дополинтелыши валу 14. НА кривошипном 7 и дополнительном 14 валах яа- креплеио не менее чем по два противовеса 15, 16 и 17, 18 на каждом валу по разные стороны относительно вертикальной плоскости симметрии высеч- ных нох(ниц. Не менее чем один из этих противовесов установлен с возможностью поворота относительно своего вала и фиксации в заданном положении. При работе высечпых ножниц аоа- никают инерционные нагрузки, основная часть которых уравновегиивается за счет выбора величины дисбалансов противовесов и положения радиусов их центров. 2 з.п. Л-лы, 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Высечные ножницы | 1987 |
|
SU1516256A1 |
| Вертикальный кривошипный пресс-автомат | 1988 |
|
SU1523398A1 |
| Пресс-автомат | 1985 |
|
SU1263546A1 |
| Радиально-обжимная машина | 1982 |
|
SU1118469A1 |
| РУЧНОЙ ИНСТРУМЕНТ ДЛЯ РАСПИЛОВКИ ПРЕИМУЩЕСТВЕННО МЯСНЫХ ТУШ | 1996 |
|
RU2107438C1 |
| МАШИНА ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 2001 |
|
RU2224695C2 |
| Вертикальный кривошипный пресс-автомат | 1986 |
|
SU1333599A1 |
| Привод стана холодной прокатки труб | 1987 |
|
SU1533789A1 |
| Устройство уравновешивания поршневого рядного двухцилиндрового четырехтактного двигателя внутреннего сгорания | 2022 |
|
RU2785026C1 |
| Вертикальный кривошипный пресс-автомат | 1984 |
|
SU1180275A1 |
Изобретение относится к обработке металлов давлением и может быть использовано в конструкции кривошипных механических ножниц для резки листового материала, например высечных. Цель изобретения - повышение производительности. Высечные ножницы содержат ползун 1, соединенный с основным коленным рычагом 2 кривошипно-коленного механизма привода ползуна 1. Опорная ось 8 дополнительного коленного рычага 4 сочленена с кривошипно-коромысловым механизмом регулировки хода ползуна 1. На кривошипном валу 7 закреплено зубчатое колесо 12, которое находится в зацеплении с зубчатым колесом 13 с тем же числом зубьев, установленным