Фиг. /
фициентом усиления, обеспечивающим поддержание в течение переходного процесса неизменного, максимально-допустимого значения давления, а также исключающим влияние на механическую характеристику в режимах разгона и торможе- ния значения коэффициента отсечки контура отрицательной обратной связи по давлению, автоматическую коррекцию коэффициента усиления цепи обратной связи по частоте вращения гидромотора 11, обеспечивающую поддержание оптимального коэффициента усиления этой связи при возможных изменениях в процессе эксплуатации коэффициентов усиления отдельных элементов системы, а также отключение обратной связи по частоте вращения в установившемся режиме работы. 4 ил.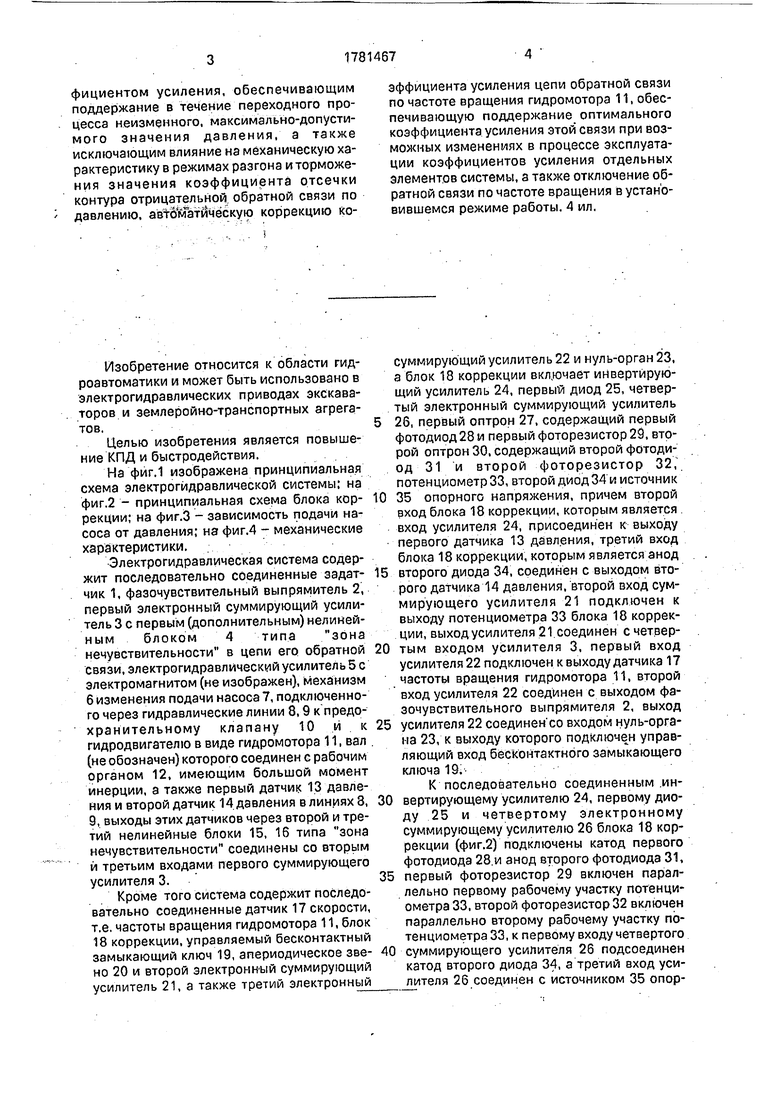
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая система | 1989 |
|
SU1714219A1 |
| Электрогидравлическая система | 1989 |
|
SU1828956A1 |
| Устройство для управления электродвигателем поворота экскаватора | 1985 |
|
SU1309233A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВОЧНОГО ВОЗДУХА ДИЗЕЛЬ-ГЕНЕРАТОРА В ДИНАМИЧЕСКИХ РЕЖИМАХ | 2015 |
|
RU2637793C2 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ УПРАВЛЯЕМОГОРЕАКТОРА | 1969 |
|
SU252735A1 |
| Устройство для возбуждения главного генератора тепловоза | 1981 |
|
SU965821A1 |
Изобретение относится к области гидроавтоматики и может быть использовано в электрогидравлических приводах экскаваторов и землеройно-транспортных машин. Целью изобретения является повышение КПД и быстродействия, Задатчиком 1 формируется переменное напряжение, на выходе выпрямителя постоянное напряжение, пропорциональное заданной подаче насоса 7 и скорости гидромотора 11. Механизм 6 отрабатывает параметр регулирования. При этом осуществляется измерение сигнала, пропорционального текущей частоте вращения гидромотора 11, введение на этапе переходного процесса разгона (либо торможения) рабочего органа 12 с большим моментом инерции положительной обратной связи по частоте вращения гидромотора 11 с оптимальным, определяемым по полученным в данном решении зависимости, коэф
Изобретение относится к области гидроавтоматики и может быть использовано в электрогидравлических приводах экскаваторов и землеройно-транспортных агрегатов.
