Я,.г 1
гидромотора 10, при котором обеспечивается регулирование частоты вращения гидромотора 10 путем изменения подачи насоса 6 при неизменном, номинальном рабочем объеме гидромотора 10, в области частот вращения гидромотора 10 меньших номинальной ( ш гм о) ном), а также регулирование частоты вращения гидромотора 10 путем изменения его рабочего объема при неизменной, номинальной подаче насоса 6,
в области частот вращения гидромотора 10, выше номинальной ( соГм WHOM), а также поддержание на обоих этих этапах регулирования заданного давления в напорной линии 7 (8) путем воздействия с помощью отрицательной нелинейной обратной связи по давлению на подачу насоса 6 (в области (О гм О) ном), либо на рабочий объем гидромотора 10 (в области ШГм WHOM). Зил.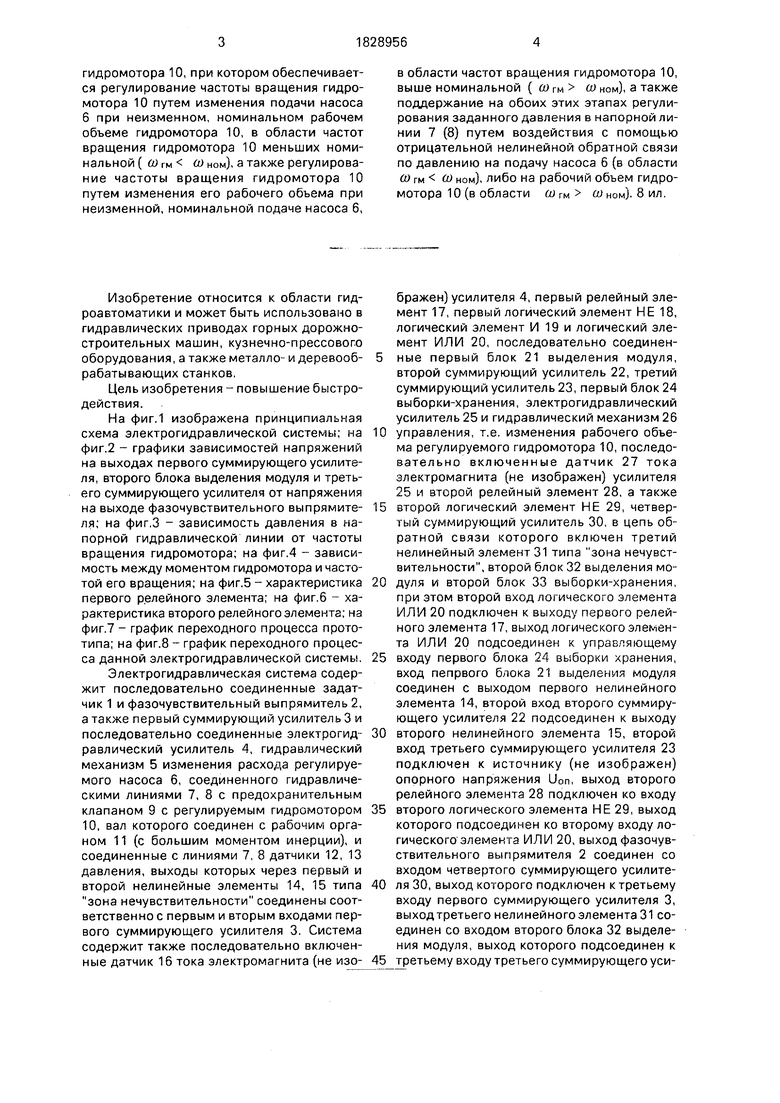
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая система | 1989 |
|
SU1781467A1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1530823A1 |
| Электрогидравлический следящий привод | 1986 |
|
SU1399521A2 |
| Электрогидравлическая система | 1989 |
|
SU1714219A1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2010 |
|
RU2425257C1 |
| Автоматизированный стенд для испытания передач | 1984 |
|
SU1182304A1 |
| Адаптивный электрогидравлический привод экскаватора | 1989 |
|
SU1681036A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Электрогидравлический следящий привод | 1988 |
|
SU1645659A1 |
| РЕГУЛЯТОР СКОРОСТИ ТРАНСПОРТНОЙ МАШИНЫ | 1991 |
|
RU2027615C1 |
Изобретение относится к области гидроавтоматики и может быть использовано в гидравлических приводах горных, дорожностроительных машин, кузнечно-прессового оборудования, а также металле- и деревообрабатывающих станков. Целью изобретения является повышение быстродействия. В соответствии с сигналом задатчика осуществляется управление с помощью электрогидравлических усилителей 4, 25, либо подачей насоса 6, либо рабочим объемом
Изобретение относится к области гидроавтоматики и может быть использовано в гидравлических приводах горных дорожностроительных машин, кузнечно-прессового оборудования, а также металле- и деревообрабатывающих станков.