на дополнительном валу 14. На кривошипном 7 и дополнительном 14 валах закреплено не менее чем по два противовеса 15, 16 и 17, 18 на каждом валу по разные стороны относительно вертикальной плоскости симметрии высечных ножниц. Не менее чем один из этих противовесов установлен с возможностью поворота относительно своего вала и фиксации в заданном положении. При работе высечных ножниц возникают инерционные нагрузки, основная часть которых уравновешивается за счет выбора величины дисбалансов противовесов и положения радиусов их центров. 1 з.п. ф-лы, 3 ил.
Изобретение относится к машиностроению, а именно к конструкции кривошипных механических ножниц для резки листового материала, например высечных.
Цель изобретения - повышение производительности .
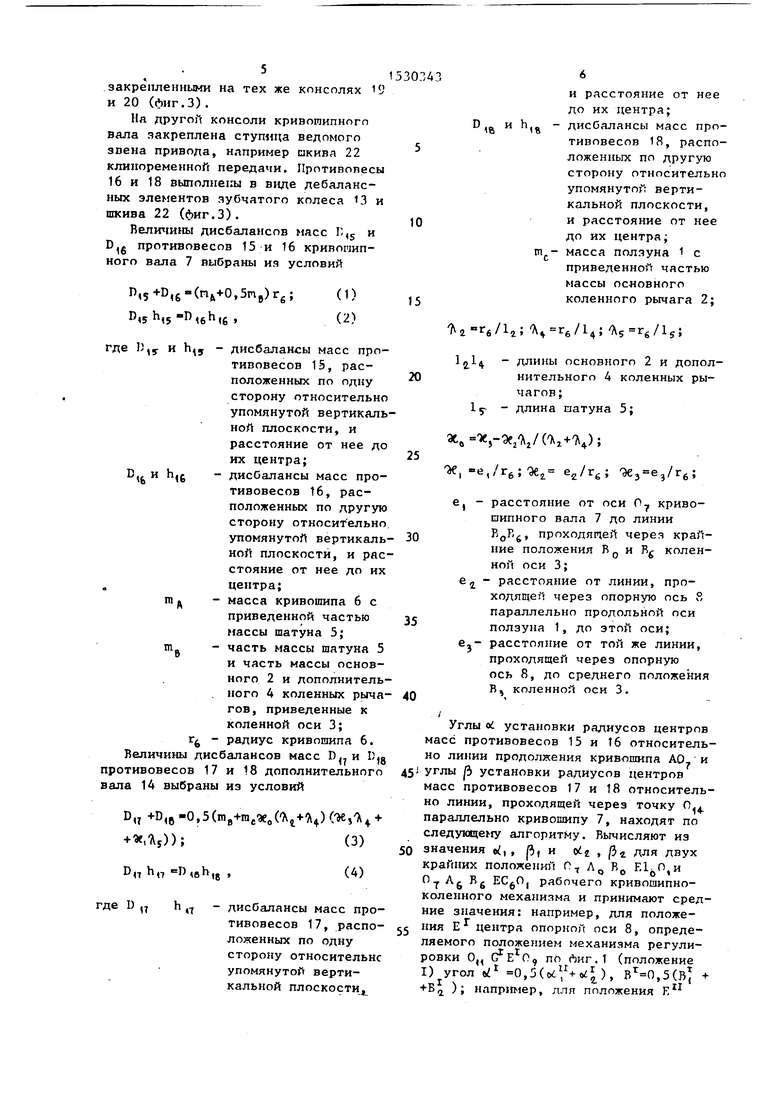
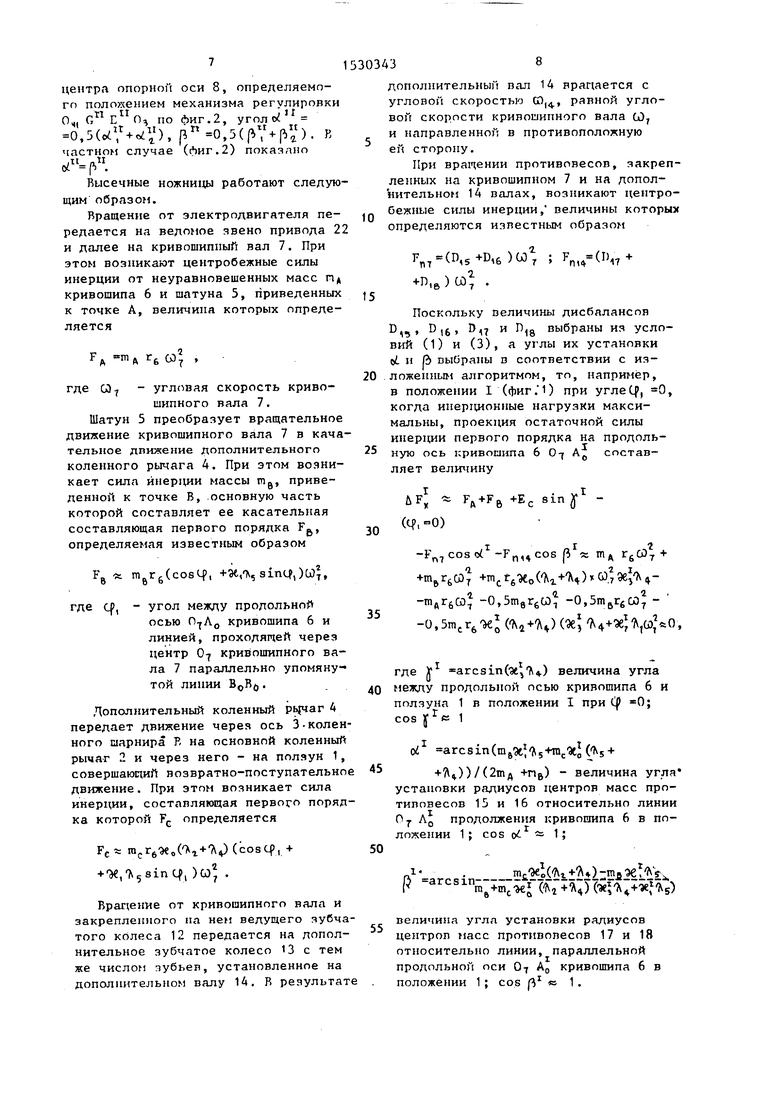
На фиг.1 изображена кинематическая схема высечных ножниц при рабочем кривопипно-коленном механизме О7 А В Е Сд О,, располокенном в крайнем положении, соответствующем нижнему положению его ползуна, и при крайнем положении I кривошипно-коромысло вого механизма регулировки хода пол- зупа 0(1 G Е 0„ (показан штриховыми линиями), соответствующем одиночным ходап ползуна, а также показано второе крайнее положение рабочего криво шипно-коленного механизма , (штриховые линии со сдвоенным пунктиром); на фиг. 2 - кинематическая схема высечных ножниц при рабочем крипошипно-коленном механизме 0 А в ,, расположенном в крайнем положении, при котором кривошип и шатун находятся по одну сторону относительно оси кривошипного вала, и при крайнем положении II кривошиппо-коромыслового механизма регулировки хода ползуна 0, G Е 0 (показано штриховыми линиями), соответствующем его сдвоенным ходам; на фиг.З - сечение по осям-О -О и 0(,4 кривошипного и дополнительного валов при кривошипе 0-, А рабочего кривошипно-коленного механизма, расположенном в секущей плоскости мезкду ося№1 0-1 -07 и .