Целью изобретения является повышение КПД и быстродействия.
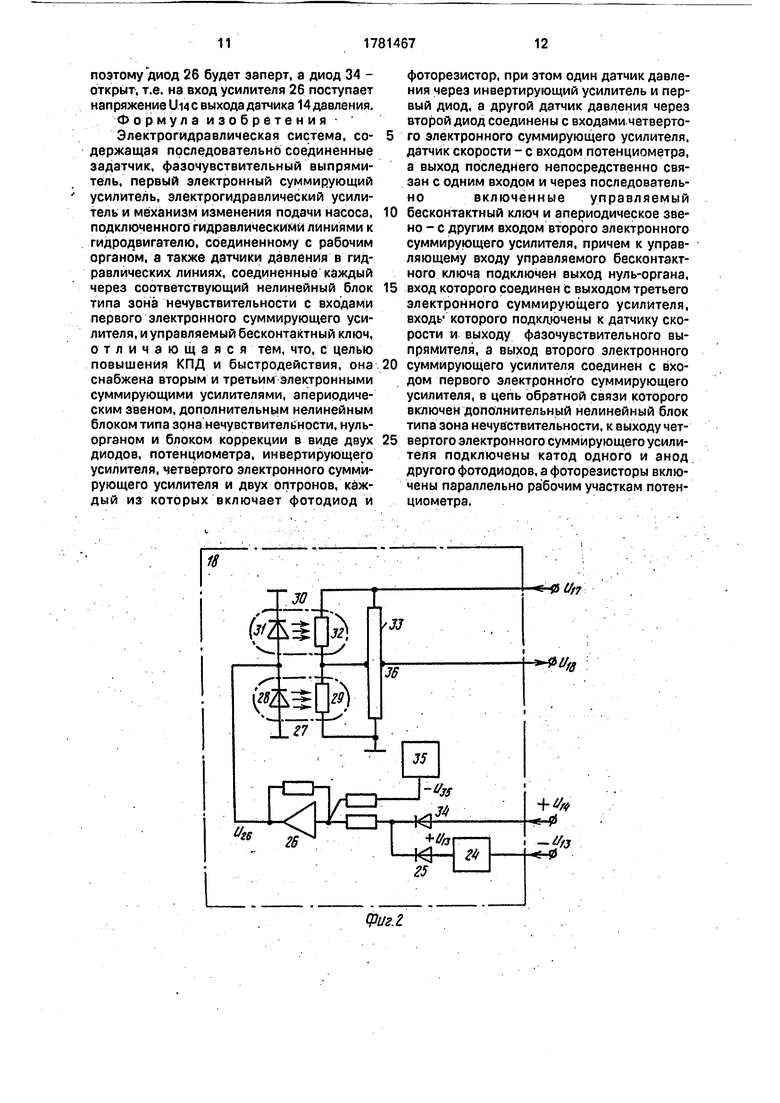
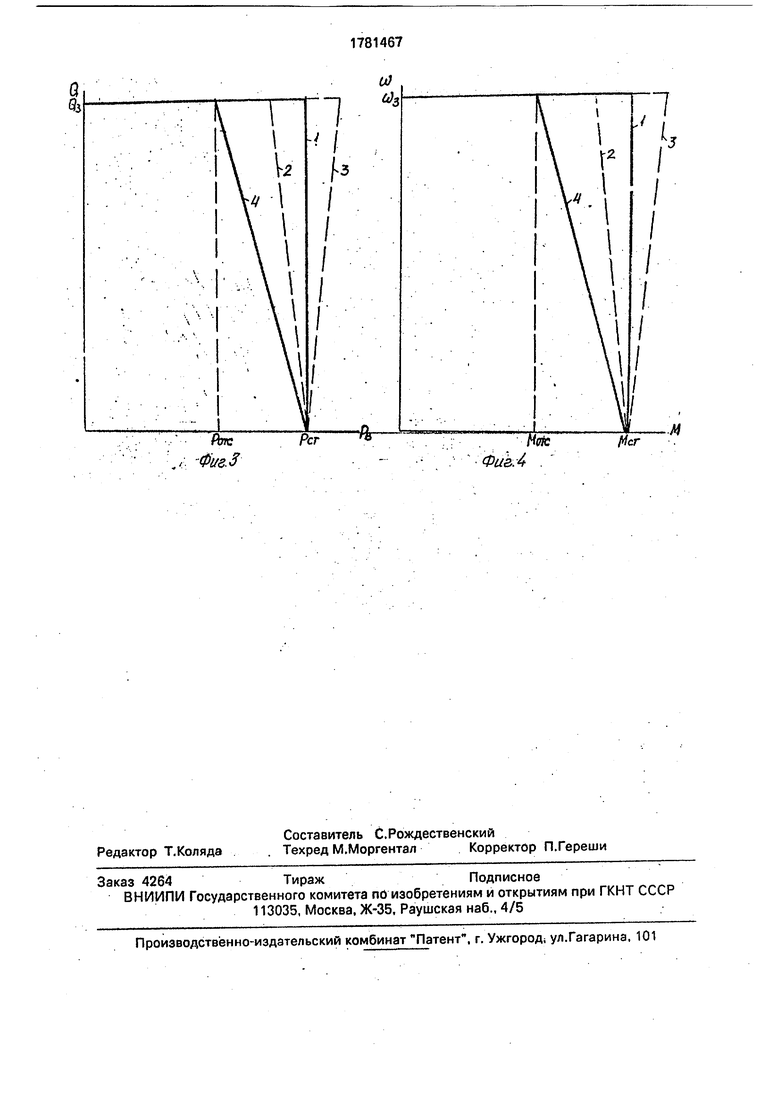
На фиг.1 изображена принципиальная схема электрогидравлической системы; на фиг.2 - принципиальная схема блока коррекции; на фиг.З - зависимость подачи насоса от давления; на фиг.4 - механические характеристики.
Электрогидравлическая система содержит последовательно соединенные задат- чик 1, фазочувствительный выпрямитель 2, первый электронный суммирующий усилитель 3 с первым (дополнительным) нелиней- ным блоком 4 типа зона нечувствительности в цепи его обратной связи, электрогидравлический усилитель 5 с электромагнитом (не изображен), механизм 6изменения подачи насоса, подключенного через гидравлические линии 8,9 к предо- хранительному клапану 10 и к гидродвигателю в виде гидромотора 11, вал (не обозначен) которого соединен с рабочим органом 12, имеющим большой момент инерции, а также первый датчик 13 давления и второй датчик 14 давления в линиях 8, 9, выходы этих датчиков через второй и третий нелинейные блоки 15, 16 типа зона нечувствительности соединены со вторым и третьим входами первого суммирующего усилителя 3.
Кроме того система содержит последовательно соединенные датчик 17 скорости, т.е. частоты вращения гидромотора 11, блок 18 коррекции, управляемый бесконтактный замыкающий ключ 19, апериодическое звено 20 и второй электроиН Ый суммирующий усилитель 21, а также третий электронный
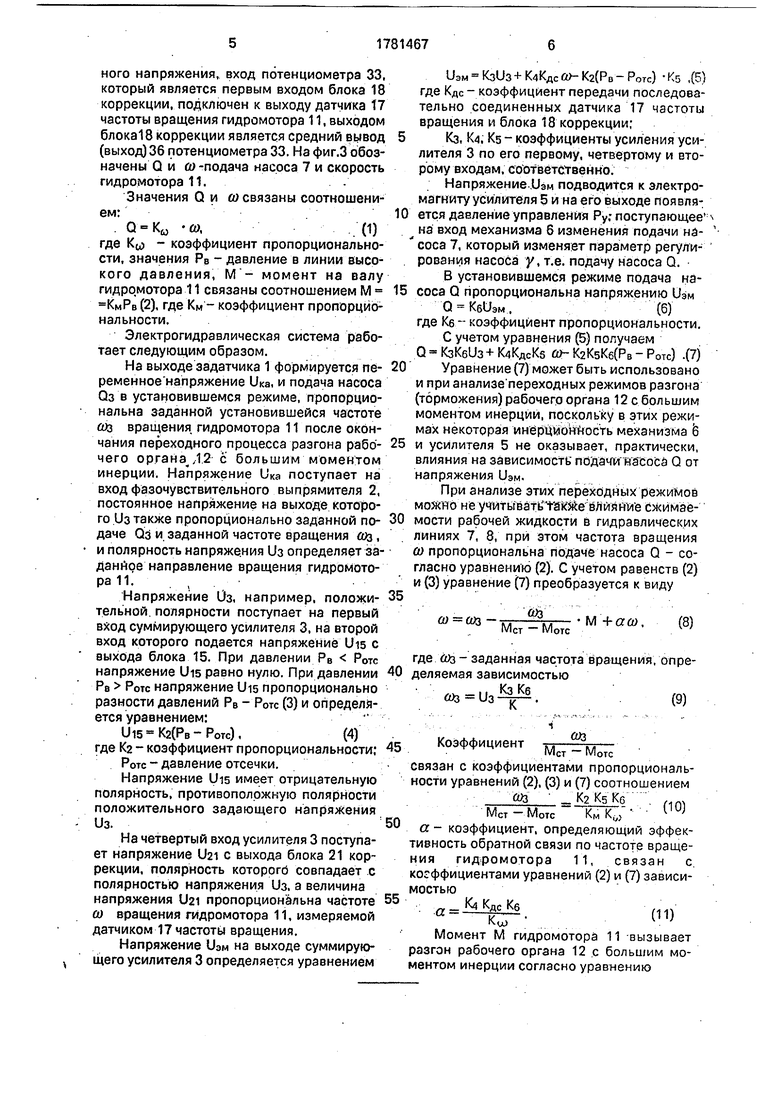
