XI
О
со
k о ел

| название | год | авторы | номер документа |
|---|---|---|---|
| Кабельный кран | 1988 |
|
SU1558855A1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Кабельный кран | 1990 |
|
SU1730010A1 |
| Способ обмена информацией между модулями системы безопасности грузоподъемной машины и устройство для его осуществления | 2022 |
|
RU2778173C1 |
| Сдвоенный кабельный кран | 1985 |
|
SU1301769A1 |
| ВЕСОПОВЕРОЧНЫЙ КОМПЛЕКС | 2019 |
|
RU2712533C1 |
| Сдвоенный кабельный кран | 1976 |
|
SU583085A1 |
| ПУТЕУКЛАДЧИК ТРАКТОРНЫЙ | 2023 |
|
RU2808047C1 |
| Сдвоенный кабельный кран | 1978 |
|
SU765194A2 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
Использование: подъемно-транспортное оборудование, а именно, кабельные краны. Сущность изобретения: кабельный кран содержит опоры, перемещающиеся по подкрановым путям. На опорах закреплен несущий канат, на котором установлена грузовая тележка с грузозахватным органом, перемещающаяся посредством тягового каната, закрепленного на тяговой лебедке. На пункте управления, находящемся вне зоны действия кабельного крана, установлено устройство дистанционного управления, содержащее раму 8, на которой установлены винт 9, связанный с электродвигателем 10 через редуктор 11, сельсин-приемник 12, электрически соединенный с сельсин-датчиком, установленным на холостом колесе подбашенной тележки кабельного крана, направляющие 15 с перемещающейся по ним кареткой 16, имитирующей перемещение опор, по подкрановым путям, каретка 16 снабжена электродвигателем 17, который через редуктор 18 вращает винт 19 с ползуном 20, перемещающимся по винту 19 и направляющим 21 (имитация перемещения грузовой тележки по несущему канату). Ползун 20 снабжен бесконтактным конечным выключателем, взаимодействующим с диском 23, в соответствующем масштабе отображающим форму засыпаемого бассейна, и бесконтактным конечным выключателем 24, взаимодействую« Ё
Г1 #4fJ
Оигг
щим с ползуном 25, перемещающимся по направляющим 21 и винту 26 (окончание работы грузозахватного органа). Винт 26 соединен с редуктором 18 через электромагИзобретение относится к подьемно- транспортному машиностроению, в частности к кабельным кранам с дистанционным управлением,
ЙзвестетТЈаТэел ьнь1й кран, содержащий опирающиеся,, на р ёТтъ сЫые пути якорную тележ Й к о нтртележку, на которых закреплены несущий йнат с грозовой тележкой и отклоняющие блоки для тягового и подъемного канатов, причем на якорной тележке установлен привод подъема, на барабан которого навит один конец подъемного каната.
Известен также кабельный кран, содержащий две подвижные опоры, перемещающийся по параллельным крановым путям, между которыми натянут несущий канат, по которому посредством тягового каната перемещается грузовая тележка, а подъем и опускание груза осуществляется посредством крюковой подвески, подвешенной на грузовом канате, запасованном через блоки грузовой тележки,
Общим недостатком данных кабельных кранов является наличие кабин управления в зоне действия кранов, что не всегда допустимо, невозможность точной остановки грузовой тележки в момент начала работы грузозахватного органа и фиксации ее положения при окончании разгрузки грузозахватного органа.
Целью изобретения является расширение эксплуатационных возможностей.
Указанная цель достигается тем, что кабельный кран, содержащий две установленные на параллельных путях подбашенные тележки, одна из которых имеет холостое колесо, размещенные на тележках башни, между которыми натянут несущий канат с грузовой тележкой, соединенной с тяговым канатом, закрепленным на тяговой лебедке, грузозахватный орган, подвешенный на грузовом канате, запасованном через блоки грузовой тележки, и пульт управления, снабжен устройством дистанционного управления, установленным на пульте управления, и двумя сельсин-датчиками, один из которых размещен на тяговой лебедке, а другой - на холостом колесе, при этом устройство дистанционного управления выполнено в виде рамы с направляющими и установленными на ней копиром для повторения в маснитную муфту 27. Электродвигатель 17 соединен с сельсин-приемником, электрически связанным с сельсин-датчиком, установленным на тяговой лебедке. 5 ил.
штабе контура обслуживаемого объекта, винтом, связанным через редуктор и электродвигатель с сельсин-приемником, электрически соединенным с сельсин-датчиком,
расположенным на холостом колесе, и установленной в направляющих и соединенной с упомянутым винтом каретки, имеющей связанные через редуктор и электродвигатель с сельсин-приемником, электрически
соединенным сельсин-датчиком на тяговой лебедке, два дополнительных винта с установленными на них с возможностью взаимодействия ползунами, причем один винт соединен с редуктором посредством электромагнитной муфты, а на ползуне другого винта установлены два бесконтактных датчика; первый -для взаимодействия с другим ползуном, второй для взаимодействия с упомянутым копиром, при этом пульт управления размещен вне рабрчей зоны крана.
