(54) СПОСОБ РЕЛЕЙНОГО УПРАВЛЕНИЯ ОБЬЕКТОМ С АСТАТИЗМОМ ВТОРОГО ПОРЯДКА
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОПРОВОЖДЕНИЯ ОБЪЕКТА И СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ЛУЧА ПРИЕМНО-ПЕРЕДАЮЩЕГО АНТЕННОГО УСТРОЙСТВА СИСТЕМЫ СОПРОВОЖДЕНИЯ ОБЪЕКТА | 2011 |
|
RU2476904C1 |
| СПОСОБ ДЕМПФИРОВАНИЯ ВЫНУЖДЕННЫХ СИСТЕМ РЕГУЛИРОВАНИЯКОЛЕБАНИЙ | 1969 |
|
SU253205A1 |
| Способ управления гидрообъемным приводом движителя судовозной тележки наклонного судоподъемника и устройство для его осуществления | 1986 |
|
SU1444182A1 |
| Система управления объектом с присоединенным упругодеформируемым элементом | 1986 |
|
SU1403015A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1985 |
|
SU1381445A1 |
| Релейный регулятор | 1980 |
|
SU900258A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Способ управления | 1975 |
|
SU805247A1 |
| СПОСОБ САМОНАВЕДЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПО ИНФОРМАЦИИ О ФАКТЕ ВИЗИРОВАНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2014 |
|
RU2607758C2 |
| Следящая система | 1975 |
|
SU559219A1 |
1
Изобретение относится к автоматическому управлению и может найти применение в устройствах при управлении объектом с астатизмом второго порядка.
Известен способ релейного управления, основанньй на измерении величины выходной координаты и величины скорости изменения выходной координаты, суммировании сигналов измеренных величин и управлении объектом сигналом, пропорциональным знаку полученной суммы 1 .
Однако в случае ограниченной линей ной зоны датчиков, измерякмцих выходную координату, переходной процесс по этому способу имеет колебательный характер с большим временем его затухания.
Цель изобретения - повьпнение быстродействия.
Поставленная цель достигается .путем измерения знака сигнала выходной координаты, измерения величины сигнала, пропорционального скорости изменения выходной координаты в момент изменения знака сигнала выходной координаты, уменьшения полученного сигнала в зависимости от параметров исполнительного органа, запоминания уменьшенного значения сигнала, суммирования текущего значения сигнала, пропорционального скорости изменения выходной координаты, с запомненным сигналом и изменения знака управляющего сигнала в момент равенства нулю полученной суммы.
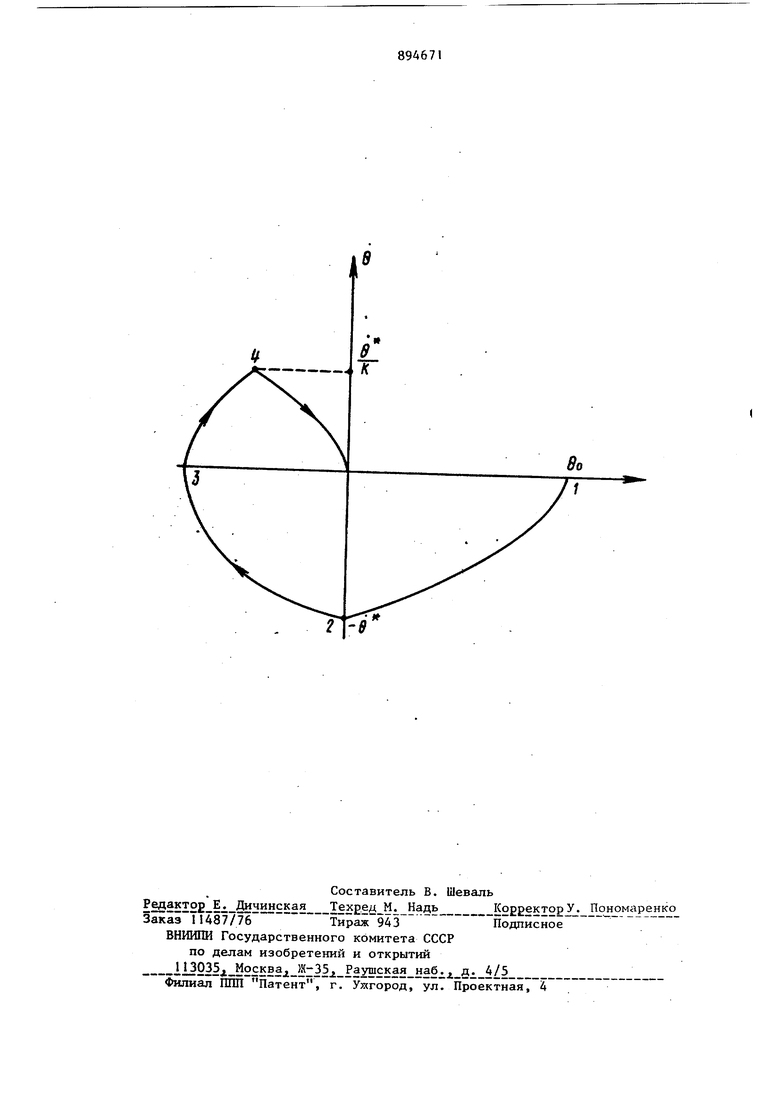
На чертеже изображен фазовый портрет системы, где измеренное значение скорости изменения выходной координаты в момент изменения ее знака; К - коэффициент, определяемый в зависимости от параметров исполнительного органа.
