Изобретение относится к машиностроению и может быть использовано в машинах, имеющих цепные тяговые органы, например скребковые и пластинчатые конвейеры, многочерпаковые цепные экскаваторы ковшовые элеваторы.
Известен уравнительный механизм для цепных тяговых органов транспортирующих машин, включающий тяговую и приводную звездочки, закрепленные на общем валу, ведущую звездочку, приводную цепь со звеньями и осями, причем приводная цепь выполнена многорядной с разным шагом звеньев, а оси ряда с большим шагом совмещены с осями с меньшим шагом Кроме того, больший шаг ряда цепи равен шагу приводной звездочки, а меньший шаг ряда цепи равен шагу ведущей звездочки
Вследствие геометрического подобия и взаимного расположения приводной и тяговой звездочек колебания движения тягового
цепного органа совершаются в противофа- зе с колебаниями вращения приводного вала и движение тягового цепного органа становится практически равномерным. Все это справедливо, если не принимать во внимание то, что шарниры звеньев тяговой и приводной цепей при зацеплении находятся по разные стороны зубьев тяговой и приводной звездочек. А поэтому, если приводная и тяговая звездочки закреплены на общем валу так, что их проекции на плоскость, перпендикулярную оси приводного вала, совпадают, то проекции на эту плоскость точки контакта шарнира звена приводной цепи с зубом приводной звездочки и точки контакта шарнира звена тяговой цепи с зубом тяговой звездочки не совпадают и будут отстоять друг от друга относительно центра приводного вала на некоторый угол Это приводит к тому, что момент времени начала выхода из зацепления звена приводё
s| Os 01
;0
ic
ной цепи с зубом приводной звездочки не совпадает с моментом времени начала входа в зацепление звена тяговой цепи с зубом тяговой звездочки.
В результате колебания цепного тягового органа совершаются не точно в противо- фазе с колебаниями общего вала и не полностью устраняются пульсации цепного тягового органа.
Известен уравнительный механизм, в котором совпадение момента времени начала выхода из зацепления звена приводной цепи с зубом приводной звездочки и момента времени начала входа в зацепление звена тяговой цепи с зубом тяговой звездочки достигается сдвигом приводной звездочки вокруг своей оси относительно тяговой звездочки в сторону вращения общего вала на угол /, равный центральному углу между проекциями на плоскость, перпендикулярную общему валу, точки контакта звена приводной цепи с зубом приводной звездочки и точки контакта звена тяговой цепи с зубом тяговой звездочки.
Однако при массовом производстве конвейеров с уравнительным механизмом затруднительно с высокой точностью выдержать требуемый угол сдвига приводной звездочки вокруг своей оси относительно тяговой звездочки вследствие технологических неточностей при изготовлении цепей, звездочек и при нарезании шпоночных пазов. Результаты экспериментальных исследований показывают, что отклонения действительных значений угла сдвига от требуемого, соответствующего оптимальному режиму работы уравнительного механизма даже в малом диапазоне (±1°) значительно снижают эффективность работы уравнительного механизма
Целью изобретения является упрощение процесса настройки уравнительного механизма на оптимум.
Это достигается тем, что в уравнительном механизме для цепных тяговых органов транспортирующих машин включающих приводную и тяговую звездочки, установленные на общем валу так, что их проекции на плоскость, перпендикулярную общему валу, полностью совпадают многорядную ведущую звездочку с мелким шагом зубьев, установленную на валу редуктора, многорядную цепь с разным шагом в рядах, охватывающую ведщую и приводную звездочки, согласно изобретению редуктор с ведущей звездочкой установлен с возможностью перемещения ведущей звездочки по дуге окружности с центром на геометрической оси приводного вала и в направлении, обратном вращению общего вала.
