О
ел
00
ел
Изобретение относится к промышленному транспорту, в частности к способу регулирования уравнительного механизма конвейера с цепным тяговым органом.
Целью данного изобретения является упрощение процесса регулирования и повышение точности регулирования путем обеспечения определения одновременности входа в контакт зуба тяговой звездочки с роликом тяговой цепи и выхода из контакта зуба приводной звездочки с роликом цепей.
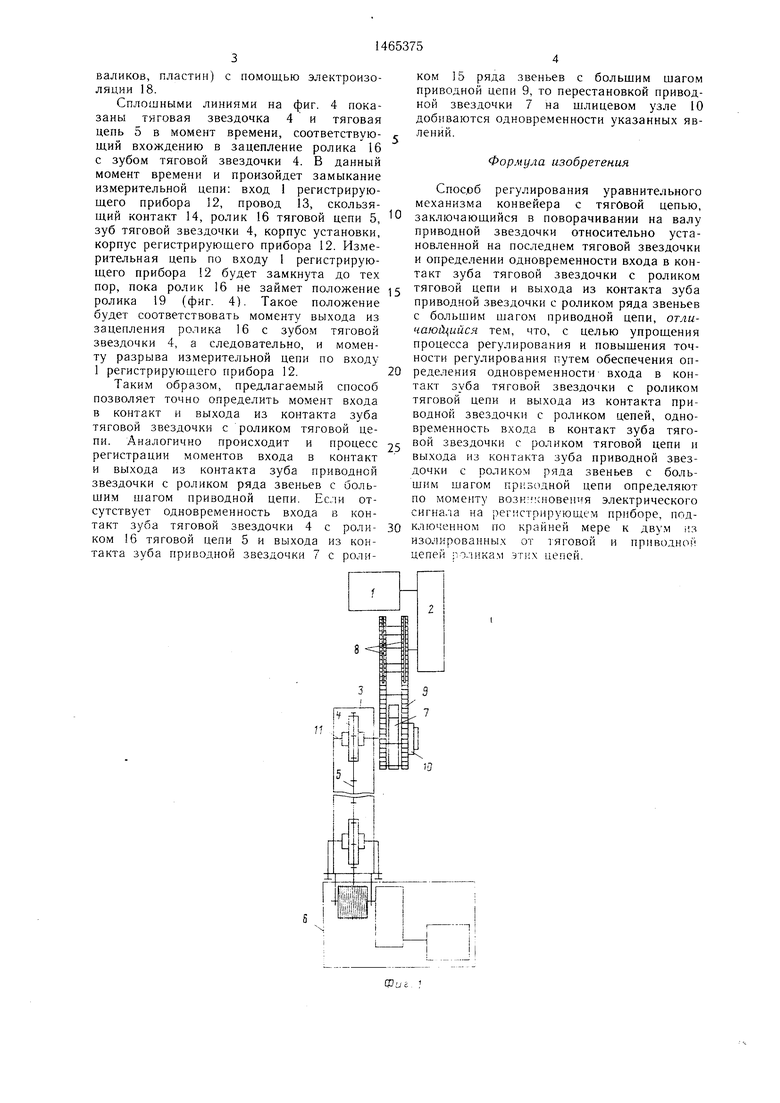
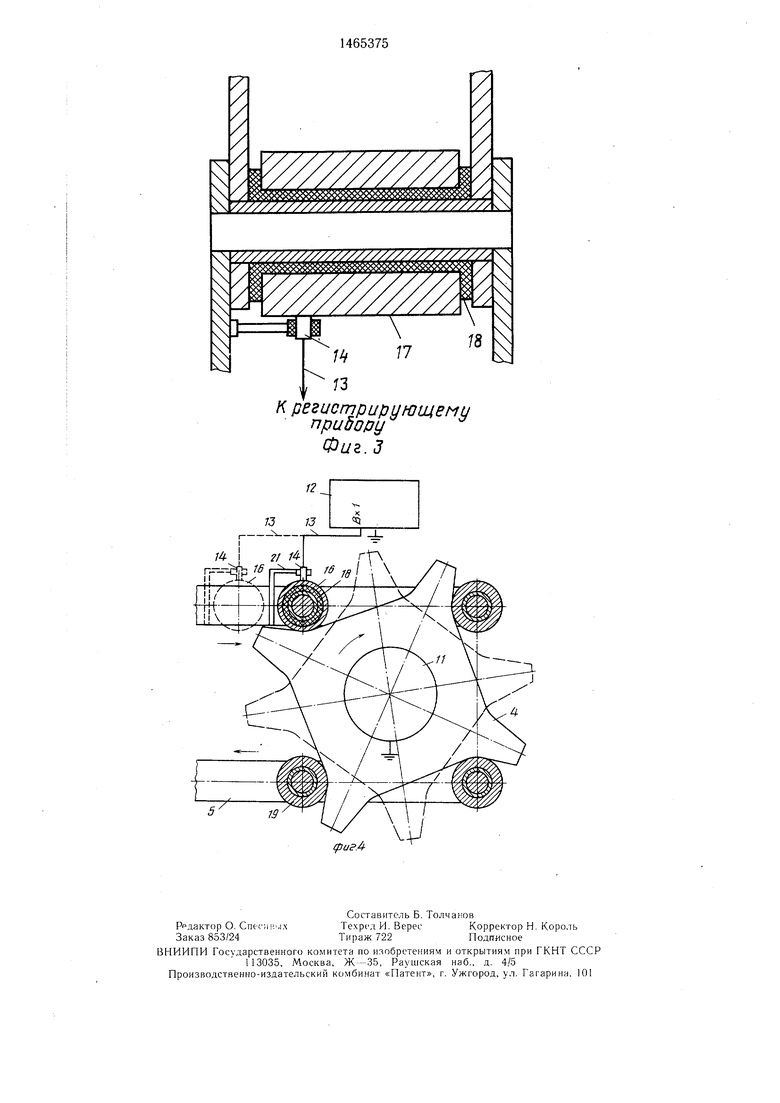
На фиг. 1 дана схема установки для реализации предлагаемого способа регулирования уравнительного механизма; на фиг. 2 - принципиальная схема включе- ния роликов в цепь регистрирующего прибора для случая, когда электрически изо- лированные ролики тяговой и приводной цепей находятся в зацеплении с зубьями звездочек; на фиг. 3 - устройство звена цепи с роликом, электрически изоли- рованным от звена цепи и снабженным скользящим контактом; на фиг. 4 - тяговая звездочка и звенья тяговой цепи, включая звено с электрически изолированным роликом со скользящим контактом.
Супдность изобретения заключается в том, что в способе регулирования уравнительного механизма конвейера с тяговой цепью, заключающемся в поворачивании на валу приводной звездочки относительно установленной