Цель изобретения - повышение быстродействия.
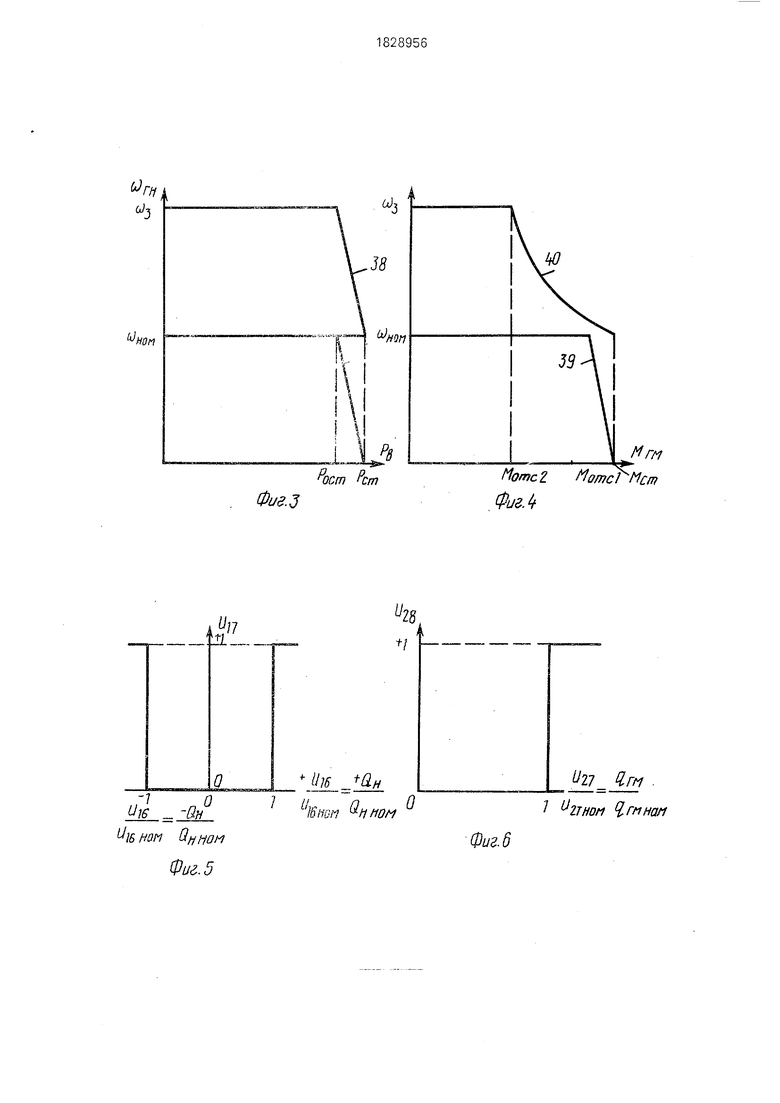
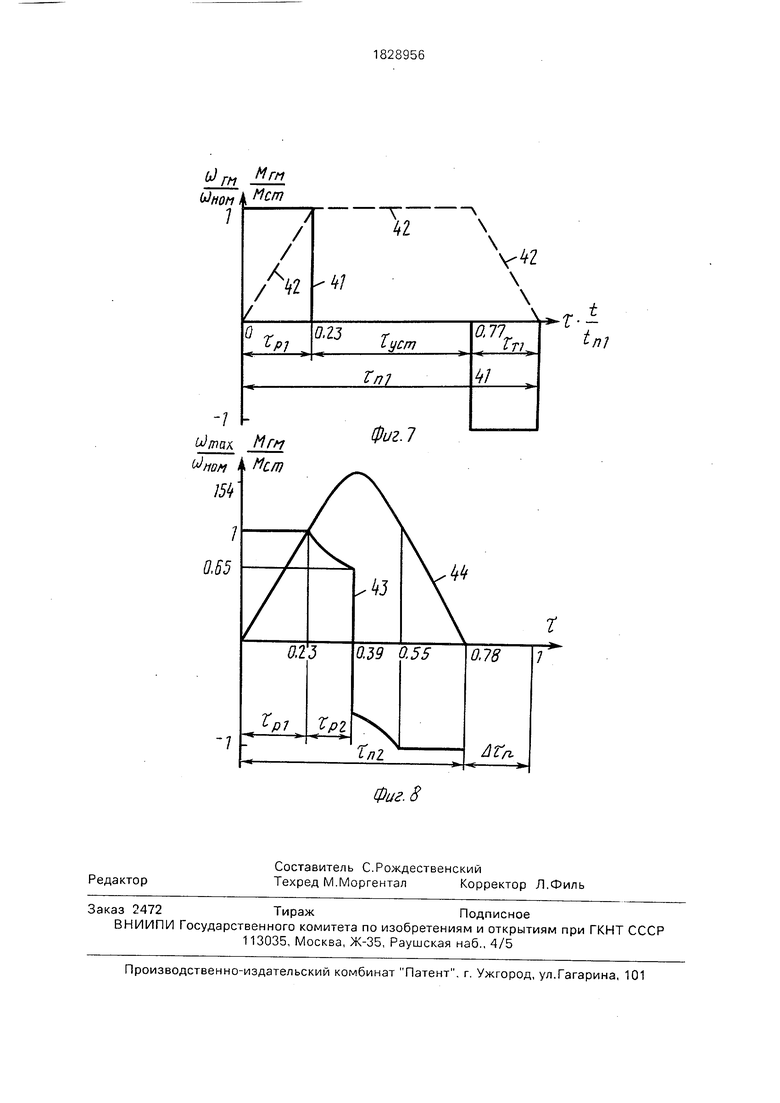
На фиг.1 изображена принципиальная схема электрогидравлической системы; на фиг.2 - графики зависимостей напряжений на выходах первого суммирующего усилителя, второго блока выделения модуля и третьего суммирующего усилителя от напряжения на выходе фазочувствительного выпрямителя; на фиг.З - зависимость давления в напорной гидравлической линии от частоты вращения гидромотора; на фиг.4 - зависимость между моментом гидромотора и частотой его вращения; на фиг.5 - характеристика первого релейного элемента; на фиг.6 - характеристика второго релейного элемента; на фиг.7 - график переходного процесса прототипа; на фиг.8 - график переходного процесса данной электрогидравлической системы.
