diid8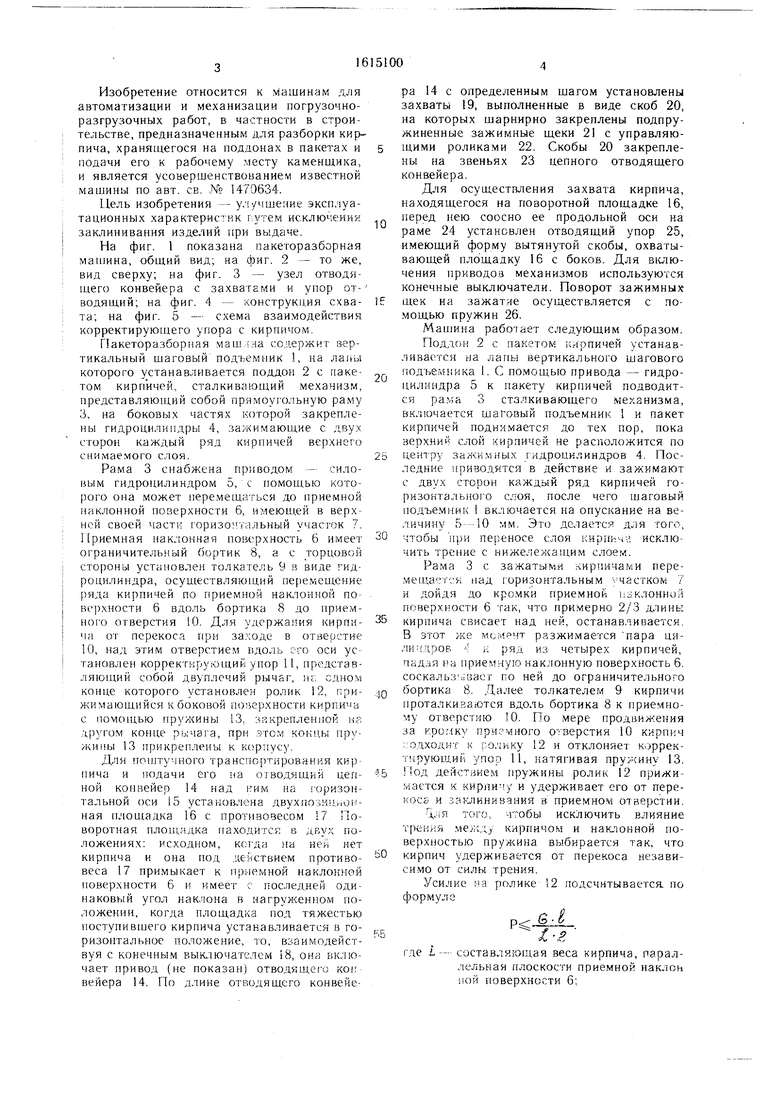
| название | год | авторы | номер документа |
|---|---|---|---|
| Пакеторазборная машина для штучных грузов | 1987 |
|
SU1470634A1 |
| Пакеторазборная машина для штучных грузов | 1989 |
|
SU1708728A2 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Пакеторазборная машина для штучных грузов | 1974 |
|
SU667469A1 |
| Установка для укладки кирпича напЕчНыЕ ВАгОНЕТКи | 1978 |
|
SU804452A1 |
| Установка разгрузки и пакетирования кирпича | 1987 |
|
SU1482803A1 |
| КОМПЛЕКС ДЛЯ СУШКИ И ОБЖИГА КИРПИЧА С ЕГО ТРАНСПОРТИРОВКОЙ В КАССЕТАХ, КАССЕТА ДЛЯ ТРАНСПОРТИРОВКИ КИРПИЧА, АВТОМАТ-САДЧИК, АВТОМАТ-УКЛАДЧИК, СУШИЛО И НАКОПИТЕЛЬ КАССЕТ | 2006 |
|
RU2333831C2 |
| Пакеторазборная машина для штучных грузов | 1983 |
|
SU1193078A1 |
| Машина для штабелевки свежеотформованных керамических и силикатных изделий, принимаемых от прессов | 1959 |
|
SU126044A1 |
| Пакеторазборная машина для штучных грузов | 1979 |
|
SU889575A1 |
Изобретение относится к машинам для автоматизации и механизации погрузочно-разгрузочных работ, в частности в строительстве, предназначенным для разборки кирпича, хранящегося на поддонах в пакетах, и подачи его к рабочему месту. Цель изобретения - улучшение эксплуатационных характеристик путем исключения заклинивания изделий при выдаче. Цель достигается тем, что в зоне поворотной площадки 16 над приемной наклонной поверхностью 6 закреплен посредством перпендикулярной этой поверхности оси выполненный в виде подпружиненного двуплечего рычага корректирующий упор 11, на одном плече которого установлен ролик 12. 1 з.п. ф-лы, 5 ил.