суммирующий усилитель 22 и нуль-орган 23, а блок 18 коррекции включает инвертирующий усилитель 24, первый диод 25, четвертый электронный суммирующий усилитель
26, первый оптрон 27, содержащий первый фотодиод 28 и первый фоторезистор 29, второй оптрон 30, содержащий второй фотодиод 31 и второй фоторезистор 32, потенциометр 33, второй диод 34 и источник
35 опорного напряжения, причем второй вход блока 18 коррекции, которым является вход усилителя 24, присоединен к выходу первого датчика 13 давления, третий вход блока 18 коррекции, которым является анод
второго диода 34, соединен с выходом второго датчика 14 давления, второй вход суммирующего усилителя 21 подключен к выходу потенциометра 33 блока 18 коррекции, выход усилителя 21 соединен счетвертым входом усилителя 3, первый вход усилителя 22 подключен к выходу датчика 17 частоты вращения гидромотора 11, второй вход усилителя 22 соединен с выходом фа- зочувствительного выпрямителя 2, выход
усилителя 22 соединен со входом нуль-органа 23, к выходу которого подключен управляющий вход бесконтактного замыкающего ключа 19.
К последовательно соединенным инвертирующему усилителю 24, первому диоду 25 и четвертому электронному суммирующему усилителю 26 блока 18 коррекции (фиг.2) подключены катод первого фотодиода 28 и анод второго фотодиода 31,
первый фоторезистор 29 включен параллельно первому рабочему участку потенциометра 33, второй фоторезистор 32 включен параллельно второму рабочему участку потенциометра 33, к первому входу четвертого
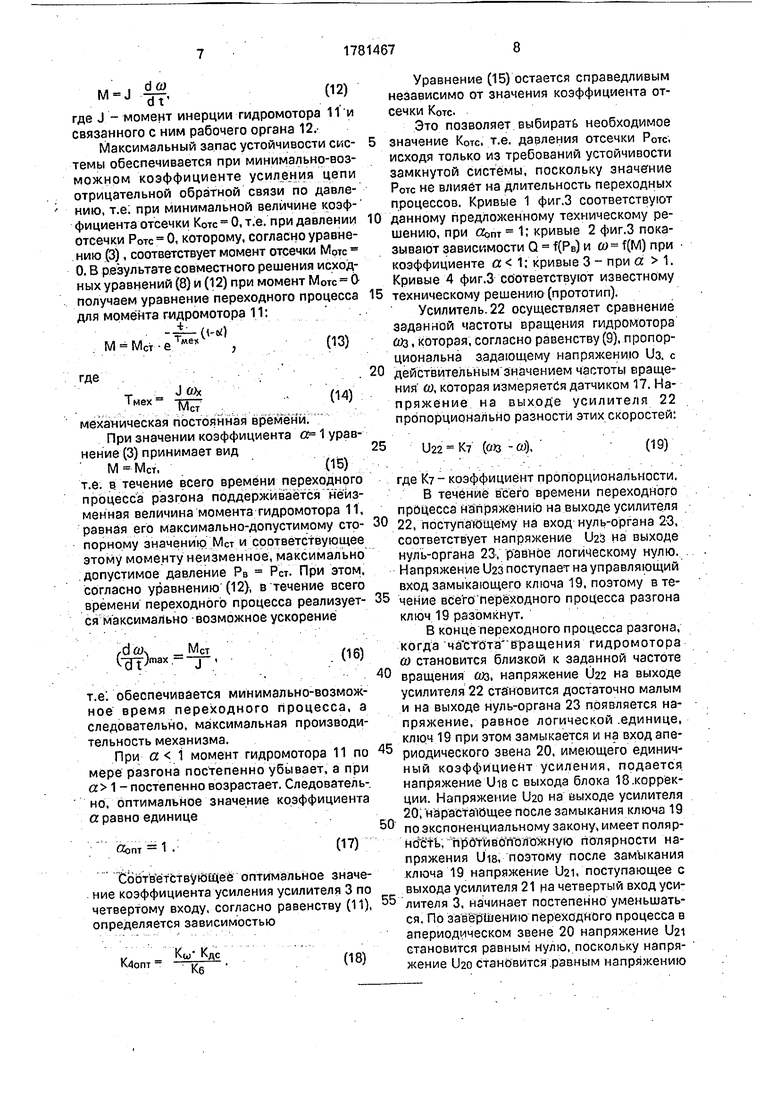
