Изобретение относится к устройствам, применяемым в строительстве для захвата неперевязанных пакетов кирпича, их подъема и доставки непосредственно на стройплощадку.
Цель изобретения - повышение надежности захвата,
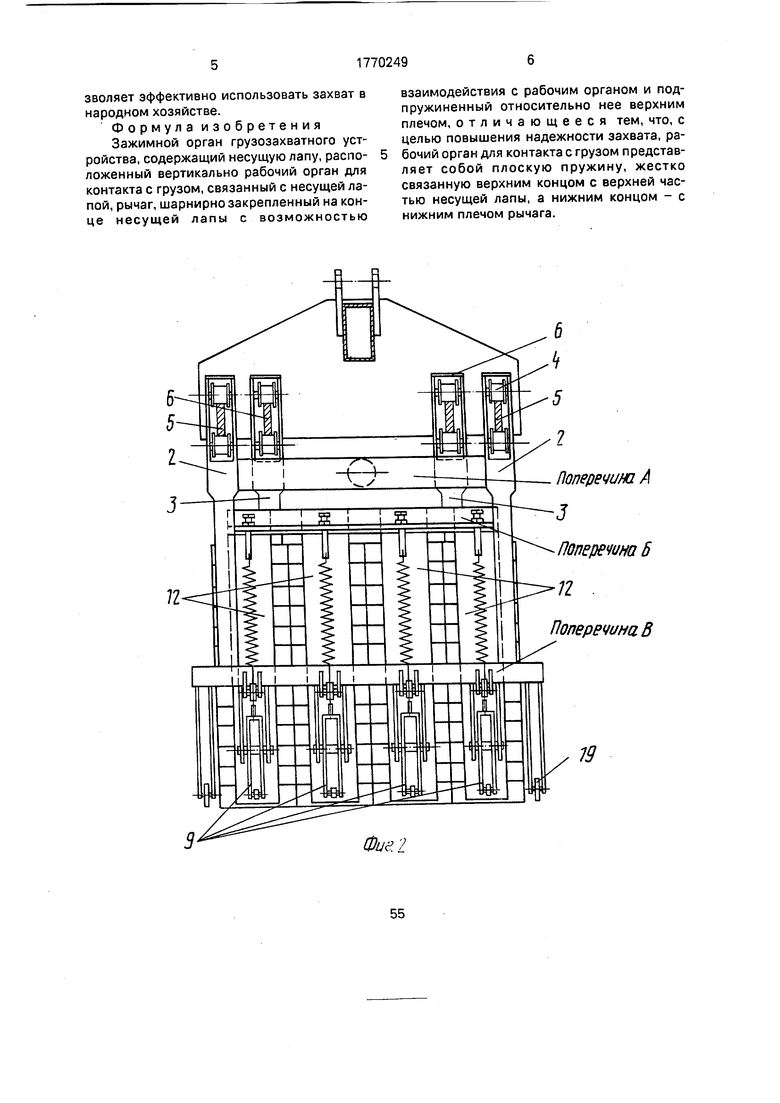
На фиг. 1 показан захват, общий вид (пакет кирпича зажат); на фиг. 2 - то же, вид сбоку; на фиг. 3 у тд.же. захват наводится на пакет кирпича. „ , „
ЗажимжЗй орган грузозахватного устройства состоит из4 корпуса 1, несущих лап 2 и 3, которые перемещаются друг относительно друга на роликах 4 по направляющим рейкам 5 и 6. Каждая из несущих лап 2 и 3, состоит из двух Г-образных кронштейнов, связанных между собой тремя поперечными балками А, Б. В. Перемещение несущих лап 2, 3 осуществляется при помощи гидроцилиндра 7. На концах несущих лап 2 и 3 установлены с возможностью качания вокруг горизонтальной оси 8 рычаги 9. Нижний конец этих рычагов через установленный на нем ролик 10 контактируете зажимной пластиной 11, установленной на нижнем конце плоской пружины 12, жестко связанный с верхней частью несущих лап 2 иЗ.