Электрогидравлическая система содержит последовательно соединенные задат- чик 1 и фазочувствительный выпрямитель 2, а также первый суммирующий усилитель 3 и последовательно соединенные электрогидравлический усилитель 4, гидравлический механизм 5 изменения расхода регулируемого насоса 6, соединенного гидравлическими линиями 7, 8 с предохранительным клапаном 9 с регулируемым гидромотором 10, вал которого соединен с рабочим органом 11 (с большим моментом инерции), и соединенные с линиями 7, 8 датчики 12, 13 давления, выходы которых через первый и второй нелинейные элементы 14, 15 типа зона нечувствительности соединены соответственно с первым и вторым входами первого суммирующего усилителя 3. Система содержит также последовательно включенные датчик 16 тока электромагнита (не изображен) усилителя 4, первый релейный элемент 17, первый логический элемент НЕ 18, логический элемент И 19 и логический элемент ИЛИ 20, последовательно соединен- ные первый блок 21 выделения модуля, второй суммирующий усилитель 22, третий суммирующий усилитель 23, первый блок 24 выборки-хранения, электрогидравлический усилитель 25 и гидравлический механизм 26
управления, т.е. изменения рабочего объема регулируемого гидромотора 10, последовательно включенные датчик 27 тока электромагнита (не изображен) усилителя 25 и второй релейный элемент 28, а также
второй логический элемент НЕ 29, четвертый суммирующий усилитель 30, в цепь обратной связи которого включен третий нелинейный элемент 31 типа зона нечувствительности, второй блок 32 выделения модуля и второй блок 33 выборки-хранения, при этом второй вход логического элемента ИЛИ 20 подключен к выходу первого релейного элемента 17, выход логического элемента ИЛИ 20 подсоединен к управляющему