На фиг.1 изображен кабельный кран, общий вид; на фиг.2 - устройство дистанционного управления кабельным краном, вид спереди; на фиг.З - разрез А-А на фиг.2; на
фиг.4 - вид Б, план на фиг.2; на фиг.5 - разрез В-В на фиг.2.
Кабельный кран содержит подвижные опоры 1 и 2, перемещающиеся по подкрановым путям (не показаны), на которых эакреплен несущий канат 3, на котором установлена грузовая тележка 4 с грейфером 5, перемещающаяся посредством тягового каната 6, закрепленного на тяговой лебедке 7.
На пульте управления вне зоны действия кабельного крана (не показан) установлено устройство дистанционного управления, содержащее раму 8, на которой установлен винт 9, связанный с электродвигателем 10 через редуктор 11. Управляющее напряжение на электродвигатель 10 подается с сельсин-приемника 12, установленного на раме 8 и электрически связанного с сельсин-датчиком 13, установленным на
холостом колесе подбашенной тележки 14 кабельного крана.
На раме 8 установлены направляющие 15, по которым перемещается каретка 16 посредством винта 9, Перемещение каретки
16 посредством винта 9 отображает перемещение опор 1 и 2 по подкрановым путям кабельного крана.
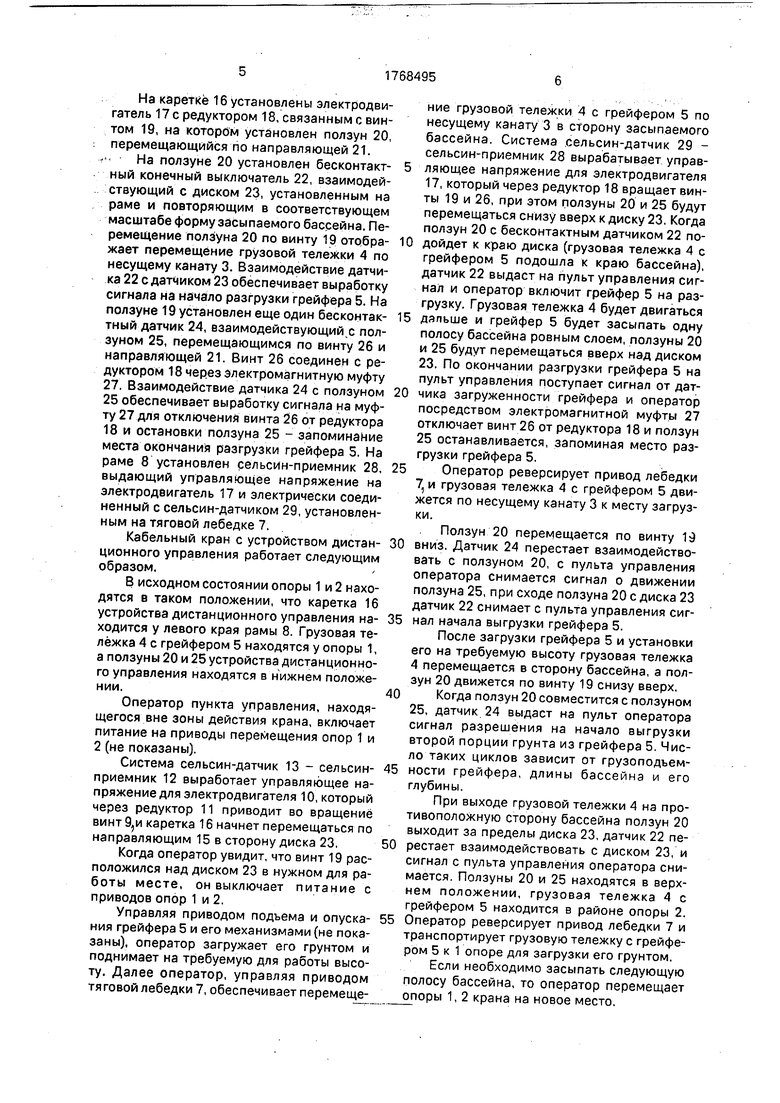
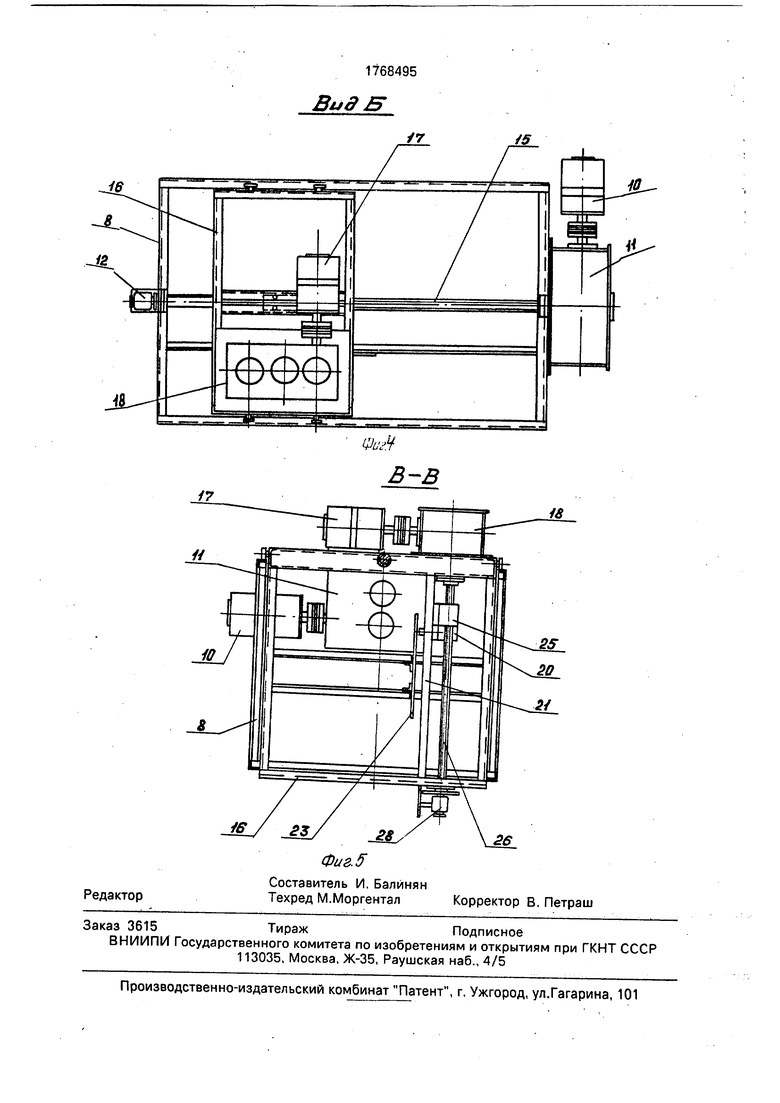
На каретке 16 установлены электродвигатель 17с редуктором 18, связанным с винтом 19, на котором установлен ползун 20, перемещающийся по направляющей 21.