Высечные ножнищ содержат ползун 1 , размег1енный в направляющих станины и связанный шарниром С с основным коленным рычагом 2 рабочего криво- шипно-кпленного механизма 0,ЛВЕСО,, связанным в свою очередь с осью 3
0
5
0
5
0
5
0
5
коленного шарнира R, которая связана с дополнительным коленным рычагом 4 и с шатуном 5. Шатун 5 связан шарниром Л с кривошипом 6 кривошипного вала 7, а дополнительный коленный рычаг 4 сочленен шарниром Е с опорной осью Г;, связанной с коромысдрм 9 и шатуном 10 кривошипно-коромыслового механизма 0„ GEO,, регулировки хода ползуна. Шатун 10 связан с кривошипом 11 упомянутого механизма регулировки. На кривошипном валу 7 закреплено ведущее зубчатое колесо 12, которое находится в зацеплении с допол- нительньп зубчатым колесом 13 с тем же числом зубьев, закрепленным на дополнительном валу 14. На кривошипном валу 7 закреплено не менее двух противовесов 15 и 16 с возможностью поворота хотя бы одного из них относительно кривошипного вала 7 и фиксации в заданном положении, а на дополнительном валу 14 закреп- дено не менее двух противовесов 17 и 18 с возможностью поворота хотя бы одного из них относительно дополнительного вала 14 и фиксации в заданном положении. Противовесы 15 и 17 расположены по одну сторону относительно вертикальной плоскости, про- ходярдей через продольную ось ползуна 1 перпендикулярно оси кривошип - ного вала 7, а противовесы 16 и 18 - по другую сторону упомянутой плоскости. Противовес 15 кривошипного вала 7 и противовес 17 дополнительного вала 14 выполнены в виде деба- лансных полумуфт, например-зубчатых, Установленных на консоли 19 кривошипного вала 7 и на консоли 20 дополнительного вала 14 с возможностью регулировочного поворота относительно своих консолей и фиксации в за- да1П1ом положении в соединении с основными зубчатыми полумуфтами 21,
закрепленными на тех же консолях 19 и 20 (Лиг.З).
На другой консоли кривошипного вала закреплена стушща ведомого звена привода, например шкива 22 клииорененной передачи. Противовесы 16 и 18 вьтолнепы в виде дебаланс- ных элементов зубчатого колеса 13 и шкива 22 (Аиг.З).
