0,5 К F,,- 2М, (F, - F где М - величина главного момента первого порядка инерционных нагрузок всех меУ:анизмов автомата относительно оси основного кривошипного вала при угле 4 О ;
-то же, при угле 90° ;
;
-расстояние между осями ос 11 новного кривошипного вала и дополнительного кривошипного вала,
величина дисбаланса D корректирующего противовеса определена зависимостью
V
м;. /(1.,).
(3)
2 о
угол установки центра массы основнцк противовесов относительно продольной оси при угле Ч О определен зависимостью
У arctg((F - F. )/(F + F )),(4)
1TO л- .
угол установки центра массы дополнительных противовесов относительно той же оси при угле ч, О определен зависимостью
,ГЧ5:(„
( I.o
1
а угол установки центра массы кор.ректирующего противовеса относительно той же оси при угле определен зависимостью
arctgCM /М, )..
(6)
п t-l
2,Пресс-автомат по п.1, отличающийся тем, что мотьшевые шейки кривошипов основного и дополнительного кривошипных валов размеш;ены по разные стороны от упомянутой плоскости, одно из ведущих конических колес и ведомая коническая шестерня расположены по одну сторону соответствукицего продольного вала, при этом.корректирующий противовес расположен в одной плоскости с центром масс дисбалансов основных и дополнительных противовесов.
3,Пресс-автомат по п.1, отличающийся тем, что он снабжен закрепленньм на каждом из продольных -валов добавочным противовесом, при этом мотьшевые шейки кривошипов приводов ножей и мотылевая шейка основного кривошипного вала расположены по одну сторону от упомянутой плоскости, а центры масс основных и добавочных противовесов расположены по разные стороны от нее. ,JI (2)
| название | год | авторы | номер документа |
|---|---|---|---|
| Высечные ножницы | 1987 |
|
SU1530343A1 |
| Вертикальный кривошипный пресс-автомат | 1984 |
|
SU1180275A1 |
| Пресс-автомат для обработки длинномерного материала | 1987 |
|
SU1442298A1 |
| Устройство уравновешивания поршневого рядного двухцилиндрового четырёхтактного двигателя внутреннего сгорания | 2023 |
|
RU2796180C1 |
| Способ уравновешивания динамического момента на входном валу привода возвратно-движущихся масс и устройство для его осуществления | 1990 |
|
SU1724970A1 |
| ПРИВОД КЛЕТИ СТАНА ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 2011 |
|
RU2481163C1 |
| Устройство для подачи деталей | 1981 |
|
SU1018763A1 |
| Устройство для уравновешивания двигателя внутреннего сгорания | 1987 |
|
SU1467288A1 |
| УСТРОЙСТВО для УРАВНОВЕШИВАНИЯ ЦЕНТРАЛЬНОГО КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА | 1970 |
|
SU274535A1 |
| Устройство уравновешивания кривошипно-шатунного механизма | 1977 |
|
SU734462A1 |
1. ПРЕСС-АВТОМАТ, содержащий размещенный в опорах станины .и связанный шатуном с ползуном кривошипный вал с закрепленными на нем двумя основными противовесами и двумя ведущими коническими колесами, смонтированные в подшипниках станины два продольных вала с ведомым коническим колесом на каждом из них, находящимся в зацеплении с соответствующим ведущим коническим колесрм, механизм подачи, а также механизм реза с кривошипными приводами ножей, отличающий ся тем, 4To,j с целью повьшения производительности путем увеличения степени уравновешенности, он снабжен смонтированными на кривошипном валу двумя дополнительными коническими колесами с дополнительным противовесом на каждомиз них.свя-занными зацеплением каждое с соответ- ствуюищм ведомым коническим колесом, дополнительными опорами,смонтированными в стани:1е в одной штоскости с ос- л. новными опорами и подщипниками, механизм подачи выполнен в виде смонтированного в дополнительных опорах дополнительного кривошипного вала с корректирукяцим противовесом, смонтированного параллельно основному кривощипному -валу, зубчатой конической передачи, ведущая щестерня которой закреплена на соответствунлцем продольном валу, а ведомая - на дополнительном кривошипном.валу, дополнительные конические колеса выполнены с числом зубьев, равным числу зубьев ведущих конических колес, щестерни упомянутой конической передачи выполнены с передаточным отношением, равнь1м передаточному отношению ведущего и ведЬмого конических колес, при этом величина дисбаланса D, основных с € противовесов определена по зависимости Л D, 0,5 /(, )П (F,- F,, )Х У1 (1) где F, величина проекции главп Ко ного вектора сил инерции первого порядка всех меО5 ханизмов автомата на проСО дольную ось при угле межсл ду кривошипом основного 4 кривошипного вала и этой осью 4 0° (переднее 05 крайнее положение ползуна); то же, при угле Ч 90°; V1 1-, то же, на вертикальную ось, при угле 4, О ; то же, при угле Ч 90 ; величина угловой скорости и) вращения основного кривошипного вала, величина дисбаланса D дополнитель- г ных противовесов определена зависимостью
1
Изобретение относится к кузнечнопрессовому машиностроению, а именно к конструкции прессов-автоматов.