суммирующего усилителя 26 подсоединен катод второго диода 34, а третий вход усилителя 26 соединен с источником 35 опорного напряжения, вход потенциометра 33, который является первым входом блока 18 коррекции, подключен к выходу датчика 17 частоты вращения гидромотора 11, выходом блока18 коррекции является средний вывод (выход) 36 потенциометра 33. На фиг.З обозначены Q и со -подача насоса 7 и скорость гидромотора 11.
Значения Q и о) связаны соотношением:
а Кц -а),(1)
где KIO - коэффициент пропорциональности, значения Рв - давление в линии высокого давления, М - момент на валу гидромотора 11 связаны соотношением М КМРВ (2), где Км - коэффициент пропорциональности.
Электрогидравлическая система работает следующим образом.
На выходе задатчика 1 формируется переменное напряжение Ука, и подача насоса Оз в установившемся режиме, пропорциональна заданной установившейся частоте шз вращения гидромотора 11 после окончания переходного процесса разгона рабочего opraHa 12 с большим моментом инерции. Напряжение UKa поступает на вход фазочувствительного выпрямителя 2, постоянное напряжение на выходе которого Ua также пропорционально заданной подаче Оз и заданной частоте вращения од. и полярность напряжения Уз определяет заданное направление вращения гидромотора 11.
Напряжение Us, например, положительной полярности поступает на первый вход суммирующего усилителя 3, на второй вход которого подается напряжение Uis с выхода блока 15. При давлении Рв Роте напряжение У-ш равно нулю. При давлении Рв Роте напряжение Uis пропорционально разности давлений Рв - Роте (3) и определяется уравнением:
(РВ-Ротс),(4)
где К2 - коэффициент пропорциональности;
Роте - давление отсечки.
Напряжение Uis имеет отрицательную полярность, противоположную полярности положительного задающего напряжения Уз.
На четвертый вход усилителя 3 поступает напряжение U21 с выхода блока 21 коррекции, полярность которого совпадает с полярностью напряжения Us, а величина напряжения 1)21 пропорциональна частоте а) вращения гидромотора 11, измеряемой датчиком 17 частоты вращения.
Напряжение Уэм на выходе суммирующего усилителя 3 определяется уравнением
Уэм Кзиз+К4КдсСО-К2(Рв-РотС) -К5 ,(5) где КдС - коэффициент передачи последовательно соединенных датчика 17 частоты вращения и блока 18 коррекции; Кз, К4, Ks - коэффициенты усиления усилителя 3 по его первому, четвертому и второму входам, соответственно.
Напряжение 11эм подводится к электромагниту усилителя 5 и на его выходе появля- ется давление управления Ру; поступающее « на вход механизма б изменения подачи на- coca 7, который изменяет параметр регулирования насоса у, т.е. подачу насоса Q.
В установившемся режиме подача на- coca Q пропорциональна напряжению Уэм
Q КеУэм.(6)
где Кб - коэффициент пропорциональности. С учетом уравнения (5) получаем
0 КзКбУз+К4КдсК5 У-К2К5Кб(Рв-Ротс) .()
Уравнение (7) может быть использовано и при анализе переходных режимов разгона (торможения) рабочего органа 12 с большим моментом инерции, поскольку в этих режимах некоторая инерционность механизма (3
и усилителя 5 не оказывает, практически, влияния на зависимость подач и насоса Q от напряжения УЭм.