входу первого блока 24 выборки хранения, вход пепрвого блока 21 выделения модуля соединен с выходом первого нелинейного элемента 14, второй вход второго суммирующего усилителя 22 подсоединен к выходу
второго нелинейного элемента 15, второй вход третьего суммирующего усилителя 23 подключен к источнику (не изображен) опорного напряжения Don, выход второго релейного элемента 28 подключен ко входу
второго логического элемента НЕ 29, выход которого подсоединен ко второму входу логического элемента ИЛИ 20, выход фазочувствительного выпрямителя 2 соединен со входом четвертого суммирующего усилителя 30, выход которого подключен к третьему входу первого суммирующего усилителя 3, выход третьего нелинейного элемента 31 соединен со входом второго блока 32 выделения модуля, выход которого подсоединен к
третьему входу третьего суммирующего усилителя 23, выход пепрвого суммирующего усилителя 3 подключен ко входу второго блока 33 вбыорки-хранения, выход которого соединен со входом блока 4, а управляющий вход блока 33 подсоединен к выходу второго релейного элемента 28.
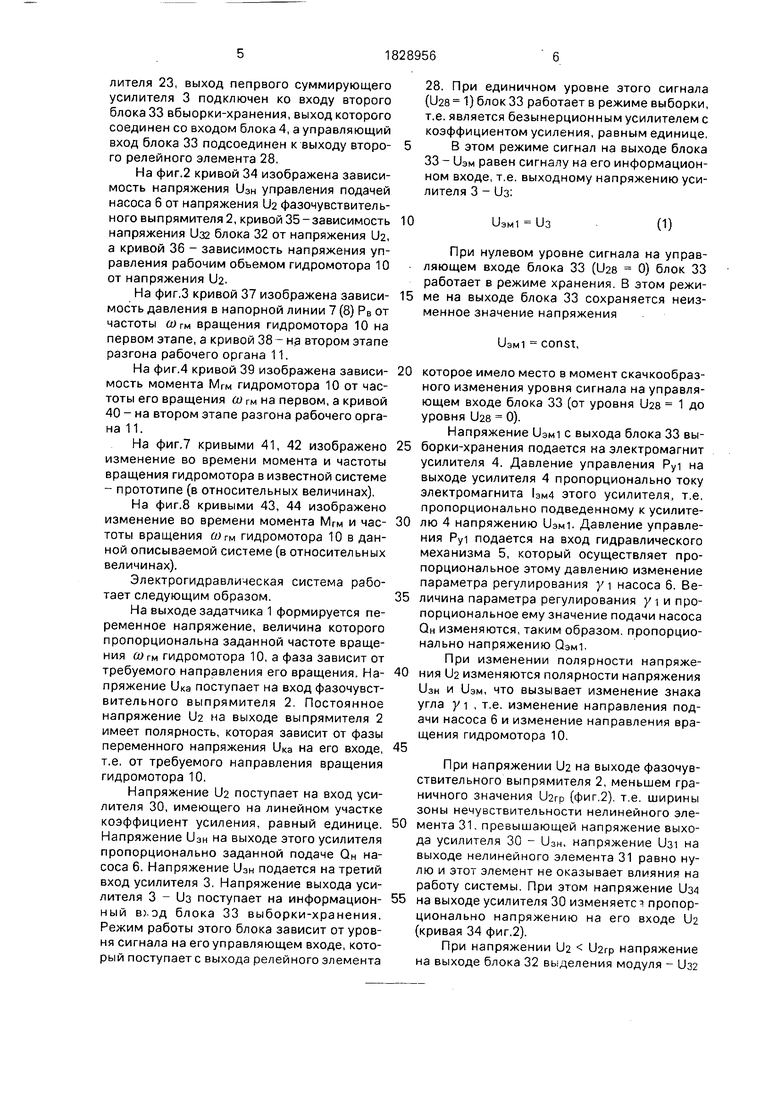
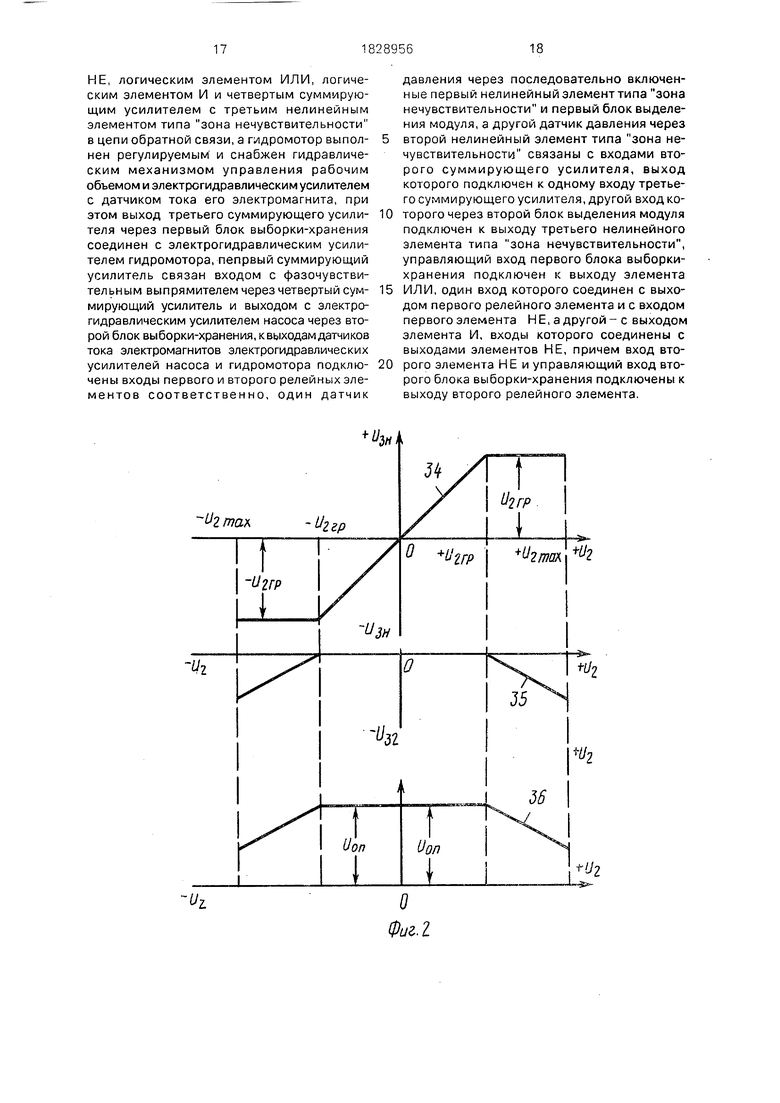
На фиг.2 кривой 34 изображена зависимость напряжения 113н управления подачей насоса 6 от напряжения 1)2 фазочувствитель- ного выпрямителя 2, кривой 35-зависимость напряжения 1)з2 блока 32 от напряжения 1)2, а кривой 36 - зависимость напряжения управления рабочим объемом гидромотора 10 от напряжения U2.