на последнем тяговой звездочки и опрелтелении одновременности входа в контакт зуба тяговой звездо1-:ки с роликом тяговой цепи и выхода из контакта зуба приводной звездочки с роликом ряда звеньев с больщим шагом приводной цепи, одновременность входа в контакт зуба тяговой звездочки с роликом тяговой цепи и выхода из контакта зуба приводной звездочки с роликом ряда звеньев с больптим шагом приводной цепи определяют по моменту возникновения эл мчтри- ческого сип-ала на регистрирующем при- боре, подключенном по крайней мере к двум из изолированных от тяговой и г:ри- водной цепей роликам этих цепей.
Способ осуществляется следуюпхим обра-
30 М.
В момент входа в зацепление зуба тяговой звездочки с электрически изолиро- р.ан(ым роликом тяговой пепи и в момент выхода из зацепления зуба приводной звездочки с электрически изолированным роли- ком ряда звеньев с большим шагом приводной цепи появляются сигналы на регистрирующем приборе, в измерительные цепи которого вк чючены электрически изолированные ролики. Совпадение во времени мо- мсиго :. появления указанных сигналов на рс-; пстрирующем приборе свидетельствует об оптимальном относительном положении гфи- водной и тяговой звездочек на валу д.пя
5
О
0
0
c
0
0
5
обеспечения эффективной работы уравнительного механизма.