Поворот ведущей звездочки относительно приводной звездочки именно в плоскости, перпендикулярной общему валу, позволяет сохранить возможность нормального зацепления звеньев многорядной приводной цепи с зубьями ведущей и приводной звездочек. Поворот же в выше0 указанной плоскости ведущей звездочки относительно приводной звездочки в сторону, обратную направлению вращения общего вала, позволяет достичь желаемого эффекта при угле поворота, равном центральному
5 углу между проекциями на плоскость, перпендикулярную общему валу, точки контакта звена приводной цепи с зубом приводной звездочки и точки контакта звена рабочей цепи с зубом рабочей звездочки. В совокуп0 ности сказанное позволяет достичь совпадения момента времени начала выхода из зацепления звена приводной цепи с зубом приводной звездочки и момента времени начала входа в зацепление звена тяговой
5 цепи с зубом тяговой цепи, что соответствует настройке уравнительного механизма на оптимум, за который принимается наибольшая эффективность его работы. Поворот ведущей звездочки на требуемый угол может
0 быть достигнут простыми и общедоступными методами, например, путем подьема эле- ментов привода (электродвигателя и редуктора с закрепленной на тихоходном валу последнего ведущей звездочки) в пло5 скости, перпендикулярной общему валу, на определенную высоту и по дуге окружности с центром на геометрической оси приводного вала. Конструктивно это может быть осуществлено, например, путем установки
0 винтового подъемника на одной стороне редуктора и возможностью поворота его другой стороны в плоскости, перпендикулярной общей оси приводного вала, при этом редуктор вместе с двигателем имеет
5 возможность и горизонтального перемещения для компенсации необходимого перемещения редуктора, связанного с перемещением ведущей звездочки по дуге окружности с центром относительно оси
0 приводного вала.
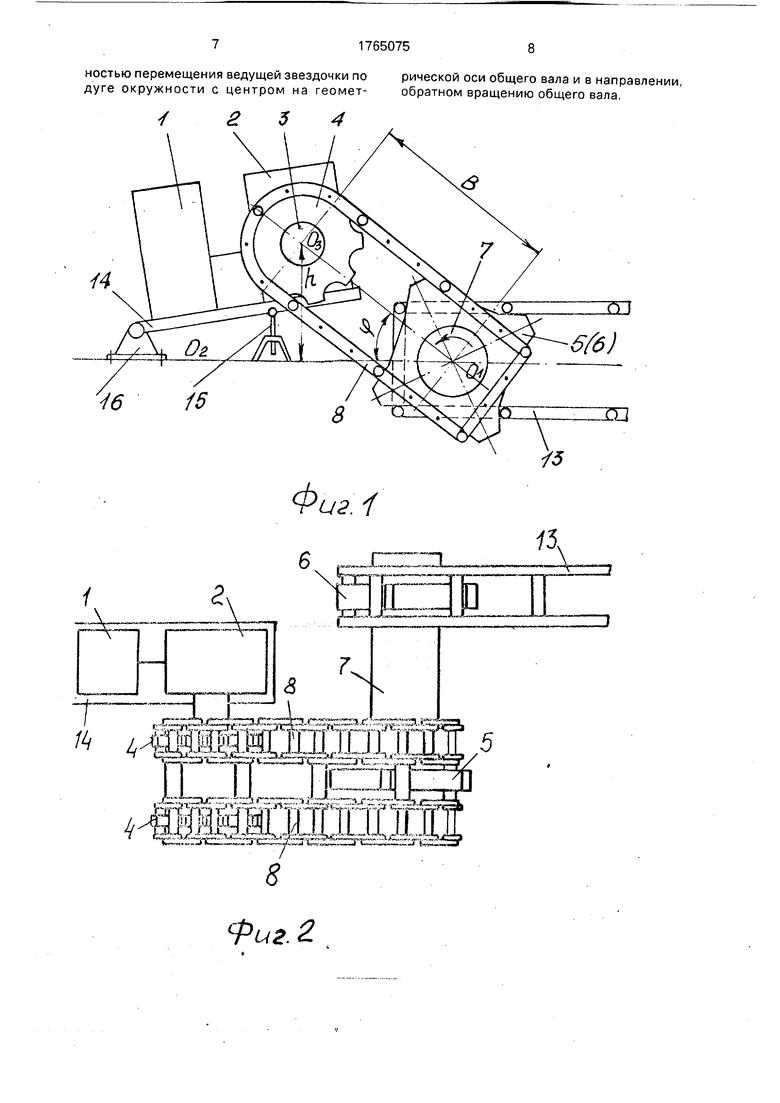
На фиг. 1 изображен привод с уравнительным механизмом транспортирующих машин с цепным тяговым органом, вид спереди; на фиг.2 - то же, вид сверху; на фиг. 3
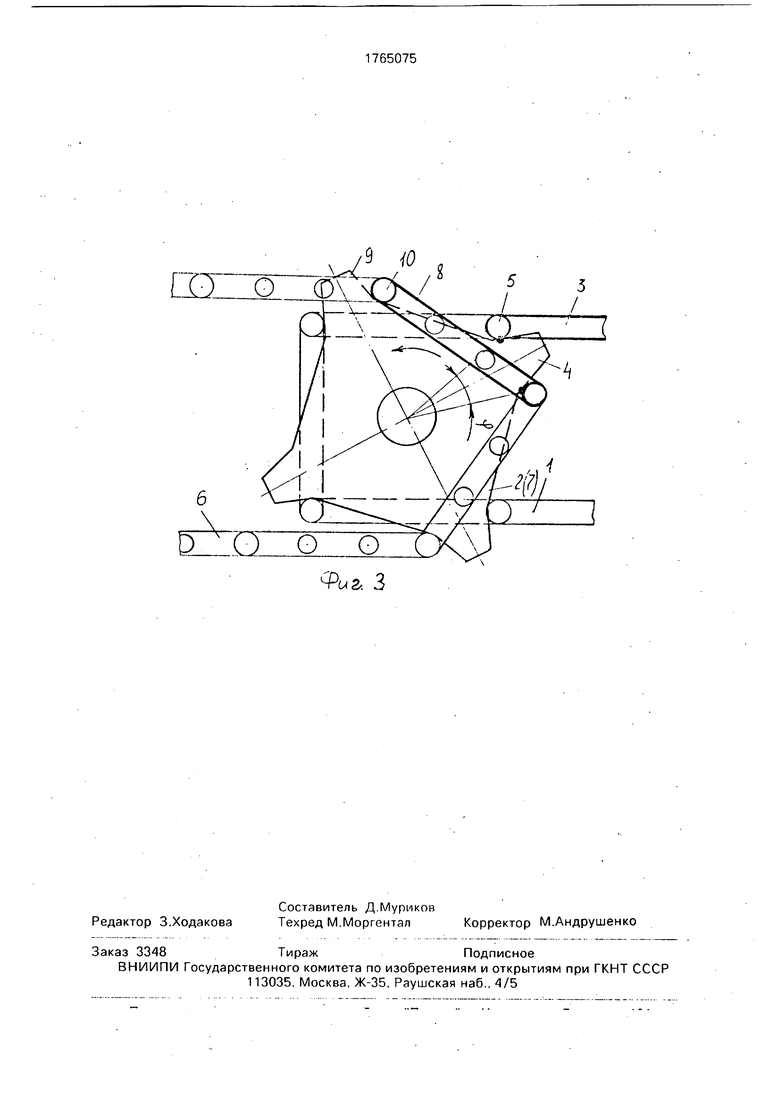