Верхний конец рычага 9 через трос 13, отводной блок 14 и пружину растяжения 15 соединен с несущими лапами 2 и 3. Отводной блок 14 служит для того, чтобы пружину 15 можно было установить вертикально. Такое расположение пружины позволяет, не увеличивая габариты захвата, выполнить ее с малой жесткостью, т, е. с пологой силовой характеристикой.
Для изменения натяжения пружины 15 предусмотрен регулировочный винт 16, установленный в верхней части несущих лап 2 и 3. При раздвинутом положении несущих лап для фиксации положения рычагов 9 предусмотрен упор 17. Для предохранительного обжатия всего пакета в целом предусмотрена упругая прокладка 18, закрепленная к внутренней поверхности плоской пружины 12. По концам несущихлап на кронштейнах смонтированы ролики 19, служащие для установки захвата на поверхности так, чтобы нижняя кромка зажимной пластины 11 была несколько выше поверхности установки. Для надежного захвата всего пакета кирпичей захват имеет на каждой несущей лапе 2 и 3 столько рычагов 9, сколько вертикальных рядов кирпичей в плоскости зажатия, Таким образом, каждый вертикальный ряд пакета кирпичей зажимается независимо от другого. К базовой машине захват крепится с помощью проушин 20.
Захват работает следующим образом. Захват с разведенными до упора в боковые стенки корпуса 1 несущими лапами 2 и 3 наводится базовой машиной на пакет кирпича так, чтобы он был примерно симметричен пакету и опускается на поверхность, опираясь на ролики 19 (фиг. 3). После этого
в гидроцилиндр 7 подается масло и несущие лапы 2 и 3 начинают перемещаться навстречу друг к другу на роликах 19.
При разведенных несущих лапах 2 и 3 предварительно растянутая пружина 15 поворачивает рычаг 9, пока верхний его конец не подойдет к упору 17, При этом нижний конец рычага 9 через ролик 10, изгибая плоскую пружину 12, приближает зажимную пластину 11 к центру захвата. При подходе
зажимных пластин 11 к поверхности кирпича нижний конец рычага 9 останавливается. При дальнейшем движении лап 2 и 3 друг к другу рычаг 9 поворачивается вокруг горизонтальной оси 8 и своим верхним концом
через трос 13 и обводной ролик 14 растягивает пружину 15, передавая возрастающее в ней усилие через нижнюю часть рычага на зажимную пластину 11. Пружина 15 отрегулирована при помощи винта 16 таким образом, что усилие, необходимое для удержания пакета кирпичей, достигает своей величины в то время, когда плоские пружины 12 занимают вертикальное положение. В это время упругая прокладка 18
прижимается к верхним слоям пакета кирпичей, предохраняя их от смещения. Так как каждый вертикальный ряд зажимается своими рычагом и пружиной, то отличие в усилии зажатия различных по допуску
линейных размеров кирпичей будет незначительным. Также незначительным будет разница в усилие зажатия пакета при перетечке масла в гидроцилиндре. После переноски на место разгрузки захват с пакетом
кирпича устанавливается на ролики 19, подается масло в гидроцилиндр 7 и лапы 2 и 3 расходятся, освобождая пакет кирпича.
Зажимной орган заявленной конструкции обеспечивает надежный захват пакета
кирпичей, т, к. введение в конструкцию плоской пружины, жестко связанной верхним концом с верхней частью несущей лапы, а нижним концом - с нижним плечом рычага, позволило зажимать каждый вертикальный
ряд самостоятельно. В связи с тем, что зажатие осуществляется пружиной малой жесткости, при деформации кирпичей или перетечке масла в гидроцилиндре из одной полости в другую усилие зажатия существенно не изменится. Это преимущество позволяет эффективно использовать захват в народном хозяйстве.