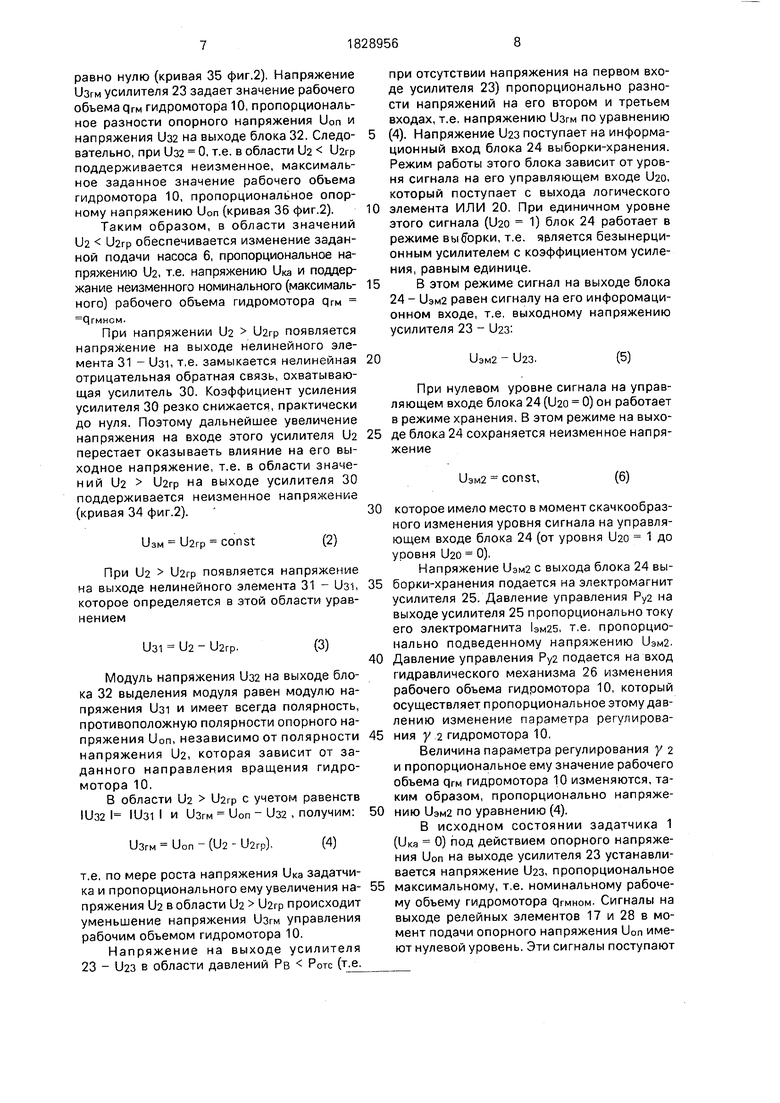
На фиг.З кривой 37 изображена зависимость давления в напорной линии 7 (8) Рв от частоты а) гм вращения гидромотора 10 на первом этапе, а кривой 38 - на втором этапе разгона рабочего органа 11.
На фиг.4 кривой 39 изображена зависимость момента МГм гидромотора 10 от частоты его вращения ш гм на первом, а кривой 40 - на втором этапе разгона рабочего органа 11.
На фиг.7 кривыми 41, 42 изображено изменение во времени момента и частоты вращения гидромотора в известной системе - прототипе (в относительных величинах).
На фиг.8 кривыми 43, 44 изображено изменение во времени момента Мгм и частоты вращения Шгм гидромотора 10 в данной описываемой системе (в относительных величинах).
Электрогидравлическая система работает следующим образом.