5 проекция приводной и тяговой звездочек на плоскость, перпендикулярную общему валу. Электродвигатель 1 соединен с редуктором 2, на тихоходном валу 3 которого закреплена ведущая звездочка 4, выполненная с малым шагом зубьев Приводная 5
и тяговая 6 звездочки выполнены идентичными и расположены на общем валу 7 так, что их проекции на плоскость, перпендикулярную общему валу 7, совпадают в одну. Приводная цепь 8, охватывающая ведущую
4и приводную 5 звездочки, выполнена многорядной и включает ряды звеньев с большим шагом, равным шагу приводной звездочки 5 и ряды звеньев с меньшим шагом, равным шагу ведущей звездочки 4. Причем ведущая звездочка 4 повернута относительно приводной звездочки 5 в плоскости, перпендикулярной общему валу 7, в сторону, обратную направлению вращения общего вала 7, на угол р, равный центральному углу между проекцией точки контакта 9 звена 10 (на фиг. 3 выделено утолщенной линией) приводной цепи 8 с зубом приводной звездочки 5 и проекцией точки контакта 11 звена 12 тяговой цепи 13с зубом тяговой звездочки 6.
Поворот ведущей звездочки 4 относительно приводной звездочки 5 возможен различными способами, один из которых применительно к схеме расположения элементов привода, показанного на фиг.1 и 2, состоит в следующем.
Основание 14, на котором расположен электродвигатель 1 и редуктор 2, на тихоходном валу которого расположена ведущая звездочка 4, с помощью подъемника 15 имеет возможность поворачиваться относительно шарнира 16 в плоскости, перпендикулярной общему валу 7, и перемещается в горизонтальной плоскости относительно вала 7, при этом ведущая звездочка 4 поворачивается по дуге окружности с центром на геометрической оси приводного вала, так, что угол между осью горизонта OiOa и осью ОчОз, соединяющей центры приводной
5и ведущей 4 звездочек, был равен требуемому значению р. Ведущая звездочка 4 ока- зывается повернутой в плоскости, перпендикулярной общему валу 7, в сторону, обратную направлению вращения общего вала 7 на угол р, равный центральному углу между проекцией точки контакта 11 звена 12 тяговой цепи 13 с зубом тяговой звездочки 6 и между проекцией на ту же плоскость точки контакта 9 звена 10 приводной цепи 8 с зубом приводной звездочки 5.