Цель изобретения - повышение производительности за счет увеличения степени уравновешенности автомата.
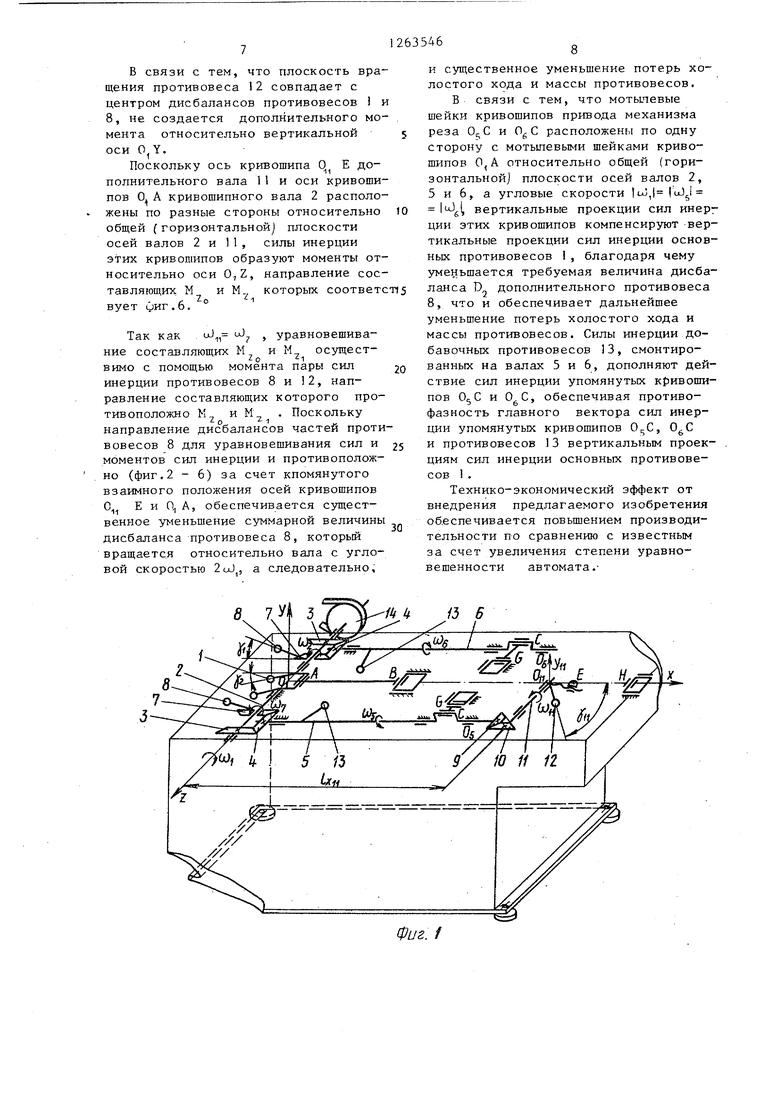
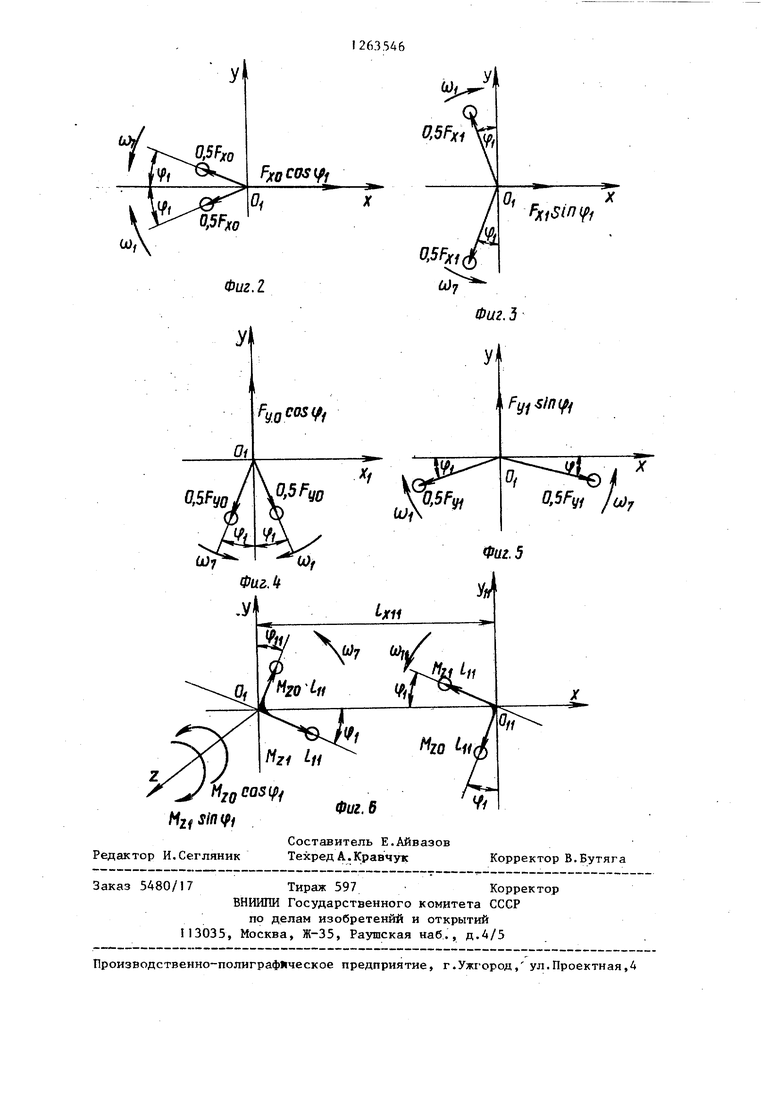
На фиг.1 изображена структурная кинематическая схема пресс-автомата при переднем крайнем положении ползуна основного кривошипного механизма 0,АВ, когда угол между.кривошипом и продольной осью 0 X 4 0; на фиг.2 - 5 - схемы действия составляющих главного вектора сил инерции первого порядка всего автомата и сил инерции частей основных и дополнительных противовесов, необходимых для их уравновешивания; н1 фиг.6 - схема действия составляющих главного момента сил инерции первого порядка всего автомата относительно оси 0 Z основного кривошипного вала и сил инерции частей дополнительных и корректирующего противовесов, необходимьк для уравновешивания.
Пресс-автомат состоит из двух основных противовесов I, закрепленных на основном .кривошипном валу 2, дисбаланс D., которых определен по зависимости (1), а-угол установки центра массы - по зависимости (4), и двух закрепленных на валу 2 веду- щих конических колес 3, с числом зубьев Z, , каждое из которых взаим действует соответственно с одним из двух ведомых конических колес 4 с числом зубьев Z, закрепленных на концах соот1ветствую1цих продольных валов 5 и 6. Каждое из ведомых кони ческих колес 4 взаимодействует соответственно с одним из двух дополнительных конических колес 7 с чис лом зубьев Z, установленных на основном кривошипном валу 2 с возможностью вращения, тгри этом Zj Ъ-,. На дополнительных конических колесах 7 смонтированы дополнительные противовесы 8, дисбаланс .D .которы определен по зависмоЬти (2), уголу установки центра массы - по зависимости (5) . На втором конце продольного вала 5 закреплена ведущая коническая шестерня 9 с числом зубьев Zg, взаимодействукщая с ведомой конической шестерней 10 с числом зубьев Z., , закрепленной на дополнительном криво шипном валу 11 механизма подачи 0„ ЕЙ, при этом Z, : Z, Z.. : Z, J t: J - 1О 9 Ведомая коническая щестерня ГО и кинематически сочлененное с ней ведущее коническое кблесо 3 расположены по одну сторону сочленякщего их про дольного вала 5, На дополнительном кривошипном валу 11 смонтирован корректирующий противовес 12, дисбаланс РЗ .