Установка для реализации предлагаемого .способа регулирования уравнительного механизма включает приводной двигатель 1 с редуктором 2, рещтачный став 3 с тяговой звездочкой 4, огибаемой тяговой цепью 5, нагрузочный узел 6, уравнительный механизм с приводной и ведущей звездочками 7 и 8 и охватывающей их приводной цепью 9, выполненной трехрядной, щлицевой узел 10, смонтированный на приводном валу 11 и регистрирующий прибор 12, соединенный проводами 13 со скользящими контактами ,14, контактирующими с роликом 15 приводной цепи 9, расположенным в ряде ее звеньев с большим шагом, и с роликом 16 тяговой цепи 5. Поверхность 17 роликов 15 и 16 отделения от массы конвейера и уравнительного механизма электроизоляцией 18. Остальные ролики 19 и 20 тяговой 5 и приводной 9 цепей могут быть неизолированными. Скользящие контакты 14 установлены на траверсах 21, прикрепленных к пластинам тяговой 5 и приводной 9 цепей.
При включении электродвигателя 1 через редуктор 2 ведущей звездочке 8 сообщается равномерная угловая скорость. Вращение от ведущей звездочки 8 передается звеньям с меньшим шагом приводной цепи 9, и она совершает практически равномерное движение. Приводная цепь 9 рядом звеньев с большим шагом находится в зацеплении с- приводной звездочкой 7 и передает через нес приводному валу 11 пульсирующую скорость вращ,ения, которая изменяется периодически каждый раз при входе в зацепление с зубьями приводной звездочки 7 шарниров ряда звеньев с большим тагом приводной цепи 9.
Тяговая звездочка 4 служит для перс- дачи движения тяговой иечи 5. Степень выравнивания скорости движения тяговой цепи 5 зависит от точности совпадения момента входа в зацепление ро.ликов 16 тяговой цепи 5 с зубом тяговой звездочки 4 и .момента выхода из зацсп,1С1:;-1я роликов 15 приводной цепи 9 с зубом приводпой звездочки 7.
Процесс формирования сигнала кн регистрирующем приборе 12 рассмотрим на примере входа 1 (фиг. 2).
На фиг. 4 штриховыми ;:иния.ми показаны ролик 16, скользящий контакт 14 и траверса 21 в момент времени, когда ролик 16 еще не вошел в контакт с зубом тяговой звездочки 5. При это.м измерительная цепь по входу 1 регистрирх-ю- nj.ero прибора 12 будет разомкнута, поскольку ролик 16 электрически изолирован от остальных элементов тяговой це.пи 5 (втулок.
валиков, пластин) с помощью электроизоляции 18.
Сплошными линиями на фиг. 4 показаны тяговая звездочка 4 и тяговая цепь 5 в момент времени, соответствую- г щий вхождению в зацепление ролика 16 с зубом тяговой звездочки 4. В данный момент времени и произойдет замыкание измерительной цепи: вход регистрирующего прибора 12, провод 13, скользяком 1ь ряда звеньев с больщим шагом приводной цепи 9, то перестановкой приводной звездочки 7 на щлицевом узле 10 добиваются одновременности указанных явлений.
Формула изобретения
Спос.об регулирования уравнительного
i.vx iip,, i, iii /v/DUA I j, ct u iDj i-механизма конвейера с тягОвой цепью,
щий контакт 14, ролик 16 тяговой цепи 5, заключающийся в поворачивании на валу зуб тяговой звездочки 4, корпус установки,приводной звездочки относительно устакорпус регистрирующего прибора 12. Изме-новленной на последнем тяговой звездочки
рительная цепь по входу 1 регистрирую-и определении одновременности входа в конщего прибора 12 будет замкнута до тех такт зуба тяговой звездочки с роликом пор, пока ролик 16 не займет положение 15 тяговой цепи и выхода из контакта зуба ролика 19 (фиг. 4). Такое положение приводной звездочки с роликом ряда звеньев
с большим шагом приводной цепи, отли- чаю1Цийся тем, что, с целью упрощения процесса регулирования и повышения точности регулирования путем обеспечения оп- 20 ределения одновременности входа в контакт зуба тяговой звездочки с роликом
будет соответствовать моменту выхода из зацепления ролика 16 с зубом тяговой звездочки 4, а следовательно, и моменту разрыва измерительной цепи по входу 1 регистрирующего прибора 12.