Получаемое в результате описанной установки взаимное расположение ведущей и приводной звездочек приводит в соответствие положение звена 10 приводной цепи 8, соответствующее началу выхода из зацепления данного звена с зубом приводной звездочки 5, и положение звена 12 тяговой цепи 13, соответствующее началу входа в
зацепление данного звена с зубрм тяговой звездочки б, что означает настройку уравнительного механизма на оптимум эффективной работы.
Уравнительный механизм работает следующим образом.
При включении приводного электродвигателя 1 выходной вал 3 редуктора 2 вместе
с ведущей звездочкой 4 совершает равномерное вращение. От ведущих звездочек 4 практически равномерное движение передается приводной цепи 8, которая, находясь в зацеплении с приводной звездочкой 5,
сообщает последней переменную периодическую скорость вращения. Но поскольку на общем валу 7 совместно с приводной звездочкой 5 находится и тяговая звездочка 6, то и последняя будет вращаться с переменной
периодической скоростью.
Поскольку ведущая звездочка 4 повернута в плоскости, перпендикулярной общему валу, относительно приводной звездочки 5 в сторону обратную направлению вращения общего вала на угол р, обеспечивающий совпадение момента времени начала выхода из зацепления звена 10 приводной цепи 8 с зубом приводной звездочки 5 и момента времени начала входа в зацепление звена
12 тяговой цепи 13 с зубом тяговой звездочки 6, колебания тяговой звездочки 6 совершаются точно в противофазе с колебаниями тяговой цепи 13 и скорость движения последней становится практически равномерной.
Предлагаемая конструкция уравнительного механизма для цепных тяговых органов транспортирующих машин по сравнению с прототипом имеет следующие преимущества: упрощается процедура настройки уравнительного механизма на оптимум эффективной работы; повышается точность настройки уравнительного механизма на оптимум.
Формула изобретения
Уравнительный механизм для цепных тяговых органов транспортирующих машин.
включающий приводную и тяговую звездочки, установленные на общем валу так, что их проекции на плоскость, перпендикулярную общему валу, полностью совпадают, многорядную ведущую звездочку с мелким шагом
зубьев, установленную на валу редуктора, и многорядную цепь с разным шагом в рядах, охватывающую ведущую и приводную звездочки, отличающийся тем, что, с целью упрощения настройки механизма, редуктор с ведущей звездочкой установлен с возможностью перемещения ведущей звездочки по рической оси общего вала и в направлении, дуге окружности с центром на геомет- обратном вращению общего вала.
Использование: промышленный транспорт. Уравнительный механизм для цепных тяговых органов транспортирующих машин включает приводную и тяговую звездочки, установленные на общем валу так, что их проекции на плоскость, перпендикулярную общему валу, полностью совмещены, многорядную ведущую звездочку с мелким шагом зубьев, установленную на валу редуктора, и многорядную цепь с разным шагом в рядах, охватывающую ведущую и приводную звездочки. Редуктор с ведущей звездочкой установлен с возможностью перемещения ведущей звездочки по дуге окружности с центром на геометрической оси общего вала и в направлении, обратном вращению общего вала. Регулирование взаимного расположения ведущей и приводной звездочек обеспечивает настройку уравнительного механизма на оптимальную работу 3 ил
2 3 4
/4
4
Ii.-M.
-Ч |--у-Т-
fci 4№
v yf т -vf.u ..««-,-Ј. -J ; „
л.„ ™ - -:--, -™-™- .
-/ - Чч ( ь- -- - ..-5 -- J
HJ1 jC±f
, -.- «. - -- . . r . „r «.,
дашщюпп
-i Ј -,. - JS-i-w -AA. - . ь -зЛг-А л/., JGw- ual-tfC.
5
г2
5
CQZS
Фиг, 3
| Уравнительный привод для цепных тяговых органов транспортирующих машин | 1980 |
|
SU932742A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Уравнительный привод для цепных тяговых органов транспортирующих машин | 1984 |
|
SU1173664A2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
