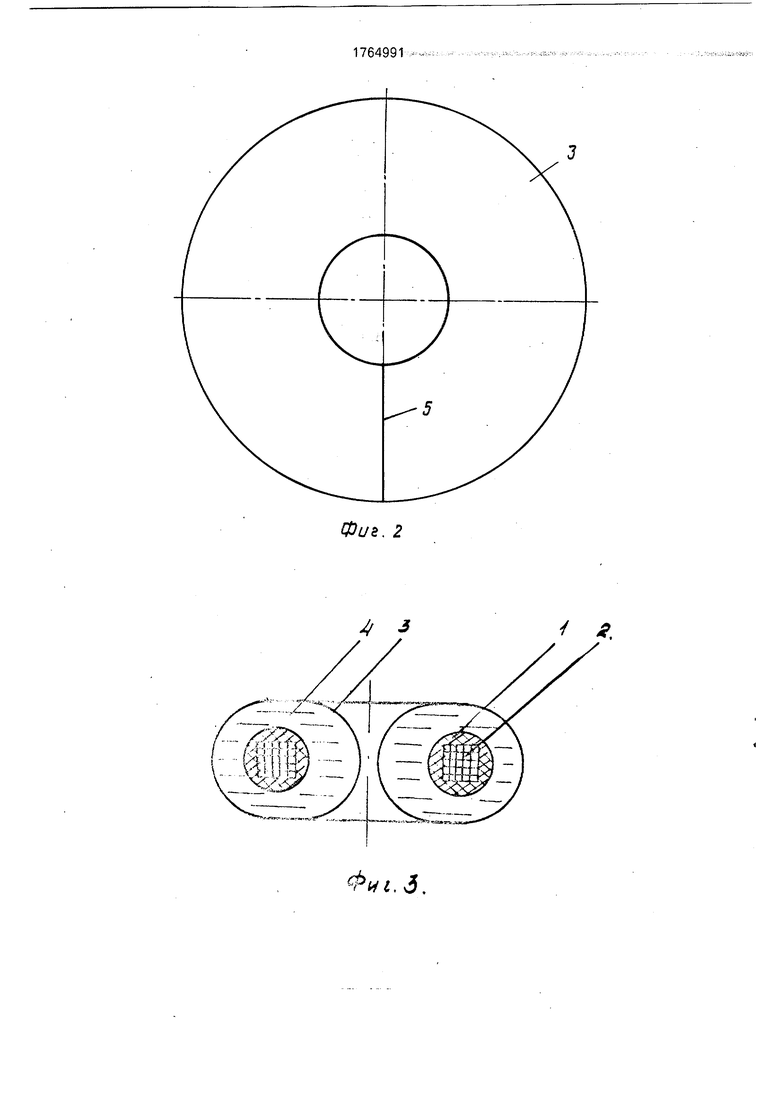
напряжение питания; на фиг. 4 - схват с захваченной деталью снаружи; на фиг.5 - то же, с захваченной деталью изнутри.
Схват манипулятора содержит корпус 1, выполненный из немагнитного материала в виде тора, внутри которого соответствующим образом расположена электрическая обмотка 2, и захватный элемент, выполненный в виде замкнутого эластичного баллона 3, заполненного рабочей средой 4, в качест- ве которой использована магнитопровод- ная жидкость, при этом баллон 3 также выполнен в виде тора, а корпус 1 расположен внутри Дал л о на 3 соосно с ним. Баллон 3 имеет как минимум один разрез 5, через который проведены выводы обмотки 2, а также осуществляется соединение схвата с рукой манипулятора (выводы обмотки 2, а также соединение схвата с рукой манипулятора).
Схват манипулятора работает следующим образом,
Захват снаружи осуществляется следующим образом.
При попадании детали 6 во внутреннюю полость схвата на обмотку 2 подают постоянное напряжение. Магнитопроводная жидкость втягивается во внутреннюю полость катушки, растягивая баллон 3, который охватывает деталь 6. Сила прижатия баллона 3 к детали 6 определяется величиной тока, протекающего по обмотке 2. При
отключении обмотки 2 баллон 3 возвращается в исходное состояние, показанное на фиг.1, и деталь 6 освобождается.
Захват детали изнутри осуществляется следующим образом.
На обмотку 2 подают постоянное напряжение. Баллон 3 занимает положение, пока- занное на фиг.З. Схват вводится во внутреннюю полость детали 7 (см. фиг.5) и снимается напряжение питания с обмотки 2. Баллон 3 стремится занять положение, показанное на фиг.1, и плотно охватывает внутреннюю полость детали 7. Сила прижатия баллона 3 к детали 7 определяется упругими свойствами баллона 3. При подключении обмотки 2 к источнику питания баллон 3 занимает положение, показанное на фиг.З, и деталь 7 освобождается.
