Изобретение относится к гидромашиностроению, в частности к одновинтовым мно- гозаходным насосам, и может быть использовано в общем машиностроении и в различных областях горного дела, например при механизированной добыче нефти и других пластовых жидкостей из скважин,
Рабочие органы одновинтовой гидромашины (ротор и статор) выполнены в виде винтового героторного механизма (ВГМ), представляющего собой кинематическую пару, находящуюся в постоянном контакте, подобно зубчатой паре с внутренним зацеплением, и образующую замкнутые полости. Ось ротора смещена относительно оси статора на величину эксцентриситета е. Число зубьев статора Zi на единицу больше числа зубьев ротора 2.2. Отношение шагов Т и t соответственно поверхностей статора и ротора прямо пропорционально отношению чисел зубьев - кинематическому отношению -I Z2:Zi. Во всех известных конструкциях одновинтовых гидравличе- скихмашин в основу образования профилей
поперечного сечения рабочих органов положены циклоидальные или близкие к ним кривые.
Исходный профиль рабочего органа является эквидистантен циклоидальной кривой, отнесенной от последней на длину радиуса эквидистанты гц. Собственно циклоидальная кривая образуется как траектория точки, связанной с производящей окружностью радиуса г и отстоящей от ее центра на расстояние I, катящейся по исходной неподвижной окружности.
Поверхности стзтора и ротора образуются винтовым движением соответствующих профилей.
Геометрия винтового героторного механизма полностью характеризуется четырьмя безразмерными параметрами: кинематическим отношением I, коэффициентом формы зуба О Гц/I, коэффициентом внецентроидности Со г/1, коэффициен- том формы винтовых поверхностей Ст t/dcp, где dcp - средний диаметр рабочего органа
со
с
XJ
XI 00
GJ О
ч
Первые три коэффициента характеризуют плоскую геометрию ВГМ, определяя профиль рабочих органов, параметр Ст характеризует пространственную геометрию пары.
Поскольку для профилирования рабочих органов используется ВГМ с коэффициентом внецентроидности Со, близким к 1 (или равным 1, в случае механизма с одно- заходным ротором), в дальнейшем можно принять, что плоская геометрия ВГМ данного 1 полностью определяется коэффициентом формы зуба Ci.
Известен многозаходный винтовой ге- роторный механизм, в котором оптималь- ное соотношение эксцентриситета механизма к радиусу зуба базируется на теоретическом и экспериментальном исследовании одновинтовых гидравлических машин с относительно большими шагами (Ст 5), характерными для ВГМ - двигателей,
В ВГМ, эксплуатирующихся в насосном режиме, параметр Ст 5 и полученные рекомендации по оптимальному значению коэффициента формы зуба Ci требуют коррекции.
Известен также одновинтовой многозаходный насос, состоящий из статора с винтовой нарезкой на внутренней поверхности и расположенного внутри него с эксцентриситетом ротора с наружной винтовой поверхностью, отношение шагов кото- рых к среднему диаметру не превышает пяти, а исходный профиль поперечного сечения которых представляет собой экви- дистанту циклоидальной или близкой к ней кривой.
Пространственная геометрия рабочих органов насоса выбирается, исходя из обес- печения минимума длины контактной линии поверхностей статора и ротора. Для достижения этой цели параметр Ст выбирается из диапазона Ст 1,5-3,5. Однако в этом изобретении не учтена взаимосвязь геометри- ческих параметров Ст и Ci, комбинация которых обуславливает оптимизацию геометрии и приводит к уменьшению контактных нагрузок.
Целью изобретения является повыше- ние надежности и долговечности за счет обеспечения минимального уровня контактных давлений в паре рабочих органов.