Фиг. 5
..
SEF I Ssz-iilai
1
, .ййЗГа,
l
l
Изобретение относится к машинам для автоматизации и механизации погрузочно- разгрузочных работ, в частности в строительстве, предназначенным для разборки кирпича, хранящегося на поддонах в пакетах и подачи его к рабочему месту каменилиха, и является усовершенствованием известной машины по авт. св. ,№ 1470634.
Цель изобретения - у.1/чшение SKcru sya- тационных характеристик г.утем исключения заклинивания изделий при выдаче.
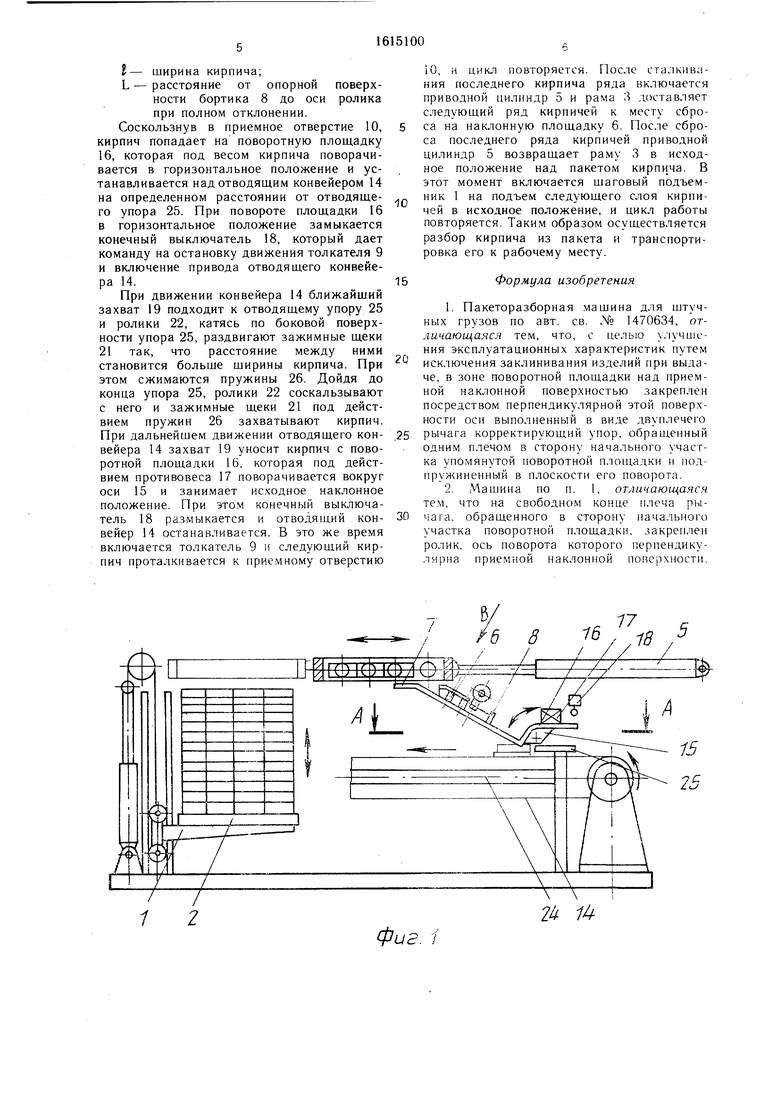
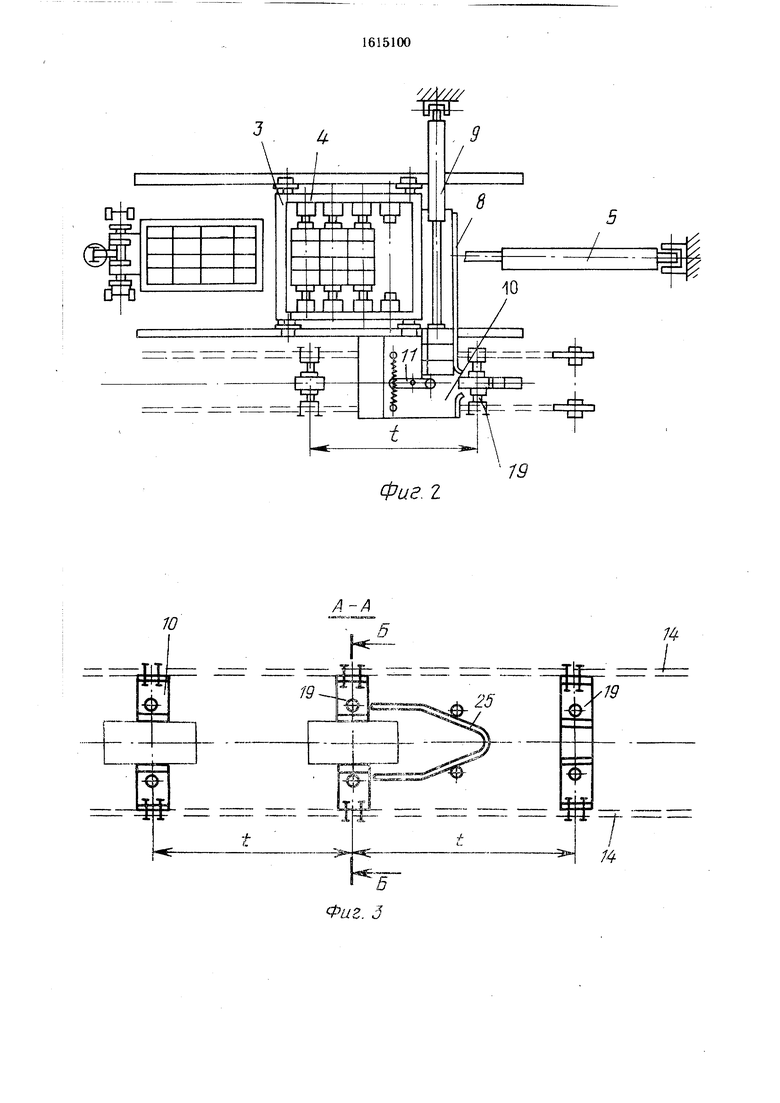
На фиг. 1 показана пакеторазборная мап1ина, обш,ий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - узел отводящего конвейера с захватами и упор отводящий; на фиг. 4 - конструкция схва- та; на фиг. 5 - схема взаимодействия корректирующего упора с кирпичом.
Пакеторазборная машлна содержит вертикальный шаговый подъе.мник , на лаиы которого устанавливается поддон 2 с пакетом кирпичей, сталкивающий механизм, представляюо;ий собой прямоугольную раму 3, на боковых частях которой закреплены гидроцилипдры 4, за;-химающие с двух сторон каждый ряд кирпичей верхнего снимаемого слоя.
Рама 3 снабжена приводом - силовым гидроцилиндром 5, с помощью которого она может перемещаться до приемной наклонной поверхности 6, имеюш.ей в верхней своей части г оризонтальный учасгок 7. Приемная наклонная поверхность 6 имеет ограничительный бортик 8, а с торцовой стороны установлен толкатель 9 в виде гидроцилиндра, осуществляющий перемеп1.