Изобретение относится к машиностроению, преимущественно к автостроению и тракторостроению,и может быть использовано для дистанционного управления механическими коробками передач автомобилей, тракторов, дорожно-строительных машин.
Наиболее близким к предлагаемому техническому решению является исполнительный механизм, содержащий управляющий элемент, выполненный в виде четырехгранной прямоугольной призмы, грани которой размещены перпендикулярно направлениям перемещения управляющего элемента и на них выполнены параллельными плоскости перемещения управляющего элемента пазы, а взаимообращенные концы штоков установлены з соответствующих направляющих пазах призмы с возможностью перемещения по ним 1 ,
К недостаткам данного механизма относится недостаточная надежность его работы, обусловленная сложностью контроля за процессом переключения передач,
Целью изобретения является повышение надежности за счет упрощения контроля процесса переключения передач.
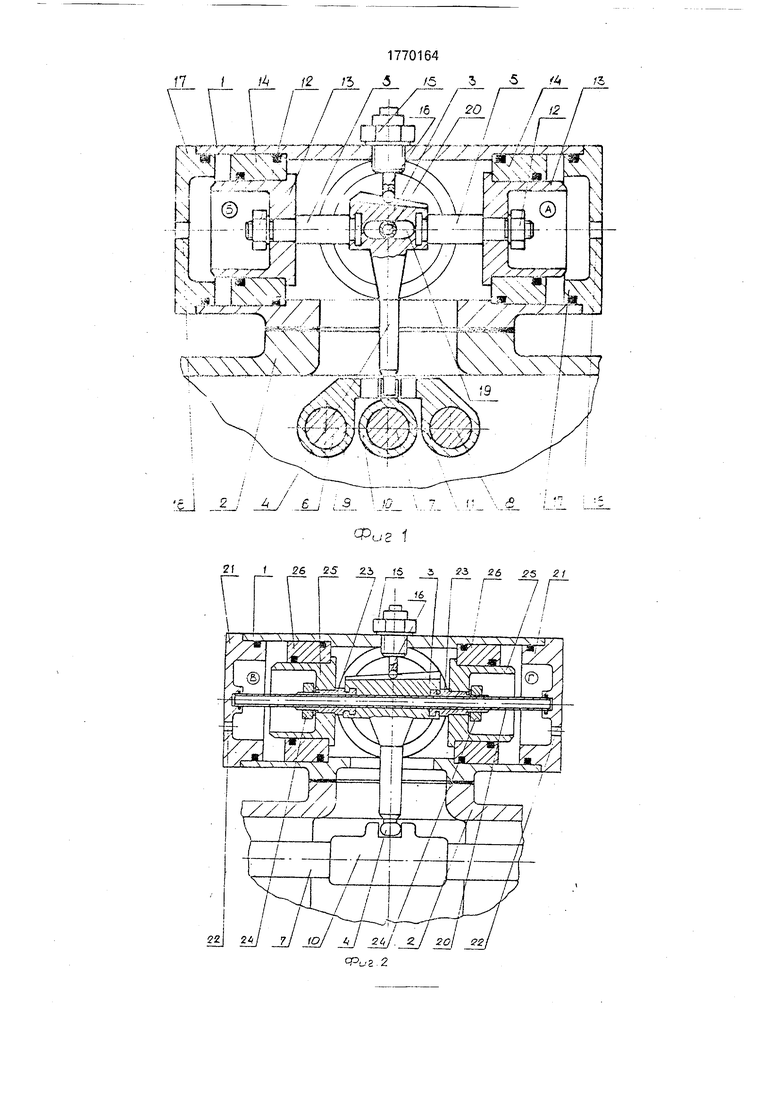
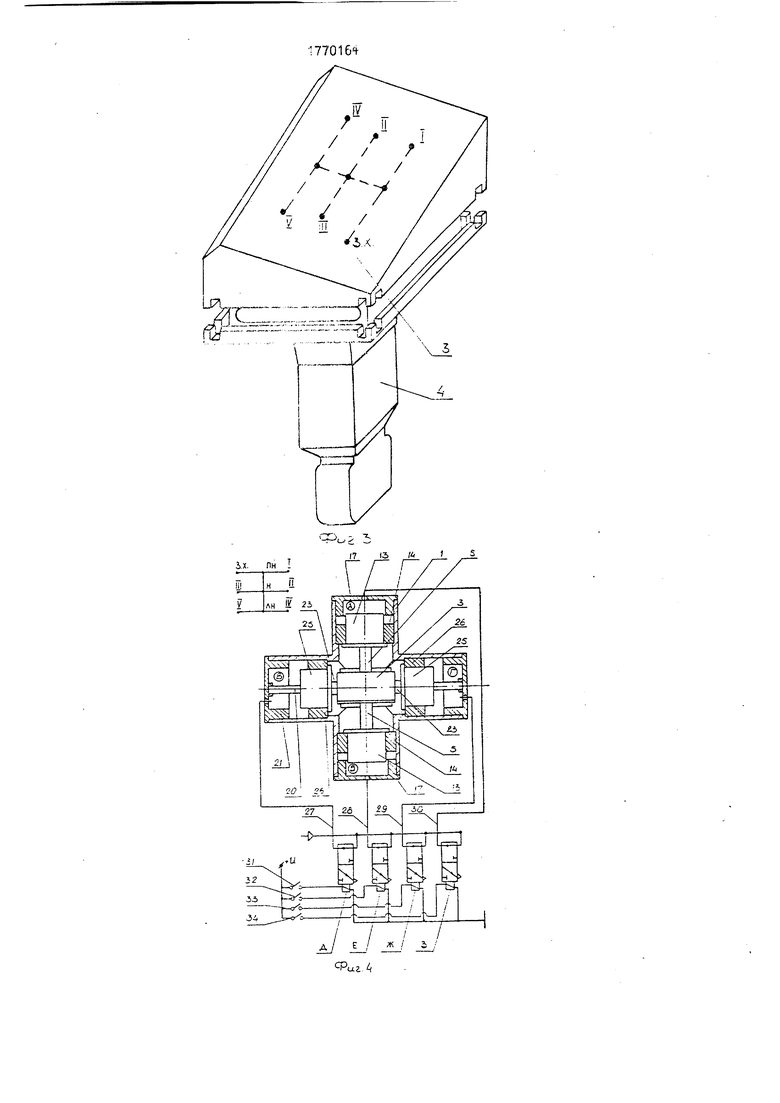
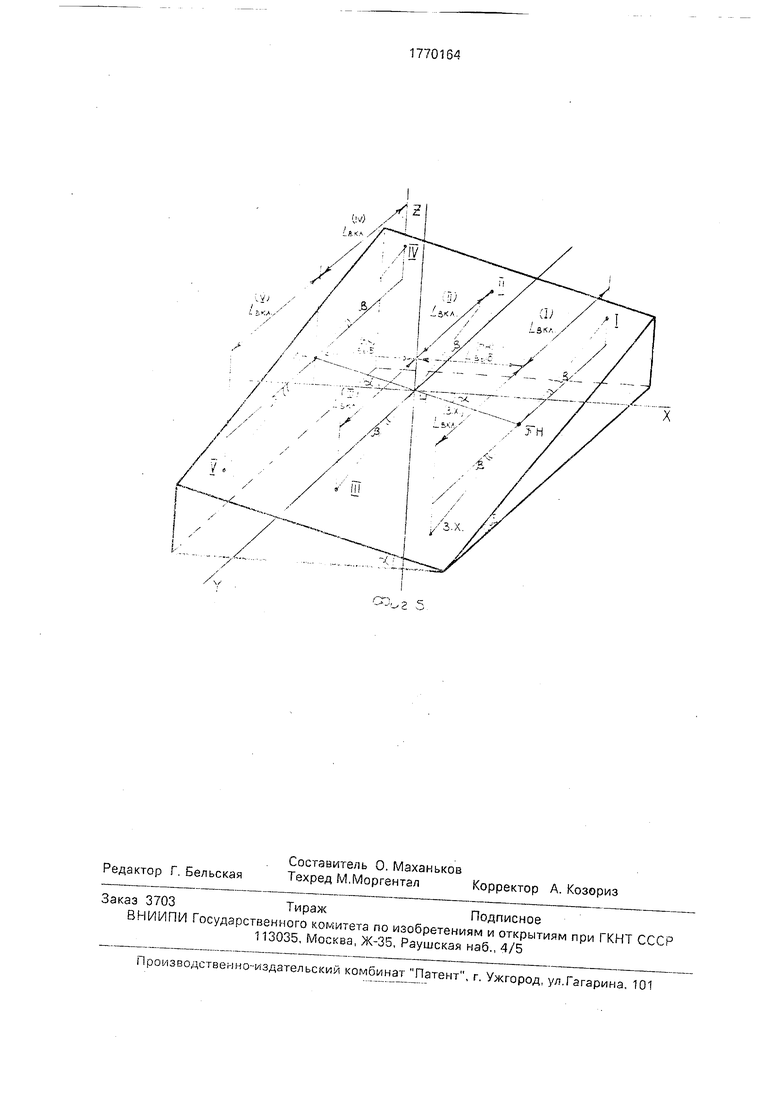