Для этого в рабочих органах многоза- ходной одновинтовой гидромашины, состо- ящих из статора с винтовой нарезкой на внутренней поверхности и расположенного внутри него с эксцентриситетом ротора с наружной винтовой поверхностью, отношение шагов которых к среднему диаметру не
превышает пяти, а исходный профиль поперечного сечения которых представляет собой эквидистанту циклоидальной или близкой к ней кривой, отношение радиуса Гц эквидистанты к эксцентриситету е зацепления выбирается из соотношения
Ґ-з
bU(0.9-1,1)-1.85 |1(и- с, ),
где Zi,Z2 - число зубьев соответственно статора и ротора;
Ст - коэффициент формы винтовых поверхностей ротора и статора.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается тем, что отношение радиуса эквидистанты к эксцентриситету зацепления выбирается из соотношения:
(0.9-1,1)-1,85 |±(1 + Ст4
Zt
Z2
л 3
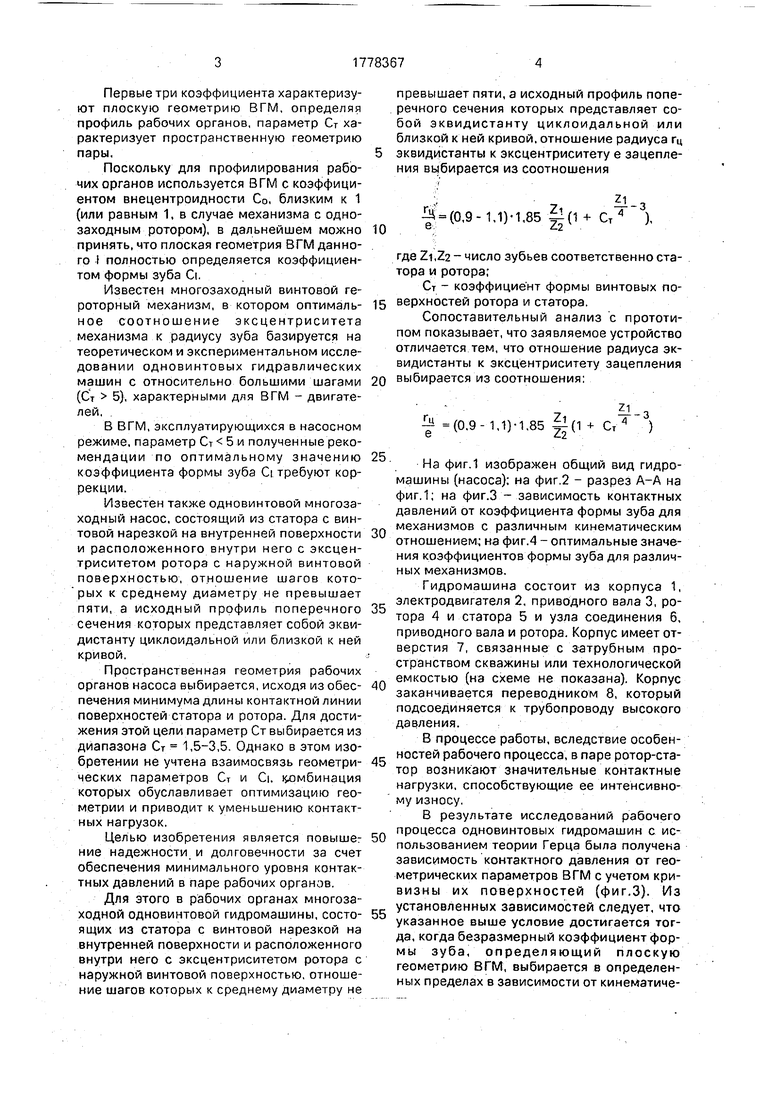
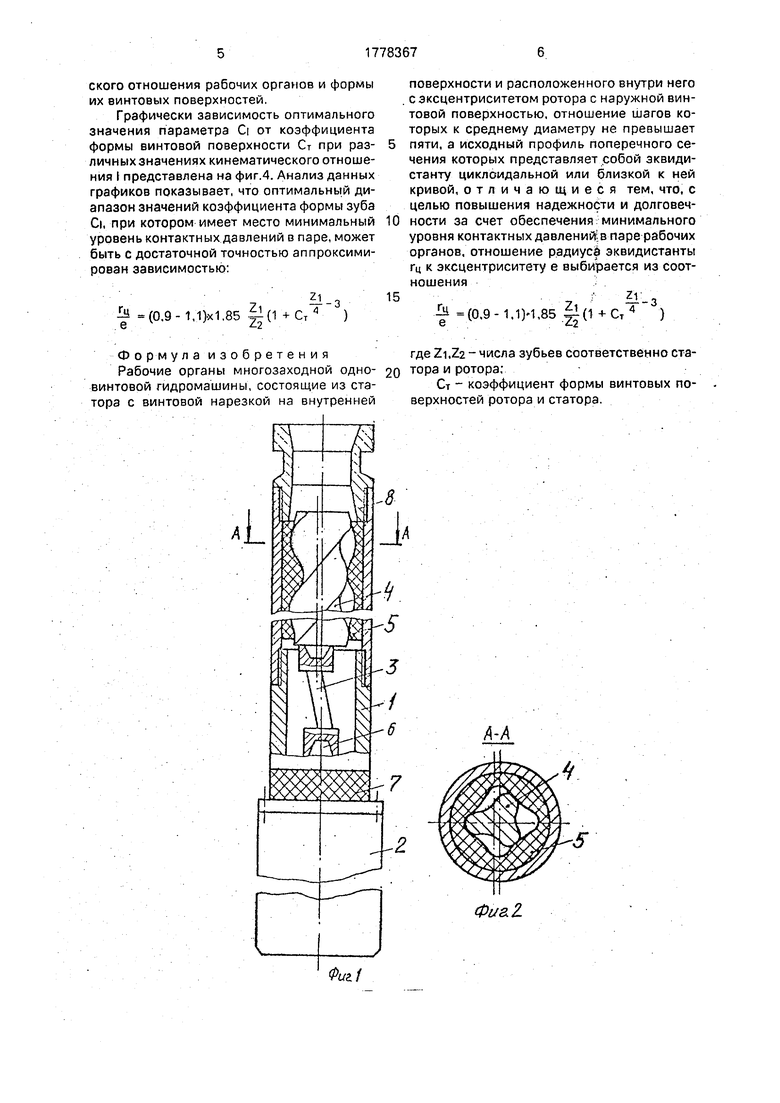
На фиг.1 изображен общий вид гидромашины (насоса); на фиг.2 - разрез А-А на фиг.1; на фиг.З - зависимость контактных давлений от коэффициента формы зуба для механизмов с различным кинематическим отношением; на фиг.4 - оптимальные значения коэффициентов формы зуба для различных механизмов.