ение ряда кирпичей по приемной наклонной по- В1-)хности 6 вдоль бортика 8 до приемного отверстия 10. Для удержания кирпича от перекоса при за.ходе в отверстие 10, над этим отверстием вдоль гго оси установлен корректирующий упор И, представляющий собой двуплечий рычаг, lu. одном конце которого установлен ролик 2, прижимающийся к боковой поверхности кирпича с помопхью пружины 13, закрепленной на другом конце рь:чага, при этом концы пружины 13 прикреплены к корпусу.
Для поп:тучного транспортирования кирпича и подачи его на отводящий цепной конвейер 14 над ним на горизонтальной оси 15 установлена двухпозици011- ная площадка 16 с противовесом П Поворотная плон1адка находится в двух положениях; исходном, когда на ней нет кирпича и она под действием противовеса 17 примыкает к приемной наклонной поверхности 6 и имеет с последней одинаковый угол наклона в нагруженном положении, когда площадка под тяжестью поступиBnjero кирпича устанавливается в горизонтальное положение, то, взаимодействуя с конечны.м выключателем 18, она включает привод (не показан) отводящего кои вейера 14. По длине отводящего конвейе
0
6
0
5
0
5
pa 14 с определенным шагом установлены захваты 19, выполненные в виде скоб 20, на которых щарнирно закреплены подпружиненные зажимные щеки 2 с управляющими роликами 22. Скобы 20 закреплены на звеньях 23 цепного отводящего конвейера.