Формула изобретения
Схват манипулятора, содержащий корпус из немагнитного материала, электрическую обмотку и захватный элемент, выполненный в виде замкнутого эластичного баллона, заполненного магнитопровод- ной жидкостью, отличающийся тем, что, с целью упрощения конструкции, корпус выполнен в виде тора, внутри которого соотвествующим образом расположена электрическая обмотка, при этом упомянутый баллон также выполнен в виде тора, а корпус расположен внутри баллона соосно ему.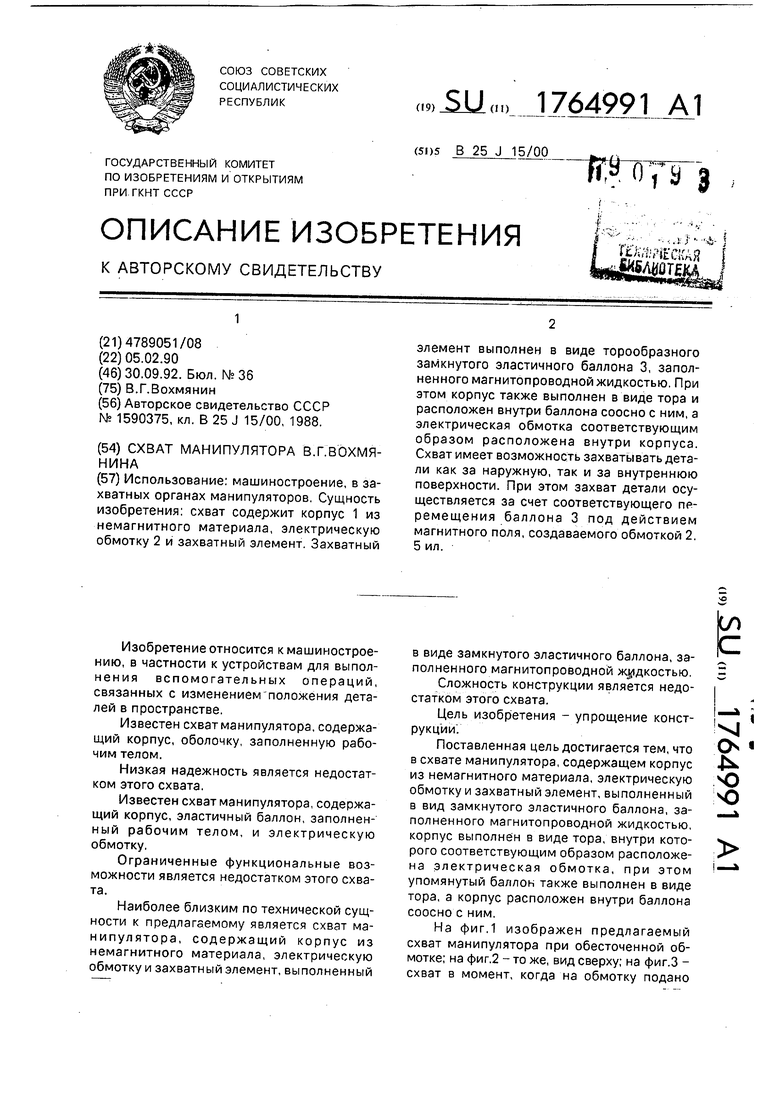
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитное захватное устройство | 1990 |
|
SU1745541A1 |
| Захватное устройство | 1990 |
|
SU1775290A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1761462A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1764992A1 |
| Схват манипулятора | 1985 |
|
SU1321583A1 |
| Схват промышленного робота В.Г.Вохмянина | 1990 |
|
SU1756144A1 |
| Схват манипулятора В.Г.Вохмянина | 1986 |
|
SU1366394A1 |
| Схват манипулятора В.Г.Вохмянина | 1988 |
|
SU1627402A1 |
| Схват манипулятора | 1985 |
|
SU1276486A1 |
| Схват манипулятора | 1991 |
|
SU1811479A3 |
Использование: машиностроение, в захватных органах манипуляторов. Сущность изобретения: схват содержит корпус 1 из немагнитного материала, электрическую обмотку 2 и захватный элемент. Захватный элемент выполнен в виде торообразного замкнутого эластичного баллона 3, заполненного магнитопроводнойжидкостью. При этом корпус также выполнен в виде тора и расположен внутри баллона соосно с ним, а электрическая обмотка соответствующим образом расположена внутри корпуса. Схват имеет возможность захватывать детали как за наружную, так и за внутреннюю поверхности. При этом захват детали осуществляется за счет соответствующего перемещения баллона 3 под действием магнитного поля, создаваемого обмоткой 2. 5 ил.
4 J
Фиг.
Фиг. 2
Фч1,3
4 3
.
fi ,
1|(l
У
Фиг. 4.
.Ј,
| Схват манипулятора В.Г.Вохмянина | 1988 |
|
SU1590375A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