На выходе задатчика 1 формируется переменное напряжение, величина которого пропорциональна заданной частоте вращения Шгм гидромотора 10, а фаза зависит от требуемого направления его вращения. Напряжение U«a поступает на вход фазочувст- вительного выпрямителя 2. Постоянное напряжение U2 на выходе выпрямителя 2 имеет полярность, которая зависит от фазы переменного напряжения UKa на его входе, т.е. от требуемого направления вращения гидромотора 10.
Напряжение U2 поступает на вход усилителя 30, имеющего на линейном участке коэффициент усиления, равный единице. Напряжение Кзн на выходе этого усилителя пропорционально заданной подаче QH насоса 6. Напряжение Узн подается на третий вход усилителя 3. Напряжение выхода усилителя 3 - 11з поступает на информационный в.эд блока 33 выборки-хранения. Режим работы этого блока зависит от уровня сигнала на его управляющем входе, который поступает с выхода релейного элемента
33 - 11эм равен сигналу на его информационном входе, т.е. выходному напряжению усилителя 3 - Кз:
10
иЭМ1 из
(D
При нулевом уровне сигнала на управляющем входе блока 33 (U28 0) блок 33 работает в режиме хранения. В этом режи- ме на выходе блока 33 сохраняется неизменное значение напряжения
иэм1 const,
которое имело место в момент скачкообразного изменения уровня сигнала на управляющем входе блока 33 (от уровня U28 1 до уровня U28 0).
Напряжение Уэм1 с выхода блока 33 выборки-хранения подается на электромагнит усилителя 4. Давление управления РУ1 на выходе усилителя 4 пропорционально току электромагнита 3м4 этого усилителя, т.е. пропорционально подведенному к усилителю 4 напряжению 11Эм1. Давление управления РУ1 подается на вход гидравлического механизма 5, который осуществляет пропорциональное этому давлению изменение параметра регулирования у 1 насоса 6. Величина параметра регулирования у и пропорциональное ему значение подачи насоса Он изменяются, таким образом, пропорционально напряжению СЬм1.
При изменении полярности напряжения U2 изменяются полярности напряжения и3н и иэм, что вызывает изменение знака угла у 1 , т.е. изменение направления подачи насоса 6 и изменение направления вращения гидромотора 10.
При напряжении U2 на выходе фазочув- ствительного выпрямителя 2, меньшем граничного значения U2rp (фиг.2). т.е. ширины зоны нечувствительности нелинейного элемента 31. превышающей напряжение выхода усилителя 30 - U3H, напряжение Узт на выходе нелинейного элемента 31 равно нулю и этот элемент не оказывает влияния на работу системы. При этом напряжение U34
на выходе усилителя 30 изменяется пропорционально напряжению на его входе U2 (кривая 34 фиг.2).
При напряжении U2 U2rp напряжение на выходе блока 32 выделения модуля - Уз2
равно нулю (кривая 35 фиг.2). Напряжение изгм усилителя 23 задает значение рабочего объема q™ гидромотора 10, пропорциональное разности опорного напряжения Don и напряжения 1)з2 на выходе блока 32. Следовательно, при 11з2 0, т.е. в области U2 U2rp поддерживается неизменное, максимальное заданное значение рабочего объема гидромотора 10, пропорциональное опорному напряжению Uon (кривая 36 фиг.2).
Таким образом, в области значений U2 U2rp обеспечивается изменение заданной подачи насоса 6, пропорциональное напряжению U2, т.е. напряжению Ука и поддержание неизменного номинального (максимального) рабочего объема гидромотора q™
QrMHOM.
При напряжении U2 1)2гр появляется напряжение на выходе нелинейного элемента 31 - U31, т.е. замыкается нелинейная отрицательная обратная связь, охватывающая усилитель 30. Коэффициент усиления усилителя 30 резко снижается, практически до нуля. Поэтому дальнейшее увеличение напряжения на входе этого усилителя U2 перестает оказываеть влияние на его выходное напряжение, т.е. в области значений U2 U2rp на выходе усилителя 30 поддерживается неизменное напряжение (кривая 34 фиг.2).