При анализе этих переходных режимов можно не учитывать Тйк же влияние сжимаемости рабочей жидкости в гидравлических линиях 7, 8, при этом частота вращения (г) пропорциональна подаче насоса Q - согласно уравнению (2). С учетом равенств (2) и (3) уравнение (7) преобразуется к виду
0)3 -М+асо, (8)
О)0)3 -
Мет - Моте
где ыз - заданная частота вращения, опре- 40 деляемая зависимостью
,. ,, КзКе о)з Уз к
О)
5
0
5
Коэффициент
соз
Мет - Моте
связан с коэффициентами пропорциональности уравнений (2), (3) и (7) соотношением (Оз К2 К5 К6 п т
Мет-Моте КМК„;- UUJ
а- коэффициент, определяющий эффективность обратной связи по частоте вращения гидромотора 11, связан с косффициентами уравнений (2) и (7) зависимостью
.(11)
Момент М гидромотора 11 вызывает разгон рабочего органа 12 с большим моментом инерции согласно уравнению
M J
du) dt
(12)
где J - момент инерции гидромотора 11 и связанного с ним рабочего органа 12.
Максимальный запас устойчивости системы обеспечивается при минимально-возможном коэффициенте усиления цепи отрицательной обратной связи по давлению, т.е. при минимальной величине коэф- фициента отсечки Коте 0, т.е. при давлении отсечки Роте О, которому, согласно уравнению (3), соответствует момент отсечки Мотс 0. В результате совместного решения исходных уравнений (8) и (12) при момент М0тс О получаем уравнение переходного процесса для момента гидромотора 11:
Ј-(М
М Мет е ме ,
(13)
где
Тмех
(14)
Idh
ТЯс7 механическая постоянная времени.
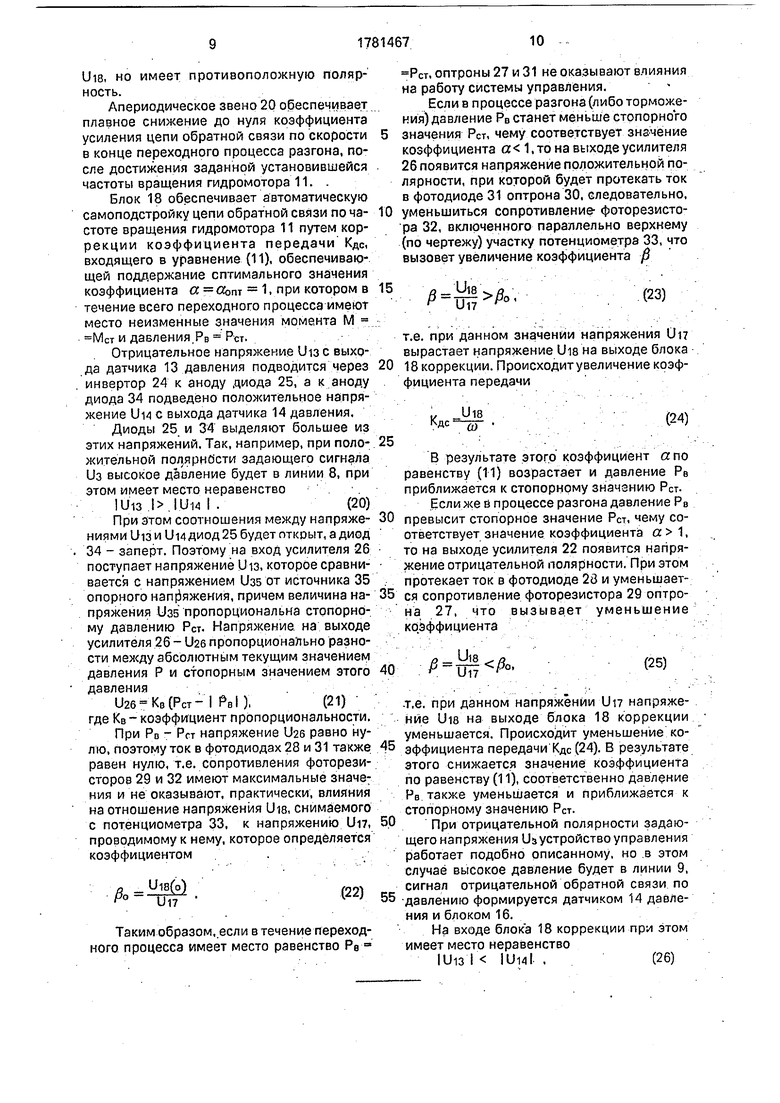
При значении коэффициента о 1 уравнение (3) принимает вид
М Мет,(15)
т.е. в течение всего времени переходного процесса разгона поддерживается неизменная величина момента гидромотора 11, равная его максимально-допустимому стопорному значению Мет и соответствующее этому моменту неизменное, максимально допустимое давление Рв Рст. При этом, согласно уравнению (12), в течение всего времени переходного процесса реализуется максимально -возможное ускорение
Мс
,Q UK Мет (-gjjmaxj ,
.(16)
т.е . обеспечивается минимально-возможное время переходного процесса, а следовательно, максимальная производительность механизма.