На ползуне 20 установлен бесконтактный конечный выключатель 22, взаимодействующий с диском 23, установленным на раме и повторяющим в соответствующем масштабе форму засыпаемого бассейна. Перемещение ползуна 20 по винту 19 отображает перемещение грузовой тележки 4 по несущему канату 3. Взаимодействие датчика 22 с датчиком 23 обеспечивает выработку сигнала на начало разгрузки грейфера 5. На ползуне 19 установлен еще один бесконтактный датчик 24, взаимодействующий ползуном 25, перемещающимся по винту 26 и направляющей 21. Винт 26 соединен с редуктором 18 через электромагнитную муфту 27. Взаимодействие датчика 24 с ползуном 25 обеспечивает выработку сигнала на муфту 27 для отключения винта 26 от редуктора 18 и остановки ползуна 25 - запоминание места окончания разгрузки грейфера 5. На раме 8 установлен сельсин-приемник 28, выдающий управляющее напряжение на электродвигатель 17 и электрически соединенный с сельсин-датчиком 29, установленным на тяговой лебедке 7.
Кабельный кран с устройством дистанционного управления работает следующим образом.
В исходном состоянии опоры 1 и 2 находятся в таком положении, что каретка 16 устройства дистанционного управления находится у левого края рамы 8. Грузовая тележка 4 с грейфером 5 находятся у опоры 1, а ползуны 20 и 25 устройства дистанционного управления находятся в нижнем положении.
Оператор пункта управления, находящегося вне зоны действия крана, включает питание на приводы перемещения опор 1 и 2 (не показаны).
Система сельсин-датчик 13 - сельсин- приемник 12 выработает управляющее напряжение для электродвигателя 10, который через редуктор 11 приводит во вращение винт каретка 16 начнет перемещаться по направляющим 15 в сторону диска 23,
Когда оператор увидит, что винт 19 расположился над диском 23 в нужном для работы месте, он выключает питание с приводов опор 1 и 2.