Как видно из чертежа, в начальный момент к объекту управления прикладывают управляющий момент, направленный на ликвидацию начального значения вы3ходной координаты б (участок 1-2 фа зовой траектории), при этом в момент обнуления выходной координаты (точка 2) скорость изменения выходкой координаты достигает значения - б () С изменением знака выходной координаты к управляющему объекту прикла дывают управляющее воздействие, направленное на уменьшение выходной ко ординаты (участок траектории 2-4). Вид фазовых траекторий зависит от параметров исполнительных органов поэтому в зависимости от этих параметров можно заранее определить то значение скорости изменения выходной координаты, при котором надо произвести последнее изменение знака управления. Учитывая вышесказанное, вводится коэффициент уменьшения запомненного, значения скорости изменения выходной координаты К, для расчета которого определяется величина ускорения . выходной координаты до последнего изменения знака управления и величина ускорения . +1 после последнего изменения знака управления. Для такого расчета также необходимо знать параметры исполнительного органа. Уравнение для определения коэффициента К имеет вид: т.е. при изменении знака управляющего- сигнала в точке 4 изображающая .4 точка попадает в начало координат фазовой плоскости. Таким образом, предлагаемый способ позволяет сократить длительность переходного процесса, т.е. повысить быстродействие, следовательно, уменьшить энергопотребление системы. Форм/ла изобретения Способ релейного управления объектом с астатизмом второго порядкга, основанный на измерении сигнала, пропорционального скорости изменения выходной кйординаты, отличающийся тем, что, с целью повьшения быстродействия, измеряют знак сигнала выходной координаты, измеряют величину сигнала, пропорционального скорости изменения выходной координаты в момент изменения ее знака, уменьшают полученный сигнал в зависимости от параметров исполнительного органа, запог.шнают уменьшенное значение сигнала, суммируют текущее значение сигнала, пропорционального скорости изменения выходной координаты, с запомненным сигналом и изменяют знак управляющего сигнала в момент равенства нулю полученной суммы. Источники информации, принятые во внимание при экспертизе 1. Проектирование следящих систем, Под. ред. Л.В. Рабиновича, М., Машиностроение, 1969, с. 383-389, рис. 6-38 (прототип).