Для осуществления захвата кирпича, находящегося на поворотной площадке 16, перед нею соосно ее продольной оси на раме 24 установлен отводящий упор 25, имеющий форму вытянутой скобы, охватывающей площадку 16 с боков. Для вютю- чения приводов механизмов используются конечные выключатели. Поворот зажимных щек на зажатяе осуществляется с помощью пружин 26.
Мащина работает следующим образом.
Поддон 2 с пакетом кирпичей устанавливается на лапы вертикального шагового гюдъемника I. С помощью привода - гидроцилиндра 5 к пакету кирпичей подводится pa.via 3 сталкивающего механизма, включается шаговый подъемник 1 и пакет кирпичей поднимается до тех пор, пока верхний слой кирпичей не расположится по центру зажимных гидроцилиндров 4. Последние приводятся в действие и зажимают с двух сторон каждый ряд кирпичей горизонтального слоя, после чего Н1аговый подъемник 1 включается на опускание на величину 510 мм. Это делается для того,
чтобы при переносе слоя кирпича исключить трение с нижележанхим слоем.
Рама 3 с зажатыми кирпичами пере- мещаегсн над горизонтальным -. частком 7 и дойдя до кро.мки приемной (аклонной поверхности 6 так, что примерно 2/3 длины кирпича свисает над ней, останавливается. В этот же момент разжимается пара ци- лкчдров :: и ряд из четырех кирпичей, падая на приемнузо наклонную поверхность 6. соскальз ,;вает по ней до ограничительного бортика 8. Далее толкателем 9 кирпичи проталкиваются вдоль бортика 8 к приемному отверстию 10. По мере продвижения за кромку приг-яного отверстия 10 кирпич ::одхо/ ит К pojiHRy 12 И отклоняет коррек- тнрующий упор 11, натягивая прухину 13. од действием нружнны ролик 12 прижимается к кирпичу и удерживает его от перекоса и за-гужнивания в приемном отверстии.
а,ля того, чтобы исключить влияние трения .между кирпичом и наклонной по
верхностью пружина кирпич удерживается симо от силы трения. Усилие на ролике формуле
выбирается так, что от перекоса незави52 подсчитывается по
Р
где I -
составляющая веса кирпича, параллельная плоскости приемной наклон 11ой поверхности 6;
Е- ширина кирпича;
L - расстояние от опорной поверхности бортика 8 до оси ролика при полном отклонении.
Соскользнув в приемное отверстие 10, кирпич попадает на поворотную площадку 16, которая под весом кирпича поворачивается в горизонтальное положение и устанавливается над отводящим конвейером 14 на определенном расстоянии от отводяще- го упора 25. При повороте площадки 16 в горизонтальное положение замыкается конечный выключатель 18, который дает команду на остановку движения толкателя 9 и включение привода отводящего конвейера 14.
При движении конвейера 14 ближайщий захват 19 подходит к отводящему упору 25 и ролики 22, катясь по боковой поверхности упора 25, раздвигают зажимные щеки 21 так, что расстояние между ними становится больще ширины кирпича. При этом сжимаются пружины 26. Дойдя до конца упора 25, ролики 22 соскальзывают с него и зажимные щеки 21 под действием пружин 26 захватывают кирпич. При дальнейшем движении отводящего кон- вейера 14 захват 19 уносит кирпич с поворотной площадки 16. которая под действием противовеса 17 поворачивается вокруг оси 15 и занимает исходное наклонное положение. При этом конечный выключатель 18 размыкается и отводящий кон- вейер 14 останавливается. В это же время включается толкатель 9 л следующий кирпич проталкивается к приемному отверстию
10, и цикл повторяется. После сталкивания последнего кирпича ряда включается приводной цилиндр 5 и рама 3 доставляет следующий ряд кирпичей к месту сброса на наклонную площадку 6. После сброса последнего ряда кирпичей приводной цилиндр 5 возвращает раму 3 в исходное положение над пакетом кирпи ча. В этот момент включается шаговый подъемник 1 на подъем следующего слоя кирпичей в исходное положение, и цикл работы повторяется. Таким образом осуществляется разбор кирпича из пакета и транспортировка его к рабочему месту.
Формула изобретения
А
/77г:
6 8 б , IS /
2 1
иг. 1
D-O
sasfw
40z/e. J
31:
. 9
/
.
10
Фиг. г
/4
ife:
/
22
ФигЛ
22
| Пакеторазборная машина для штучных грузов | 1987 |
|
SU1470634A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