которого определен по зависимости (3), а угол jji установки центра массы - по зависимости (6). Плоскость вращения центра массы корректирующего противовеса 12 совпадает с цент ром дисбалансов основных 1 и дополни тельных 8 противовесов. Продольные валы 5 и 6 выполнены с кривошипами. OgC и OgC привода механизма реза OgCgG и OgCG. Мотылевые шейки кривошипов 05 С и Og С расположены по одну сторону с мотылевой шейкой кривошипа 0. А основного кривошипного вала 2 относительно плоскости осей валов 2, 5 и 6, при этом на продольных валах 5 и 6 смонтированы добавочные противовесы 13, центры масс которых .расположены по разные стороны с центрами масс основных противовесов относительно плоскости осей валов 2, 5 и 6. На продольных валах 5 и 6 монтируются приводные элементы других вспомогательных механизмов (не показаны), а на валу 2 - элемент его . приводного устройства 14. Автомат работает следующим образом. Вращение и крутящий момент передаются с элемента приводного устройства 14 на основной кривошипный вал 2 с кривошипом О,А, а с него через ведущие конические колеса 3 и ведомые конические колеса 4 - на продольные валы 5 и 6 с кривошипами ОдС и Og С и. добавочными противовесами 13. Далее вращение и крутящий мсмеят передаются через дополнительные конические колеса 7, взаимодействующие с ведомыми коническими колесами 4, на дополнительные противовесы 8, и через ведущую коническую шестерню 9 - на ведомую коническую шестерню 10, которая вращает дополнительный кривошипный вал 11 с корректирующим противовесом 12 и кривошипом 0, Е. Благодаря тому, что числа зубьев Z, Z , Z, Z и Z соответствующих кЪнических колес и шестерен выбраны из условий Z Z Zj : Zq, обеспечивается угловая скорость этих элементов, равная на величину узловой скорости J, основного кривошипного вала 2., т.