Известны способы индикации области нахождения текущего положения изображающей точки в фазовом пространстве по величинам и знакам координат этой точки.
Описываемый способ отличается тем, что последовательными шагами разворачивают систему координат модели, совмещая ось абсцисс с положениями всех линий переключения, и определяют момент изменения знака ординаты, изображающей точки в новой системе координат.
Это нозволяет повысить точность и надежность индикации области, к которой принадлежит текущее положение изображающей точки.
Описываемый способ предназначен для реализации управления процессом по заранее синтезированному многолистному фазовому портрету. Выявление на плоскости области, которой принадлежит точка с заданными координатами, нроизводится на модели многолистного фазового портрета. Указанную принадлежность точки определяют не по величине, а по изменению знака (фазы) координат контролируемой точки.
На чертеже приведен характерный общий случай, когда модель фазовой плоскости разбита на я листов (в частности, на VIII областей), а один лист (область III) или несколько листов разбиты на подобласти.
10
15
20
25
ио совпадает со всеми линиями переключения. Все возможиые сочетания иоложения оси и пололсеиия изображающей точки на фазовой плоскости сведены в таблицу. Из таблицы следует, что смена знаков ордииаты, изображающей точки, с плюса на мииус однозпачпо определяет ее принадлежность области, ограниченной соответствующими линиями переключения. Аналогичная картина наблюдается и при «опросе области ///, разбитой па 3 подобласти. Подобласти «опращнваются только в том случае, когда онределепо, что изображающая точка находится -в области ///.
Реализовать предложенпый способ можно, например, рещением уравнения, определяющего значение ординаты в новой системе координат:
У - ( Усозф - Ь,
где X, Y - текущее значение координаты
параметра;
У - значение ординаты параметра в повой системе координат;
Ф - угол разворота осей координат; b - значение ординаты нового начала координат.
Онисываемый способ может применяться в системах автоматического регулирования для организации устойчивого управления процессом.
Предмет изобретения
Способ анализа состояния системы автоматического регулирования с использованием модели многолистного фазового портрета с
выделепными на нем положениями линий переключения областей режимов, отличающийся тем, что, с целью повыщения точности и надежности индикации области, к которой принадлежит текущее положение изображающей
точки, последовательными щагами разворачивают систему координат модели, совмещая ось абсцисс с положениями всех линий переключения, и определяют момент изменения знака ординаты, изображающей точки в новой системе координат.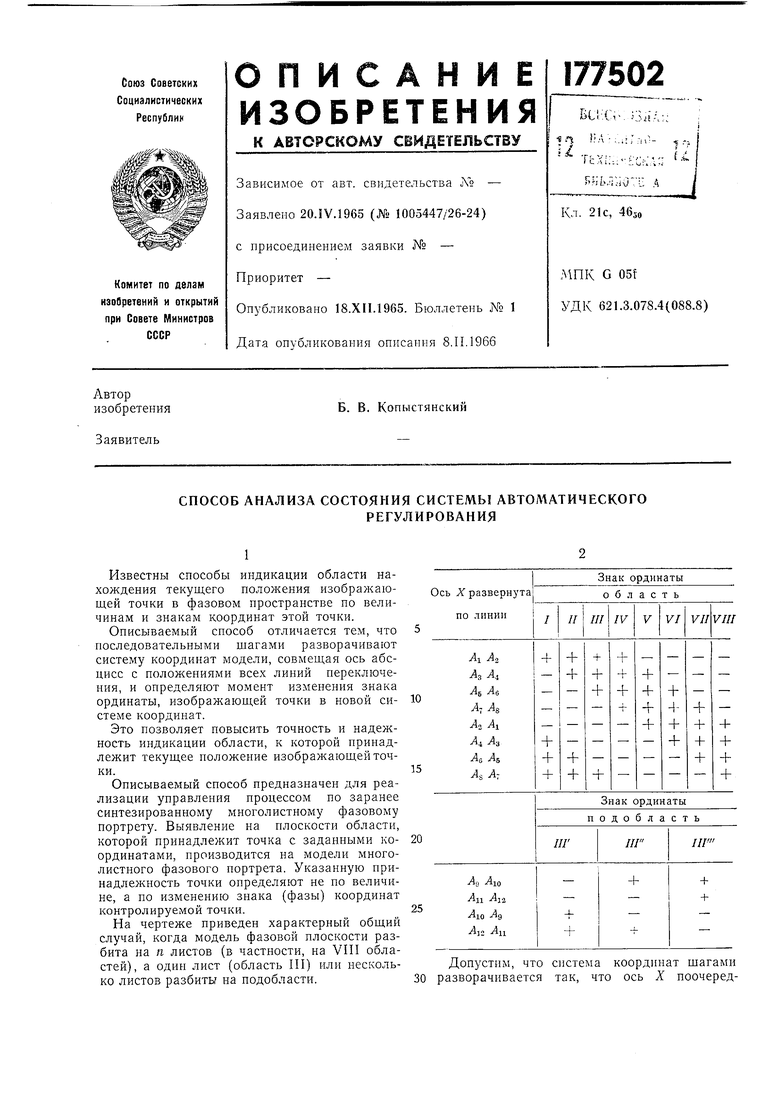

| название | год | авторы | номер документа |
|---|---|---|---|
| САМООРГАНИЗУЮЩАЯСЯ СИСТЕМА | 1966 |
|
SU177503A1 |
| Способ управления | 1975 |
|
SU805247A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU805250A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗА СОСТОЯНИЕМ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ С ПЕРЕМЕННЫМИ ПАРАМЕТРАМИ | 1966 |
|
SU223874A1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ПОДДЕРЖАНИИ ЗАДАННОЙ ОРИЕНТАЦИИ С ПОМОЩЬЮ РЕАКТИВНЫХ МАХОВИКОВ | 2004 |
|
RU2281233C2 |
| Способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата | 2016 |
|
RU2610150C1 |
| Способ релейного управления объектом с астатизмом второго порядка | 1971 |
|
SU894671A1 |
| Устройство для определения геодезических прямоугольных координат по результатам измерений фазовыми радиогеодезическими системами гиперболических координат | 1973 |
|
SU440669A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРИЧЕСКОЙ АКТИВНОСТИ СЕРДЦА | 2007 |
|
RU2360597C2 |
| СПОСОБ ИЗМЕРЕНИЯ СДВИГА ФАЗ СИГНАЛОВ РАСХОДОМЕРА КОРИОЛИСА | 2021 |
|
RU2762219C1 |
2
X А,
VIII