На фиг. 1 показан цилиндр выбора механизма переключения передач; на фиг. 2 - цилиндр включения передач; на фиг. 3 - управляющий элемент механизма переключения передач; на фиг. 4 - схема механизма переключения передач, вид сверху; на фиг. 5 - схема для определения положения осеподвижного стержня датчика линейного перемещения,
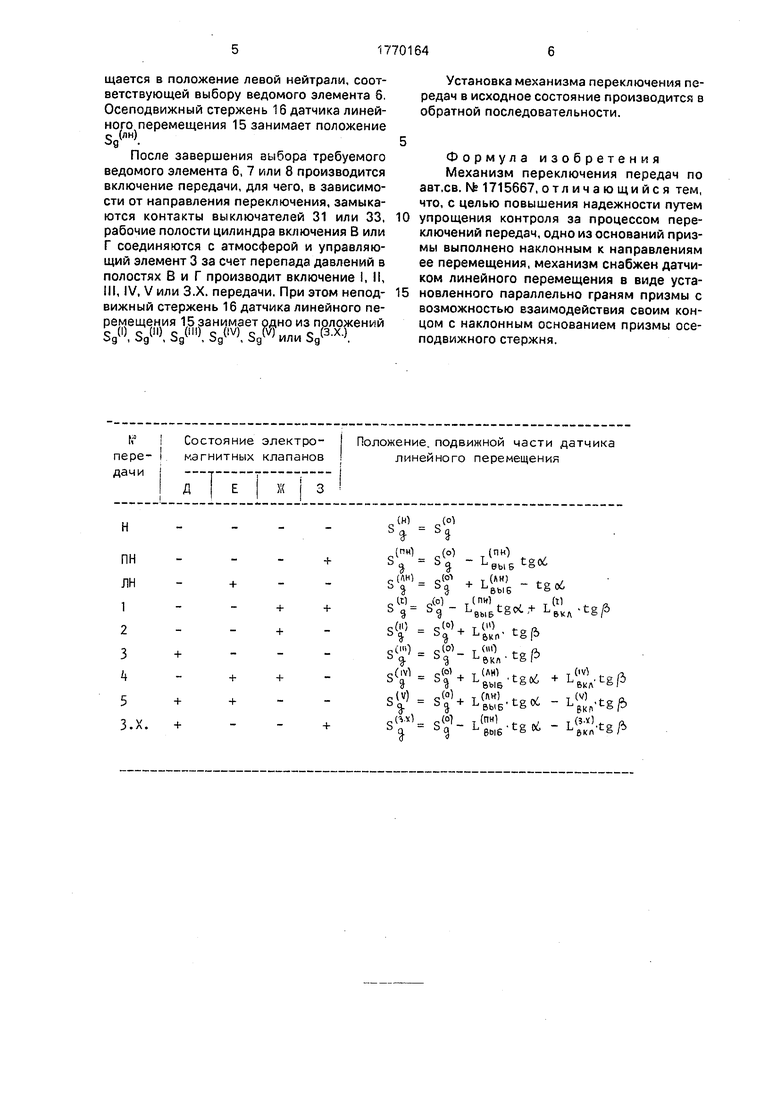
В таблице приведены зависимости положения осеподвижного стержня датчика линейного перемещения от состояния элек- тропневмоклапанов механизма переключения передач.