е. M7l lujJ; lu) | |uJj, при этом направление и), и и. -7 противоположно, кольку ведомая коническая шестерня 10 и кинематически сочлененное с ней ведущее коническое колесо 3 расположены по одну сторону продольного вала 5, обеспечивается противоположное направление следовательно; величина и направление lO, и J„ одинаковы, т.е. tJ, „ . Ввиду равенства чисел зубьев ведущего и ведомо-о конических колес Z Z , обеспеивается равенство по величине угло-ых скоростей вращения валов 1,5 6, т.е. 141 Uj |u3,|. Кривошипы о, А, , , 0, Е, а акже приводные элементы других спомогательных механизмов передают ращение и усилие на шатуны и другие венья этих механизмов и далее на их сполнительные звенья. В результате возникают силы и моенты сил ;Инерции (инерционные нагузки), основную часть которых для сех рычажных механизмов составлят инерционные нагрузки первого поядка. Для каждого плоского мехаизма-автомата эти нагрузки опредеяются по следующим зависимостям F. F., . cos 4 F - sinM X; XQI 1 ii , F.. F., . COS4. + F (7) M M cos 4 + M- sin I; T-o t i i где F . , Fy. - проекции главного ве тора сил инерции пер вого порядка у-по механизма на оси 0 X и 0,Y; М . главньй момент относительно оси 1 -го кривошипного вала инерционных нагрузо первого порядка t механизма;FX . г FV М - значения соответствующих величин при угле , вычисля емые методами; F.. F.,. , - то же, при Ч 90° ,, В результате вращения противовесов 1, 8 и 12 возникают центробежные силы инерции F. , F , F., величин которых определяется по зависимос тям. ... 5 F где D , Ц. , D, - величина дисбалан . , с(5в противовесов соответственно 1, и 12. Действие на автомат сил инерции первого порядка всех его механизмо эквивалентно действию их геометрической суммы, которая назьгоается главным вектором сил инерции перво го порядка, величина составляющих которого определяется по зависимое тям F F cos f F. -sinM.l X Xo 1 -« 1
F Fy cosvf + F . sin ч (9)
Оt t
где F IF . ; FX rF. .; F., . , I 1 x,,V УО
yt Для уравновещнвания сил инерции
первого порядка всего автомата достаточно уравновесить каждую составлякяцую их главного , например, с помощью частей противовесов 1 и 8, вращающихся вокруг вала 2.