Формула изобретения Зажимной орган грузозахватного устройства, содержащий несущую лапу, расположенный вертикально рабочий орган для контакта с грузом, связанный с несущей лапой, рычаг, шарнирно закрепленный на конце несущей лапы с возможностью
взаимодействия с рабочим органом и подпружиненный относительно нее верхним плечом, отличающееся тем, что, с целью повышения надежности захвата, рабочий орган для контакта с грузом представляет собой плоскую пружину, жестко связанную верхним концом с верхней частью несущей лапы, а нижним концом - с нижним плечом рычага.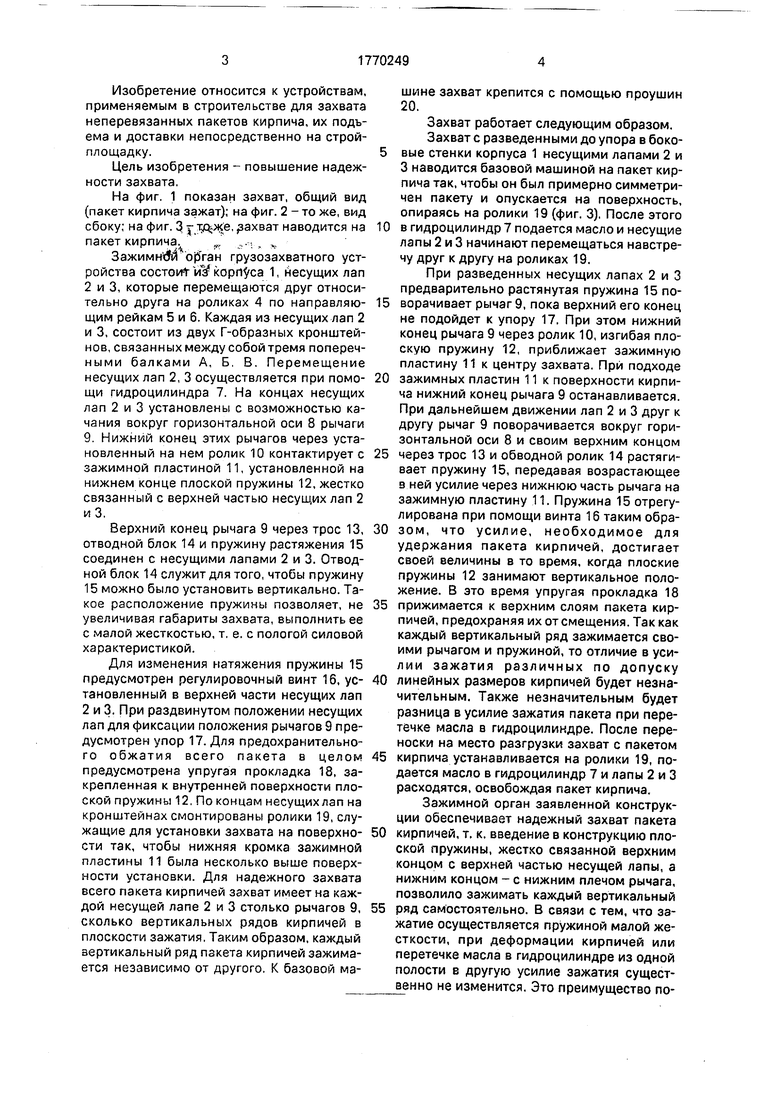
| название | год | авторы | номер документа |
|---|---|---|---|
| Пакеторазборная машина для штучных грузов | 1989 |
|
SU1708728A2 |
| Пакеторазборная машина для штучных грузов | 1987 |
|
SU1470634A1 |
| Пакеторазборная машина для штучных грузов | 1988 |
|
SU1615100A2 |
| Захватное устройство для бесподдонных пакетов кирпича | 1979 |