Велшшны дисбалансов масс Г, ,5 противовесов 15 и 16 кривошипного вала 7 выбраны ия условий
Г (() ( - D«5h,5-D,6h,6 ,(2)
где 1),5- и Ь(у дисбалансы масс противовесов 15, расположенных по одну сторону относительно упомянутой вертикальной плоскости, и расстояние от нее до их центра;
-дисбалансы масс противовесов 16, расположенных по другую сторону относит ельно. упомянутой вертикальной плоскости, и расстояние от нее до их центра;
-масса кривошипа 6 с приведенной частью массы шатуна 5;
-часть массы шатуна 5 и часть массы основного 2 и дополнитель. него 4 коленных рычаD, и h,6
га,
m
В
коленной оси 3; г - радиус кривошипа 6. Величины дисбалансов масс 1) и противовесов 17 и 18 дополнительного вала 14 выбраны из условий
D,j +D,e-0,5(mB+me«J Njn)( + H-,5));(3)
(4)
D,-, h
n П
eh,8
и
(7
,-j - дисбалансы масс противовесов 17, расположенных по одну сторону относительно упомянутой вертикальной плоскости
0
5
0
5
0
5
0
и расстояние от нее до их центра;
D ,п и h, - дисбалансы масс противовесов 18, расположенных по другую сторону относительно упомянутой вертикальной плоскости, и расстояние от нее до их центра; m - масса ползуна 1 с приведенной частью массы ос«овного коленного рычага 2;
Aa e/ii; А Гб/Ц; A5 r6/is;
- длины основного 2 и дополнительного 4 коленных рычагов;ly- - длина шатуна 5;
, - ,/(г-);
е,/Гб; 9ej, ,;
е. - расстояние от оси 0 кривошипного вала 7 до линии BgRg, проходящей через крайние положения В Q и В коленной оси 3;
е - расстояние от линии, проходящей через опорную ось f, параллельно продольной оси ползуна 1, до этой оси;
е,- расстояние от той же линии, проходящей через опорную ось 8, до среднего положения В коленной оси 3.
Углы oi установки радиусов центров масс противовесов 15 и 16 относительно линии продолжения кривошипа АО и
углы р установки радиусов центров
масс противовесов 17 и 18 относительно линии, проходящей через точку 0, параллельно кривошипу 7, находят по следующему алгоритму. Вычисляют из
значения в, , |3, и ol-i , /J для двух крайних положениГ 0 Л В ,и Bg , рабочего кривошипно- коленного механизма и принимают средние значения: например, для положения Е центра опорной оси 8, определяемого положением механизма регулировки О,, 0 по Лиг. 1 (положение 1)угол 0,5(6), ,5(ВУ +В,, ); например, для положения Е
центра опорной оси 8, определяемого положением механизма регулировки 0ц, , по фиг.2, 0,5(oi ,), ,5((V-t-f). В частном случае (Лиг.2) показано
.
Висечные нoжниlЦJ работают следующим образом.
Вращение от электродвигателя передается на ведомое звено привода 22 и далее на кривошиппыГ вал 7. При этом возникают центробежные силы инерции от неуравновешенных масс п/ кривошипа 6 и шатуна 5, приведенных к точке А, величина которых определяется
т
е, Ы
где СЭ- угловая скорость кривошипного вала 7.
Шатун 5 преобразует вращательное движение кривошипного вала 7 в кача- тельное дпижение дополнительного коленного рычага 4. При этом вояни- кает сила инерции массы т, приведенной к точке Б, основную часть которой составляет ее касательная составляющая первого порядка F, определяемая известным образом
Fg : т г СсовЦ, +«.,, sinq,)),
где Cf, - угол между продольно
осью кривошипа 6 и линией, проходящей через центр 0-J кривошипного вала 7 параллельно упомяну- той линии В,В0.
Дополнительный коленный рцчаг 4 передает движение через ось 3коленного шарнира Р. на основной коленный рычаг 2 и через него - на ползун 1, совершающий возвратно-поступательно движение. При этом возникает сила инерции, составляющая первого порядка которой Fg определяется
ЕС га Гб Э€о()(созСр, + | , 58inq|, )Со5 .
Вращение от кривошипного вала и закрепленного па нем ведущего зубчатого колеса 12 передается на дополнительное зубчатое колесо 13 с тем же числом пубьев, установленное на дополнительном валу 14. В результат
5303438
дополнительный вал 14 врапается с угловой скоростью C0,j., равной угловой скорости кривошипного вала COj и направленной в противоположную ей сторону.