Дисбалансы противовесов 1, В и 12, Ьбеспечиванлцие урвновешивание инерционных нагрузок первого порядка всего .автомата и положение их центров масс, определяются путем геометрического суммирования дисбалансов их частей по фиг.2 - 6, например при угле V, О, результат которого полностью соответствует зависимостям (О - (6).. Ha фиг.2-5 показано уравновешиание, соответственно составляющих F , Fj , F и F с помощью частей противовесов 1, величина дисбаланса которых выбрана по зависимости (1) и частей противовесов 8 с величиной дисбаланса по зависимости (2), в которой следует принять К, М., 0. 0 1 Действие на автомат моментов сил инерции первого порядка всех его механизмов относительно любой оси, например оси 0., кривошипного вала 2, эквивалентно действию их геометрической суммы, которая назьшается главным моментом сил инерции первого порядка относительно оси 0,Z, величина которого определяется зависимостьюМ М cos 4 + М -, sin Ч , iio 11 I М - Г F . Iv- +rF 1, где М. Xp 6Zo,oi -TF-I+fF 7 --7 7-V -Vy-l -12ifVK I I ly. координаты осей кри i / I . ВОШИПНЫХ валов i -тых механизмов относительно оси 0 Z основного кривошипного вала 2. Для уравновешивания главного момента сил инерции первого порядка всего автомата относительно поперечной оси, проходящей через его центр масс, достаточно уравновесить его главный вектор сил инерции первого порядка и составляющие главного момента первого порядка относительно любой оси, в частности оси О, Z . На фиг.6 показано уравновешивание соответственно составляющих М и М . с помощью частей противовеса 12, величина дисбаланса которого выбрана по зависимости (3), и частрй противовеса.8 с величиной дисбаланса по зависимости (2), в которой следует принять F Р„ В связи с тем, что плоскость вра щения противовеса 12 совпадает с центром дисбалансов противовесов 8, не создается дополнительного мо мента относительно вертикальной оси О, Y. Поскольку ось кривошипа 0| Е дополнительного вала 11 и оси кривоши пов 0. А кривошипного вала 2 располо жены по разные стороны относительно общей (горизонтальной плоскости осей валов 2 и 11, силы инерции этих кривошипов образуют моменты от носительно оси О,Z, направление сос тавлягош;их М и М которых соответ 01 вует уиг.6. uJ,, uJ уравновешиваТак как 7 И v ние составляющих М осущестZ О момента пары сил вино с помощью момента пары сил инерции противовесов 8 и 12, направление составляющих которого противоположно K.J 7. Поскольку направление дисбалансов частей проти вовесов 8 для уравновешивания сил и моментов сил инерции и противоположно (фиг.2 - 6) за счет кпомянутого взаимного положения осей кривошипов 0 Е и О, А, обеспечивается существенное уменьшение суммарной величины дисбаланса противовеса 8, который вращается относительно вала с угловой скоростью 2uJ, а следовательно.
Фиг. / и существенное уменьшение потерь холостого хода и массы противовесов. В связи с тем, что мотьшевые шейки кривошипов привода механизма реза OjC и расположены по одну сторону с мотылевыми шейками кривошипов относительно общей (горизонтальной плоскости осей валов 2, 5 и 6, а угловые скорости ou, ItJgl, вертикальные проекции сил инерции этих кривошипов компенсируют вертикальные проекции сил инерции основных противовесов 1, благодаря чему уменьшается требуемая величина дисбаланса D дополнительного противовеса 8, что и обеспечивает дальнейшее уменьшение потерь холостого хода и массы противовесов. Силы инерции добавочных противовесов 13, смонтированных на валах 5 и 6, дополняют действие сил инерции упомянутых кривошипов и , обеспечивая противофазность главного вектора сил инерции упомянутых кривошипов , и противовесов 13 вертикальным проекциям сил инерции основных противовесов 1 . Технико-экономический эффект от внедрения предлагаемого изобретения обеспечивается повьш1ением производительности по сравнению с известным за счет увеличения степени уравновешенности автомата.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Руководство по эксплуатации | |||
| М.: Станкоимпорт, 1982, с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