При а 1 момент гидромотора 11 по мере разгона постепенно убывает, а при а 1 - постепенно возрастает. Следовательно, оптимальное значение коэффициента а равно единице
«опт 1 (17)
Соответствующее оптимальное значение коэффициента усиления усилителя 3 по четвертому входу, согласно равенству (11), определяется зависимостью
К4опт
(18)
Уравнение (15) остается справедливым независимо от значения коэффициента отсечки КотеЭто позволяет выбирать необходимое
значение Коте. т.е. давления отсечки Роте, исходя только из требований устойчивости замкнутой системы, поскольку значение Роте не влияет на длительность переходных процессов. Кривые 1 фиг.З соответствуют
данному предложенному техническому решению, при Оопт 1; кривые 2 фиг.З показывают зависимости Q f(PB) и О)- f(M) при коэффициенте а 1; кривые 3 - при а 1. Кривые 4 фиг.З соответствуют известному
техническому решению (прототип).
Усилитель. 22 осуществляет сравнение заданной частоты вращения гидромотора Мз, которая, согласно равенству (9), пропорциональна задающему напряжению Уз. с
действительным значением частоты вращения со, которая измеряется датчиком 17. Напряжение на выходе усилителя 22 пропорционально разности этих скоростей:
25
U22 Ку (й)3 - О)),
(19)
где коэффициент пропорциональности. В течение всего времени переходного процесса напряжению на выходе усилителя 22, поступающему на вход нуль-органа 23, соответствует напряжение U23 на выходе нуль-органа 23, равное логическому нулю. Напряжение U23 поступает на управляющий вход замыкающего ключа 19, поэтому в течение всего переходного процесса разгона
ключ 19 разомкнут.
В конце переходного процесса разгона, когда ча стота в ращения гидромотора ш становится близкой к заданной частоте
вращения шз, напряжение U22 на выходе усилителя 22 становится достаточно малым и на выходе нуль-органа 23 появляется напряжение, равное логической .единице, ключ 19 при этом замыкается и на вход апериодического звена 20, имеющего единичный коэффициент усиления, подается напряжение Uie с выхода блока 18.коррекции. Напряжение 1)20 на ыыходе усилителя 20, нарастающее после замыкания ключа 19
по экспоненциальному закону, имеет поляр- нотЬтьгпрбтиво положную полярности напряжения Die, поэтому после замыкания ключа 19 напряжение U21, поступающее с выхода усилителя 21 на четвертый вход усилителя 3, начинает постепенно уменьшаться. По завершению переходного процесса в апериодическом звене 20 напряжение U21 становится равным нулю, поскольку напряжение 1)20 становится равным напряжению
DIB, но имеет противоположную полярность.
Апериодическое звено 20 обеспечивает плавное снижение до нуля коэффициента усиления цепи обратной связи по скорости в конце переходного процесса разгона, после достижения заданной установившейся частоты вращения гидромотора 11. .
Блок 18 обеспечивает автоматическую самоподстройку цепи обратной связи по частоте вращения гидромотора 11 путем коррекции коэффициента передачи Кдс, входящего в уравнение (11), обеспечивающей поддержание оптимального значения коэффициента а оЬпт 1, при котором в течение всего переходного процесса имеют место неизменные значения момента М МСт и давления Рв Рст.
Отрицательное напряжение Ui3 с выхода датчика 13 давления подводится через инвертор 24 к аноду диода 25, а к аноду диода 34 подведено положительное напряжение Ui4 с выхода датчика 14 давления.
Диоды 25 и 34 выделяют большее из этих напряжений. Так, например, при положительной полярности задающего сигнала высокое давление будет в линии 8, при этом имеет место неравенство
IU13 l IUi4 I .(20)
При этом соотношения между напряжениями Ui3 и Ui4 диод 25 будет пткоыт, а диод 34 - заперт. Поэтому на вход усилителя 26 поступает напряжение Uis, которое сравнивается с напряжением Кз5 от источника 35 опорного напряжения, причем величина напряжения Кзв пропорциональна стопорному давлению РСт. Напряжение на выходе усилителя 26 - U26 пропорционально разности между абсолютным текущим значением давления Р и стопорным значением этого давления
и2б Кв(Рст-1 РВ1),(21)
где Кв - коэффициент пропорциональности.