Таким образом, предлагаемый способ позволяет точно определить момент входа в контакт и выхода из контакта зуба тяговой звездочки с роликом тяговой цетяговой цепи и выхода из контакта приводной звездочки с роликом цепей, одновременность входа в контакт зуба тягопи. Аналогично происходит и процесс 25 звездочки с роликом тяговой цепи и
П РЫРТП ИЫЫ Л r AdiS T f OnVj-iTTOnirj 4i.Y,-,wj.-T DI fV / no FJ-I т. -чч-т-.1|..t f f-, .-,,n.,,-,,-v.,.,.,
регистрации моментов входа в контакт и выхода из контакта зуба приводной звездочки с роликом ряда звеньев с большим шагом приводной цепи. Если отсутствует одновременность входа в контакт зуба тяговой звездочки 4 с роликом 6 тяговой цепи 5 и выхода из контакта зуба приводной звездочки 7 с роливыхода из контакта зуба приводной звездочки с роликом ряда звеньев с большим шагом пр1;5одной цепи определяют по моменту возн:;:;новення электрического сигнала на регистрирующем приборе, под- 30 ключенном по крайней мере к двум л изолированных от тяговой и приводной цепей ро.лнкам этих цепей.
ком 1ь ряда звеньев с больщим шагом приводной цепи 9, то перестановкой приводной звездочки 7 на щлицевом узле 10 добиваются одновременности указанных явлений.
Формула изобретения
с большим шагом приводной цепи, отли- чаю1Цийся тем, что, с целью упрощения процесса регулирования и повышения точности регулирования путем обеспечения оп- ределения одновременности входа в контакт зуба тяговой звездочки с роликом
тяговой цепи и выхода из контакта приводной звездочки с роликом цепей, одновременность входа в контакт зуба тяго звездочки с роликом тяговой цепи и
звездочки с роликом тяговой цепи и
DI fV / no FJ-I т. -чч-т-.1|..t f f-, .-,,n.,,-,,-v.,.,.,
выхода из контакта зуба приводной звездочки с роликом ряда звеньев с большим шагом пр1;5одной цепи определяют по моменту возн:;:;новення электрического сигнала на регистрирующем приборе, под- ключенном по крайней мере к двум л изолированных от тяговой и приводной цепей ро.лнкам этих цепей.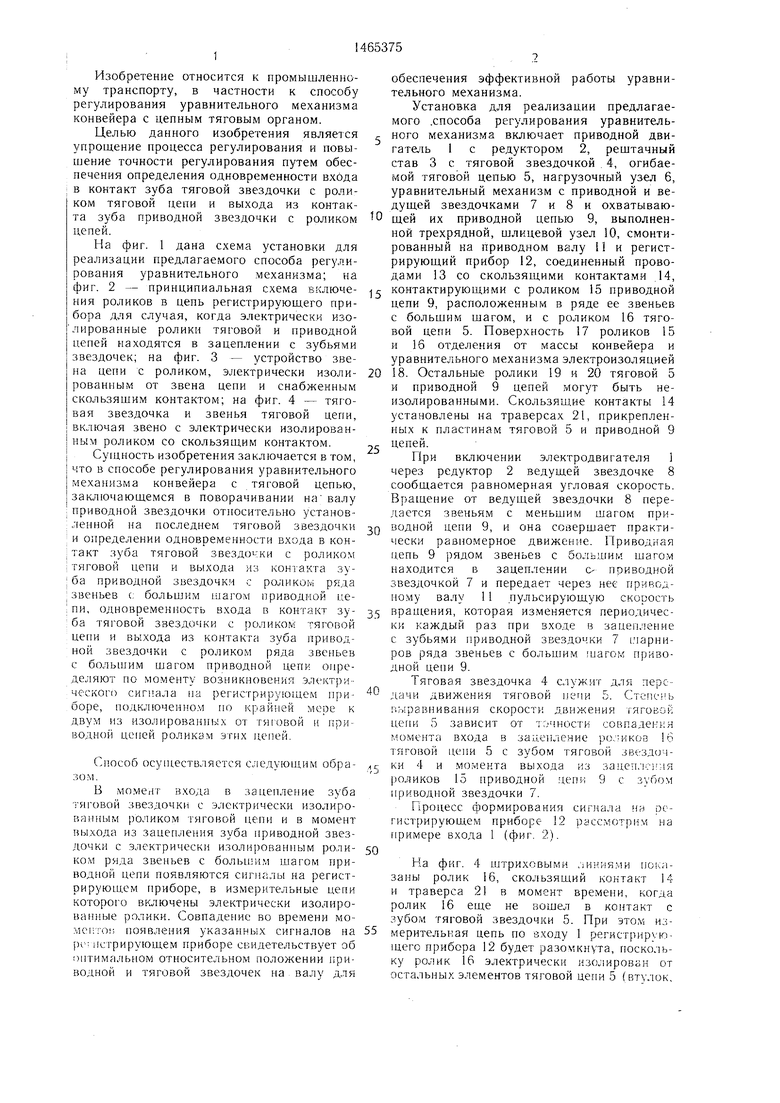
| название | год | авторы | номер документа |
|---|---|---|---|
| Уравнительный механизм для цепных тяговых органов транспортирующих машин | 1990 |
|
SU1765075A1 |