Гидромашина состоит из корпуса 1, электродвигателя 2, приводного вала 3, ротора 4 и статора 5 и узла соединения 6, приводного вала и ротора. Корпус имеет отверстия 7, связанные с затрубным пространством скважины или технологической емкостью (на схеме не показана). Корпус заканчивается переводником 8, который подсоединяется к трубопроводу высокого давления.
В процессе работы, вследствие особенностей рабочего процесса, в паре ротор-статор возникают значительные контактные нагрузки, способствующие ее интенсивному износу.
В результате исследований рабочего процесса одновинтовых гидромашин с использованием теории Герца была получена зависимость контактного давления от геометрических параметров ВГМ с учетом кривизны их поверхностей (фиг.З). Из установленных зависимостей следует, что указанное выше условие достигается тогда, когда безразмерный коэффициент формы зуба, определяющий плоскую геометрию ВГМ, выбирается в определенных пределах в зависимости от кинематического отношения рабочих органов и формы их винтовых поверхностей.
Графически зависимость оптимального значения параметра С| от коэффициента формы винтовой поверхности Ст при различных значениях кинематического отношения I представлена на фиг.4. Анализ данных графиков показывает, что оптимальный диапазон значений коэффициента формы зуба Ci, при котором имеет место минимальный уровень контактных давлений в паре, может быть с достаточной точностью аппроксимирован зависимостью:
0
поверхности и расположенного внутри него с эксцентриситетом ротора с наружной винтовой поверхностью, отношение шагов которых к среднему диаметру не превышает пяти, а исходный профиль поперечного сечения которых представляет собой эквиди- станту циклоидальной или близкой к ней кривой, отличающиеся тем, что, с целью повышения надежности и долговечности за счет обеспечения минимального уровня контактных давлений в паре рабочих органов, отношение радиуса эквидистанты Гц к эксцентриситету е выбирается из соотношения
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИМИЗАЦИИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПРОФИЛЯ РАБОЧИХ ОРГАНОВ ОДНОВИНТОВОЙ ГИДРОМАШИНЫ | 1998 |
|
RU2150566C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ | 2000 |
|
RU2162926C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ | 2002 |
|
RU2250340C2 |
| ВИНТОВОЙ ЗАБОЙНЫЙ ДВИГАТЕЛЬ | 2012 |
|
RU2524238C2 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2002 |
|
RU2205998C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2002 |
|
RU2202694C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ЗАБОЙНОЙ ГИДРОМАШИНЫ (ВАРИАНТЫ) | 2000 |
|
RU2166603C1 |
| Одновинтовой многозаходный насос | 1984 |
|
SU1286814A1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2003 |
|
RU2228444C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОГО ЗАБОЙНОГО ДВИГАТЕЛЯ | 2007 |
|
RU2360129C2 |
Сущность изобретения: внутри статора с винтовой нарезкой на внутренней поверхности расположен с эксцентриситетом ротор с наружной винтовой поверхностью. Отношение шагов нарезок к среднему диаметру не превышает пяти. Исходный профиль поперечного сечения нарезок представляет собой эквидистанту циклоидальной или близкой к ней кривой. Отношение радиуса эквиди- станты к эксцентриситету выбирается из заданного соотношения. 4 ил.
Zi
21
-3
(0.9- 1,.85 J41 +СТЧ )
Формула изобретения Рабочие органы многозаходной одновинтовой гидромашины, состоящие из статора с винтовой нарезкой на внутренней
Фаг./
15
Ји е
7 °(0.9-1.1) 1,85 |1(1 + Ст4 )
где Zi.Za - числа зубьев соответственно ста- 20 тора и ротора;
Ст - коэффициент формы винтовых поверхностей ротора и статора.
Фиг.1
3 f 5 6
Риг.4
Составитель Д. Балденко Техред М.Моргентал
8
Ю
Корректор Н. Гунько
| Авторское свидетельство СССР №436944, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Одновинтовой многозаходный насос | 1984 |
|
SU1286814A1 |
| кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