При Р0 - Ргт напряжение U26 равно нулю, поэтому ток в фотодиодах 28 и 31 также равен нулю, т.е. сопротивления фоторезисторов 29 и 32 имеют максимальные значения и не оказывают, практически, влияния на отношение напряжения Die, снимаемого с потенциометра 33, к напряжению Ui7, проводимому к нему, которое определяется коэффициентом
я -Ms)
U17
(22)
Таким образом, если в течение переходного процесса имеет место равенство Ре
Рст. оптроны 27 и 31 не оказывают влияния на работу системы управления.
Если в процессе разгона (либо торможения) давление Рв станет меньше стопорного
значения РСт, чему соответствует значение коэффициента а 1,тона выходе усилителя 26 появится напряжение положительной полярности, при которой будет протекать ток в фотодиоде 31 оптрона 30. следовательно,
уменьшиться сопротивление- фоторезистора 32, включенного параллельно верхнему (по чертежу) участку потенциометра 33, что вызовет увеличение коэффициента ft
15 о Ui8 .л ,,
(23)
т.е. при данном значении напряжения UIT вырастает напряжение Uis на выходе блока 20 18 коррекции. Происходит увеличение коэффициента передачи
(24)
В результате этого коэффициент а по равенству (11) возрастает и давление Рв приближается к стопорному значению Рст.
Если же в процессе разгона давление Рв превысит стопорное значение РСт, чему соответствует значение коэффициента а 1, то на выходе усилителя 22 появится напряжение отрицательной полярности. При этом протекает ток в фотодиоде 28 и уменьшается сопротивление фоторезистора 29 оптро- на 27, что вызывает уменьшение коэффициента
40
.
U17
(25)
т.е. при данном напряжении Ui напряжение LJ18 на выходе блока 18 коррекции уменьшается. Происходит уменьшение козффициента передачи Кдс (24). В результате этого снижается значение коэффициента по равенству (11), соответственно давление Рв также уменьшается и приближается к стопорному значению Рст.
при отрицательной полярности задающего напряжения устройствоуправления работает подобно описанному, но в этом случае высокое давление будет в линии 9, сигнал отрицательной обратной связи по
давлению формируется датчиком 14 давления и блоком 16.
На входе блока 18 коррекции при этом имеет место неравенство
IU13 I IU14I .(26)
поэтому диод 26 будет заперт, а диод 34 - открыт, т.е. на вход усилителя 26 поступает напряжение UM с выхода датчика 14 давления. Формула изобретения- Электрогидравлическая система, содержащая последовательно соединенные задатчик, фазочувствительный выпрямитель, первый электронный суммирующий усилитель, электрогидравлический усилитель и механизм изменения подачи насоса, подключенного гидравлическими линиями к гидродвигателю, соединенному с рабочим органом, а также датчики давления в гидравлических линиях, соединенные каждый через соответствующий нелинейный блок типа зона нечувствительности с входами первого электронного суммирующего усилителя, и управляемый бесконтактный ключ, отличающаяся тем, что, с целью повышения КПД и быстродействия, она снабжена вторым и третьим электронными суммирующими усилителями, апериодическим звеном, дополнительным нелинейным блоком типа зона нечувствитель ности, нуль- органом и блоком коррекции в виде двух диодов, потенциометра, инвертирующего усилителя, четвертого электронного суммирующего усилителя и двух оптронов, каждый из которых включает фотодиод и
фоторезистор, при этом один датчик давления через инвертирующий усилитель и первый диод, а другой датчик давления через второй диод соединены с входами четвертого электронного суммирующего усилителя, датчик скорости - с входом потенциометра, а выход последнего непосредственно связан с одним входом и через последовательновключенные управляемый
бесконтактный ключ и апериодическое звено - с другим входом второго электронного суммирующего усилителя, причем к управляющему входу управляемого бесконтактного ключа подключен выход нуль-органа,
вход которого соединен с выходом третьего электронного суммирующего усилителя, входы которого подключены к датчику скорости и выходу фазочувствительного выпрямителя, а выход второго электронного
суммирующего усилителя соединен с входом первого электронно го суммирующего усилителя, в цепь обратной связи которого включен дополнительный нелинейный блок типа зона нечувствительности, к выходу четвертого электронного суммирующего усилителя подключены катод одного и анод другого фотодиодов, а фоторезисторы включены параллельно рабочим участкам потенциометра.
«-0#7
%
Йис Фие.3
Per
Фиг. 4
| Авторское свидетельство СССР N21714219, кл | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