| Уравнительный привод для цепных тяговых органов транспортирующих машин | 1984 |
|
SU1173664A2 |
| Стенд для исследования конвейеров с цепным тяговым органом | 1984 |
|
SU1217738A1 |
| Уравнительный привод для цепных тяговых органов транспортирующих машин | 1980 |
|
SU932742A1 |
| Цепная передача | 1990 |
|
SU1776901A1 |
| Уравнительный привод для цепных тяговых органов транспортирующих машин | 1983 |
|
SU1121896A2 |
| Транспортер | 1978 |
|
SU749744A1 |
| Механизм подачи очистного комбайна | 1984 |
|
SU1155748A1 |
| Уравнительный привод для цепных тяговых органов транспортирующих машин | 1982 |
|
SU1104781A2 |
| ЦЕПЬ ПРИВОДНАЯ ПЛАСТИНЧАТАЯ, ИМЕЮЩАЯ ОТКРЫТЫЕ ШАРНИРЫ КАЧЕНИЯ С ЦИЛИНДРИЧЕСКОЙ ФОРМОЙ ЭЛЕМЕНТА ЗАЦЕПЛЕНИЯ | 2009 |
|
RU2472049C2 |
Изобретение относится к промышленному транспорту. Цель изобретения - упрощение процесса регулирования и повышение точности регулирования путем обеспечения определения одновременности входа в контакт зуба тяговой звездочки с роликом тяговой цепи (Ц) и выхода из контакта зуба приводной звездочки с роликом Ц. При включении электродвигателя вращение от ведущей звездочки передается звеньям с меньп1им щагом приводной Ц 9, находящейся в зацеплении с приводной звездочкой 7. Через последнюю приводному валу 11 передается пульсирующая скорость вращения, которая изменяется периодически при входе в зацепление с зубьями звездочки 7 щарниров ряда звеньев с большим щагом Ц 9. Степень выравнивания скорости движения тяговой Ц 5, приводимой в движение тяговой звездочкой 4, зависит от точности совпадения моментов времени входа в зацепление роликов 16 Ц 5 с зубом звездочки 4 и моментов времени выхода из зацепления роликов 15 Ц 9 с зубом звездочки 7. Одновременность определяют по моменту возникновения электрического сигнала на регистрирующем приборе 12. Последний соединен проводами 13 со скользящими контактами 14, контактирующими с роликом 15 Ц 9 и с роликом 16 Ц 5. 4 ил. «э (Л
К рБгцст :)и)иющеми придору
Фиг.З
12
13
74 I / /4
№
фигА
| Авторское свидетельство СССР № 1419043, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Стенд для исследования конвейеров с цепным тяговым органом | 1984 |
|
SU1217738A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