При вращении противовесов, закрепленных на кривошипном 7 и на допол- {ительном l4 валах, возникают центробежные силы инерции, величины которых определяются известным образом
10
П7
4-D
(D,5 -t-D,6 )
45 ,.)W
Pn,. (7
0
5
D,,, ВИЙ (1) и
Поскольку величины дисбалансов D ,„ ,
(3), а углы их установки oi. и ft выбраны в соответствии с изложенным алгоритмом, то, например, в положении I (фиг. О при углеСр, 0, когда инертщонные нагрузки максимальны, проекция остаточной силы инер1Ц1и первого порядка на продольную ось кривошипа 6 ляет велшшну
0-7 А::
состав
UF,
(q), 0)
+Е(. sin у
5
0
-F cosoi -Fn,
« m I
cos R
) )eo(), -ШдГбСО -0,5таГбСОт -0, -
-0,5m, ( Nj+ A)(
где )P arcsinC ae A,.) величина угла между продольной осью кривошипа 6 и ползуна 1 в положении I при (|) 0;
f
cos
« 1
Ы arcsin(mJ Эt 5 c J(
+ А))/(2тд ,) - величина угла установки радиусов центров масс противовесов 15 и 16 относительно линии 0 AQ продолжения кривошипа 6 в положении 1 ; cos od 1;
Р
агс81п
.2}i1: °i Si...
()( зеГ Л + 5г,Ч5)
величина угла установки радиусов центров масс противовесов 17 и 18 относительно линии, параллельной продольной оси OT АО кривошипа 6 в положении 1 ; cos f в 1 .
91530343
Проекция остаточной силы инерции первого порядка па ось, перпендикулярную продольной оси кривошипа 6 в положении I, при- угле Ср, 0, составляет величину
тсЭ€о( Аг- ЛО-пп 5 р
- --- - - - - - - -.«-., «..«. .
m +m,Qe (,)( 9t5 / + 5t V5)
Поскольку уравиовешипание сил
инерции первого порядка достигнуто
ГТт-
UF с; F,cosy -F sinc -F, sinp для углов Ц, 0 и L, , оно имеет
(.0)
10
) -(тд+0,5
У 2i5 lrai:3€j L±l3iJe 5,( Vii;A4)).
Hft +0,5пв
место и для всех остальных значений 1|| в положении I.
Пои переводе из положения I механизма регулировки хода ползуна 1 в другое положение противо,. . , „ч весы 15 и 16 устанавливают под другим -0.5(Ing+n,9e„()( Эe, + 9e,)rgCO, is у, продольной оси О,А криво™па 6, а противовес 17 и 18 - пол другим углом ( к линии, паралле Гьной продольной оси Ci-fA кривошипа 1. Кели- чины углов 0 и р определяют по описанному алгоритму. Дебалансные полу- муфты 15 и 17 сдвигают вдоль консолей 19 и 20 до их рассоединения с основными полумуфтами 21, поворачивают на требуемые углы и Л - 5 и вновь сдвигают вдоль консолей 19 и 20 до их соединения с основньши полуга 2«1о( Аг+:А4) тв+пl 9ef()( )
0.
20
Проекция остаточной силы инерции первого порядка на продольную ось О, А кривошипа 6 в положении I,
при угле Ц), составляет чину
вели25
&FX Fft-Fe-Fn7cose +F,cos р
(q .) ,
к );- -т(. Эео «.( Аг+ А) А5-ГбС07- -(пд +0,5 1Пь)ГбС07 +0,5(г1е, + -H3c9e,(a+ A4)( 3f3 v +9, A5)rgW
(гг+ А)ООт (0,5( Эе, Л 4+
+эе,5)- 9е,).
Поскольку расстояния от центров 30 масс противовесов до вертикальной плоскости (фиг.З), проходяще через центральную продольную ось ползуна 1 перпендикулярно оси кривошипного вала 7, выбраны из ус- ,с ловий (2) и (4), моменты сил инерци первого порядка относительно коорди натных осей, находящихся в упомянут плоскости, равны нулю.
Последний сомножитель представляет разность двух достаточно малых и близких по величине значений параметров кривошипно-коленного механизма высечных ножниц и близок к нулю.