Управляя приводом подъема и опускания грейфера 5 и его механизмами (не показаны), оператор загружает его грунтом и поднимает на требуемую для работы высоту. Далее оператор, управляя приводом тяговой лебедки 7, обеспечивает перемещение грузовой тележки 4 с грейфером 5 по несущему канату 3 в сторону засыпаемого бассейна. Система сельсин-датчик 29 - сельсин-приемник 28 вырабатывает управляющее напряжение для электродвигателя 17, который через редуктор 18 вращает винты 19 и 26, при этом ползуны 20 и 25 будут перемещаться снизу вверх к диску 23. Когда ползун 20 с бесконтактным датчиком 22 по0 дойдет к краю диска (грузовая тележка 4 с грейфером 5 подошла к краю бассейна), датчик 22 выдаст на пульт управления сигнал и оператор включит грейфер 5 на разгрузку. Грузовая тележка 4 будет двигаться
5 дапьше и грейфер 5 будет засыпать одну полосу бассейна ровным слоем, ползуны 20 и 25 будут перемещаться вверх над диском 23. По окончании разгрузки грейфера 5 на пульт управления поступает сигнал от дат0 чика загруженности грейфера и оператор посредством электромагнитной муфты 27 отключает винт 26 от редуктора 18 и ползун 25 останавливается, запоминая место разгрузки грейфера 5.
5 Оператор реверсирует привод лебедки 7, и грузовая тележка 4 с грейфером 5 движется по несущему канату 3 к месту загрузки.
Ползун 20 перемещается по винту 19
0 вниз. Датчик 24 перестает взаимодействовать с ползуном 20, с пульта управления оператора снимается сигнал о движении ползуна 25, при сходе ползуна 20 с диска 23 датчик 22 снимает с пульта управления сиг5 нал начала выгрузки грейфера 5.
После загрузки грейфера 5 и установки его на требуемую высоту грузовая тележка 4 перемещается в сторону бассейна, а ползун 20 движется по винту 19 снизу вверх.
0Когда ползун 20 совместится с ползуном
25, датчик 24 выдаст на пульт оператора сигнал разрешения на начало выгрузки второй порции грунта из грейфера 5. Число таких циклов зависит от грузоподъем5 ности грейфера, длины бассейна и его глубины.
При выходе грузовой тележки 4 на противоположную сторону бассейна ползун 20 выходит за пределы диска 23, датчик 22 пе0 рестает взаимодействовать с диском 23, и сигнал с пульта управления оператора снимается. Ползуны 20 и 25 находятся в верхнем положении, грузовая тележка 4 с грейфером 5 находится в районе опоры 2.
5 Оператор реверсирует привод лебедки 7 и транспортирует грузовую тележку с грейфером 5 к 1 опоре для загрузки его грунтом.
Если необходимо засыпать следующую полосу бассейна, то оператор перемещает опоры 1, 2 крана на новое место.
Применение изобретения позволит расширить эксплуатационные возможности крана, т.к. позволяет управлять его работой дистанционно, не из зоны работы крана. Устройство дистанционного управления по- зволяет повысить точность начала разгрузки грейфера, фиксировать место окончания разгрузки и, следовательно, определять начала разгрузки следующей порции грунта в бассейн..
Формула изобретения Кабельный кран, содержащий две, установленные на параллельных путях подбашенные тележки, одна из которых имеет холостое колесо, размещенные на тележках башни, между которыми натянут несущий канат с грузовой тележкой, соединенной с тяговым канатом, закрепленным на тяговой лебедке, грузозахватный орган, подвешенный на грузовом канате, запасованном че- рез блоки грузовой тележки, и пульт управления, отличающийся тем, что, с целью расширения эксплуатационных возможностей, он снабжен устройством дистанционного управления, установленным на пульте у правления, и двумя сельсин-дат // /wtv/7/ //////
///// /////////////////////
Физ.1
чиками, один из которых размещен на тяговой лебедке, а другой - на холостом колесе, при этЧэм устройство дистанционного управления выполнено в виде рамы с направляющими и установленными на ней копиром для повторения в масштабе контура обслуживаемого объекта, винтом, связанным через редуктор и электродвигатель с сельсин-приемником, электрически соединенным с сельсин-датчиком, расположенным на холостом колесе, и установленной в направляющих и соединенной с упомянутым винтом каретки, имеющей связанные через редуктор и электродвигатель с сельсин-приемником, электрически соединенным с сельсин-датчиком на тяговой лебедке два дополнительных винта с установленными на них с возможностью взаимодействия ползунами, причем один винт соединен с редуктором посредством электромагнитной муфты, а на ползуне другого винта установлены два бесконтактных датчика, первый - для взаимодействия с другим ползуном, второй -для взаимодействия с упомянутым копиром, при этом пульт управления размещен вне рабочей зоны крана.
/
// ///
ГJ ////////////
л-л
Фи&З
Ji-
в-в
18
| Справочник по кранам /под ред | |||
| М.М | |||
| Гохберга, том 2, М.; Машиностроение, с | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