Корпус 1 механизма переключения передач, снабженный внутренней расточкой, установлен на крышке коробки передач 2 и является общим для цилиндров выбора и
О
ь
ч
N
включения передач, оси которых взаимно перпендикулярны и расположены в плоскости перемещения управляющего элемента 3, а диаметры цилиндров выполнены одинаковыми, Управляющий элемент 3, имею- щий в нижней части выступ 4, выполнен в виде призмы, грани которой размещены перпендикулярно направлениям его перемещений при выборе,и включении передач и на нихвыполнены параллельные плоско- сти перемещения управляющего элемента 3 направляющие пазы, а одно из оснований призмы выполнено наклонным к направлениям ее перемещения, В первой паре направляющих пазов, выполненных на гранях управляющего элемента 3 параллельных плоскости его перемещения в направлении включения перецзч„устаковлены с возможностью перемещения по ним взаимообращенные концы штокоз 5 цилиндра выбора передач. Выступ 4 управляющего элемента 3 в направлении выбора ведомых элементов коробки передач 6, 7, 8 размещен с возможностью взаимодействия с их поводками 9, 10, 11. Штоки 5 цилиндра выбора передач при помощи гаек 12 соединены со ступенчатыми поршнями 13, устновленными по внешнему диаметру меньшей ступени в кольцевых поршнях 14, размещениях, в свою очередь, по внешнему диаметру в кор- пусе 1. В верхней части корпуса 1 соосно с осью симметрии цилиндров выбора и включения передач установлен датчик линейного перемещения 15, осеподвижный стержень которого сопрягается с наклонным основа- нием управляющего элемента 3. Кольцевые поршни 14 установлены с возможностью взаимодействия с уступами, образованными внутренней расточкой цилиндра выбора и крышками 17, установленными на концах последнего. Для подвода/отвода рабочей среды под давлением при выборе передач в крышках 17 выполнены отверстия 18. В управляющем элементе 3 в направлении включения передач выполнена сквозная прорезь 19, в которой размещена направляющая цилиндра включения передач 20, установленная в крышках цилиндра включения передач 21, снабженных отверстиями для подвода/отвода рабочей среды под давлением 22. Во второй паре направляющих пазов, выполненных на гранях управляющего элемента 3 параллельных плоскости его перемещения в направлении выбора передач, установлены с возможно- стью перемещения по ним взаимообращенные концы штоков 23 цилиндра включения передач, которые при помощи гаек 24 соединены со ступенчатыми поршнями 25, Ступенчатые поршни 25 установлены по
внешнему диаметру меньшей ступени в кольцевых поршнях 26, размещенных, в свою очередь, по внешнему диаметру в корпусе 1 механизма переключения передач с возможностью взаимодействия с уступами, образованными внутренней расточкой цилиндра включения передач и крышками 21.
Корпус 1 механизма переключения передач совместно со ступенчатыми поршнями 13, кольцевыми поршнями 14, крышками 17 образуют рабочие полости цилиндра выбора передач А и Б, а совместно со ступен- чатыми поршнями 25, кольцевыми поршнями 26 и крышками 22 - рабочие полости цилиндра включения передач В и Г.
Рабочие полости механизма переключения передач посредством трубопроводов 27, 38, 39 и 30 соединены с электропневмок- лапанами Д, Е, Ж и 3, электрически связанным с выключателями 31, 32, 33 и 34 (фиг. 4).
Механизм переключения передач работает следующим образом.