Проекция остаточной силы инерции
первого порядка на ось, перпендику А гА5 нирно связанный с кривопшпным валом
лярную продольной оси кривоши- J
40 Формула изобретени
1Г угле Cf составляет величину
и несущий коленный шарнир, основной и дополнительные коленные рычаги, связанные с коленным шарниром, ползун, установленный в направляющих
и несущий коленный шарнир, основной и дополнительные коленные рычаги, связанные с коленным шарниром, ползун, установленный в направляющих
bFu -Fg+F sinoi-Р,д sin р с; - зо станины и связанный с основным колен(qi, чг/2)
. +(,5тв)ГбО X
X 2i5()4))
га д +0,5 п,.,
-0,5(mg,+tn(, Xo( + ) ( + Эе, А5)ГбСО X
55
ным рычаго, опорную ось, установленную на дополнительном коленном рычаге, и кривошипно-коромысловый механизм регулировки хода ползуна, свя- занньп с опорной осью, отличающиеся тем, что, с целью повышения производительности, они снаб- уравновепивлющим механизмом, вьшолненным в виде не менее двух
тсЭ€о( Аг- ЛО-пп 5 р
- --- - - - - - - -.«-., «..«. .
m +m,Qe (,)( 9t5 / + 5t V5)
20
вели25
муфтами 21 (фиг.З).
Поскольку расстояния от центров масс противовесов до вертикальной плоскости (фиг.З), проходящей через центральную продольную ось ползуна 1 перпендикулярно оси кривошипного вала 7, выбраны из ус- ловий (2) и (4), моменты сил инерции первого порядка относительно координатных осей, находящихся в упомянутой плоскости, равны нулю.
40 Формула изобретения
5
ным рычаго, опорную ось, установленную на дополнительном коленном рычаге, и кривошипно-коромысловый механизм регулировки хода ползуна, свя- занньп с опорной осью, отличающиеся тем, что, с целью повышения производительности, они снаб- уравновепивлющим механизмом, вьшолненным в виде не менее двух
и
1
противовесов, закрепленных на кривошипном валу по разные стороны относительно вертикальной плоскости, проходящей через продольную ось ползуна перпендикулярно оси кривошипного пала, дополнительного вала, установленного в опорах станины параллельно кривошипному валу, не менее двух дополнительных противовесов, закрепленных на дополнительном валу по разные стороны от упомянутой вертикальной плоскости, двух одинаковых зубчатых колес, закрепленных на кри- вошипноп валу и дополнительных валах с возмояностыэ взаимодействия между собой, при этом по крайней мере один из противовесов установлен с возможностью регулировочного поворота относительно своего вала.
лансов масс В,5И P, противовесов кривошипного вала выбраны из условий .
D,,,6
(тд +0,5n)rg;
0,5,5 .
де
П,5И
h,
Мб
т.
п,
дисбалансы масс противовесов, расположенных по одну сторону относительно упомянутой вертикальной г лоскости, и расстояние от нее до их центра;
дисбалансы масс противовесов, расположенных по другую сторону относительно упомянутой вертикальной плоскости, и расстояние от нее до их центра; масса кривошипа с приведенной частью массы шатуна;
часть массы шатуна и часть массы основного и дополнительного ко
рычагов, приве- к коленной оси;
12
ленных денные
tg - радиус кривормпа, дисбалансов масс R 7 щ в дополнительного вала условий
41 bD,e-0,5(rae+tn 9eo( «,V;
D 7hi7- ie
48
где D ,7 и
NT
IB
48
ИА
дисбалансы масс противовесов, расположенных по одну сторону относительно упомянутой вертикальной плоскости,и расстояние от нее до их центра;
дисбалансы масс противовесов, расположенных по другую сторону относительно упомянутой вертикальной плоскости, и расстояние от нее до их центра; масса ползуна с приведенной частью массы основного коленного рычага;
35 l rв/lг; 7 4 - 6/4J s i 6/l
S
Ч
Ч длины основного и дополнительного коленных рычагов;ly- длина шатуна;
( Ai+V;
9е, , /гв ; Э 1-ег/г ; Oe -ej/rg;
е - расстояние от оси кривошипного вала до линии, проходя щей через крайние положения коленной оси;
е - расстояние от линии, прохо- дядей через опорную ось параллельно продольной оси пол- эуна, до этой оси;
е - расстояние от той же линии, проходящей через опорную ось, до среднего положения коленной оси.
фг
Фмг
Редактор Л.Зайцева
Фиг.З
Составитель Ю.Филимонов Техред М.Дидык Корректор В.Кабаций
Заказ 7809/12
Тираж 831
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
fine
Подписное
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВКИ ХОДА ПОЛЗУНА | 1971 |
|
SU431000A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