|
SU895882A1 |
| ВИЛОЧНЫЙ ЗАХВАТ ДЛЯ ПАКЕТИРОВАННЫХ ГРУЗОВ | 1969 |
|
SU233858A1 |
| Захватное устройство для подъема и транспортирования пакетов кирпича | 1980 |
|
SU895884A1 |
| Перекладчик кирпича с комплектовочного стола на печную вагонетку | 1982 |
|
SU1074726A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Машина для контактной стыковой сварки рельсов | 1975 |
|
SU634648A3 |
| ЗАХВАТНОЕ УСТРОЙСТВО К ПОГРУЗЧИКУ ДЛЯ ПАКЕТАКИРПИЧА | 1969 |
|
SU234225A1 |
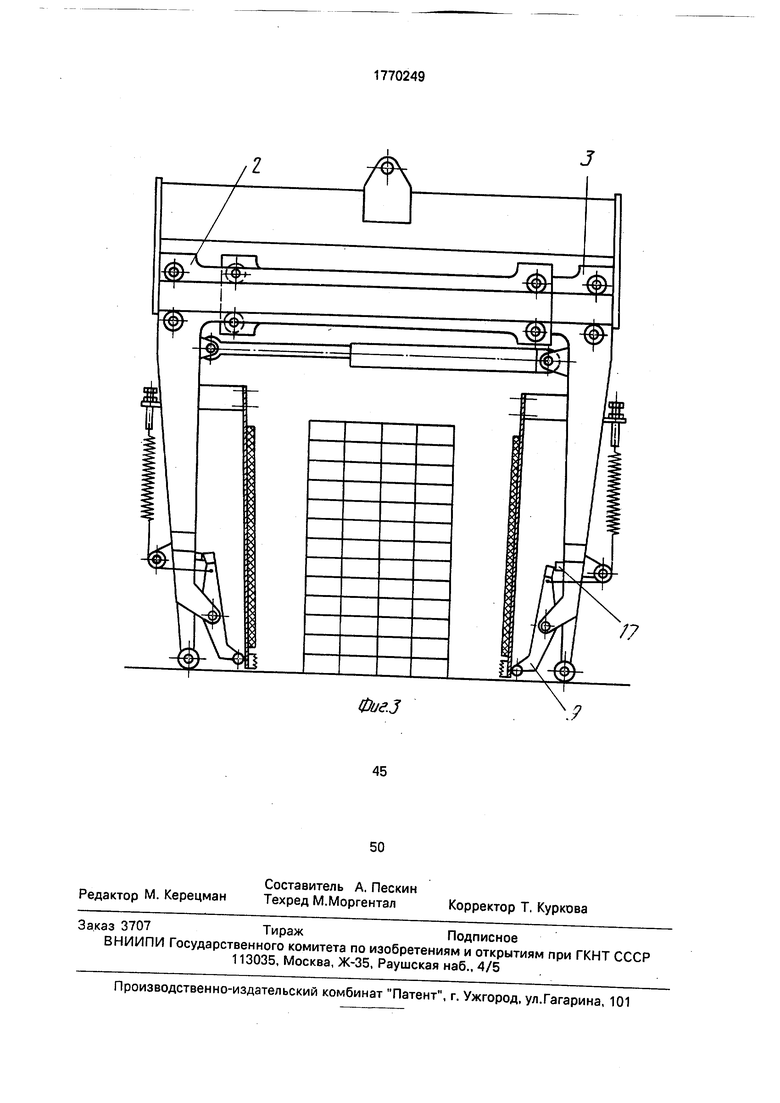
Использование: в подъемно-транспортном оборудовании при захвате груза, в частности неперевязанных пакетов кирпича. Сущность изобретения: при разведенных несущих лапах (2 и 3) пружины растяжения 
19
Фие.7
Фие.З
| Способ подъема и транспортирования захватным устройством пакетов штучных грузов прямоугольной формы и захватное устройство для его осуществления | 1978 |
|
SU870332A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