Выбор и включение передач производится из положения общей нейтрали, в котором выключатели 31, 32. 33 и 34 разомкнуты и рабочая среда под давлением через электропневмоклапаны Д, Е, Ж и 3 трубопроводы 27, 28, 29 и 30 поступает в рабочие полости механизма переключения передач А, Б, В и Г. При этом управляющий элемент 3 устанавливается ступенчатыми поршнями 13 и 25 и кольцевыми поршнями 14 и 26 в положение общей нейтрали, соответствующее выбору среднего ведомого элемента 7, как это показано на фиг. 1, 2 и 4, а осеподвижный стержень 16 датчика линейного перемещения 15 занимает некоторое положение Sg H . При замыкание контактов выключателя 34 питающее напряжение подается на электропневмоклапан 2 и рабочая полость 4 цилиндра выбора передач соединяется с атмосферой, после чегс управляющий элемент 3 за счет перепада давлений в рабочих полостях А и Б перемещается в положение правой нейтрали, соответствующее выбору ведомого элемента 8 Осеподвижный стержень 16 датчика линейного перемещения при этом занимает положение Sg ni4 После снятия напряжения с электропневмоклапана 3 управляющий элемент 3 возвращается в положение об щей нейтрали. При замыкании контактов выключателя 32 питающее напряжение по дается на электропневмоклапан Е и рабо чая полость Б цилиндра выбора переда1- соединяется с атмосферой, после чего управляющий элемент 3 за счет перепад давлений в рабочих полостях А и Б переме
щается в положение левой нейтрали, соответствующей выбору ведомого элемента 6. Осеподвижный стержень 16 датчика линейного перемещения 15 занимает положение
5д(ЛН).
После завершения выбора требуемого ведомого элемента 6, 7 или 8 производится включение передачи, для чего, в зависимости от направления переключения, замыкаются контакты выключателей 31 или 33, рабочие полости цилиндра включения В или Г соединяются с атмосферой и управляющий элемент 3 за счет перепада давлений в полостях В и Г производит включение I, II, III, IV, V или З.Х. передачи. При этом неподвижный стержень 16 датчика линейного перемещения 15 занимает одно из положений
S/, S, SgM , Sg ИЛИ Sg.
Установка механизма переключения передач в исходное состояние производится в обратной последовательности.
Формула изобретения Механизм переключения передач по авт.св. № 1715667, отличаю щи и с я тем, что, с целью повышения надежности путем
упрощения контроля за процессом переключений передач, одно из оснований призмы выполнено наклонным к направлениям ее перемещения, механизм снабжен датчиком линейного перемещения в виде установленкого параллельно граням призмы с возможностью взаимодействия своим концом с наклонным основанием призмы осе- подвижного стержня.
-8
00
-J о
-ь
о
-p
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм переключения передач | 1989 |
|
SU1715667A1 |
| Система командного управления коробкой передач | 1989 |
|
SU1684116A1 |
| МЕХАНИЗМ АВТОМАТИЗИРОВАННОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 1991 |
|
RU2015936C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 1991 |
|
RU2015937C1 |
| МЕХАНИЗМ АВТОМАТИЗИРОВАННОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 2003 |
|
RU2241610C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРИВОД КОРОБКИ ПЕРЕДАЧ | 2011 |
|
RU2486072C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ МЕХАНИЗМОМ ПЕРЕКЛЮЧЕНИЯ КОРОБКИ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2170678C1 |
| Система управления составной коробкой передач транспортного средства | 1990 |
|
SU1710377A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ПРИВОДОМ МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2006 |
|
RU2327203C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ПРИВОДОМ МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2008 |
|
RU2374092C1 |
Изобретение относится к машиностроению, а именно к механизмам переключения передач в коробках передач. Цель - повышение надежности механизма переключения передач - достигается за счет упрощения контроля за процессом переключения передач. В корпусе механизма установлен датчик линейного перемещения в виде осеподвижного стержня, своим концом взаимодействующего с наклонным основанием управляющего элемента в виде призмы. Положение элементов механизма переключения контролируется положением стержня. 5 ил, 1 табл.
| Механизм переключения передач | 1989 |
|
SU1715667A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