U3M U2rp const
(2)
При U2 U2rp появляется напряжение на выходе нелинейного элемента 31 - Usi, которое определяется в этой области уравнением
U31 U2 - U2
гр.
(3)
Модуль напряжения U32 на выходе блока 32 выделения модуля равен модулю напряжения 1)з1 и имеет всегда полярность, противоположную полярности опорного напряжения Don, независимо от полярности напряжения IJ2, которая зависит от заданного направления вращения гидромотора 10.
В области U2 U2rp с учетом равенств Шз2 1 IU31 I и Us™ Uon U32 , получим:
Узгм Uon - (U2 - U2rp),
(4)
т.е. по мере роста напряжения U«a задатчика и пропорционального ему увеличения напряжения U2 в области U2 U2rp происходит уменьшение напряжения изгм управления рабочим объемом гидромотора 10.
Напряжение на выходе усилителя 23 - U23 в области давлений Рв Роте (т.е.
при отсутствии напряжения на первом входе усилителя 23) пропорционально разности напряжений на его втором и третьем входах, т.е. напряжению Us™ по уравнению
(4). Напряжение U23 поступает на информационный вход блока 24 выборки-хранения. Режим работы этого блока зависит от уровня сигнала на его управляющем входе U20, который поступает с выхода логического
элемента ИЛИ 20. При единичном уровне этого сигнала (U20 1) блок 24 работает в режиме выборки, т.е. является безынерционным усилителем с коэффициентом усиления, равным единице.
В этом режиме сигнал на выходе блока 24 - UsM2 равен сигналу на его инфоромаци- онном входе, т.е. выходному напряжению усилителя 23 - U23:
20
иЭМ2 - U23.
(5)
При нулевом уровне сигнала на управляющем входе блока 24 (U20 0) он работает в режиме хранения. В этом режиме на выхо- де блока 24 сохраняется неизменное напряжение
иЭм2 const,
(6)
которое имело место в момент скачкообразного изменения уровня сигнала на управляющем входе блока 24 (от уровня LJ20 1 до уровня U20 0).
Напряжение иэм2 с выхода блока 24 выборки-хранения подается на электромагнит усилителя 25. Давление управления РУ2 на выходе усилителя 25 пропорционально току его электромагнита Эм25, т.е. пропорционально подведенному напряжению 11Эм2.
Давление управления РУ2 подается на вход гидравлического механизма 26 изменения рабочего объема гидромотора 10, который осуществляет пропорциональное этому давлению изменение параметра регулирования у 2 гидромотора 10.
Величина параметра регулирования у 2 и пропорциональное ему значение рабочего объема q™ гидромотора 10 изменяются, таким образом, пропорционально напряжению иэм2 по уравнению (4).
В исходном состоянии задатчика 1 ( 0) под действием опорного напряжения Don на выходе усилителя 23 устанавливается напряжение LJ23, пропорциональное
максимальному, т.е. номинальному рабочему объему гидромотора ргмном. Сигналы на выходе релейных элементов 17 и 28 в момент подачи опорного напряжения U0n имеют нулевой уровень. Эти сигналы поступают
соответственно на входы логических элементов НЕ 18 и 29, на выходах которых появляются сигналы логической единицы. Сигналы с выхода элементов 18 и 29 поступают на входы логического элемента И 19, который при наличии сигналов единичного- уровня на обоих его входах имеет сигнал единичного уровня на выходе. Этот сигнал поступает на вход логического элемента ИЛИ 20 и на выходе последнего устанавли- вается сигнал логической единицы, благодаря чему блок 24 выборки-хранения начинает работать в режиме выборка.
При этом на выходе блока 24 устанавливается напряжение, равное напряжению U23 и пропорциональное максимальному рабочему объему гидромотора QTMHOM, на выходе усилителя 25 появляется номинальное давление управления РУ2, устанавливается максимальное значение параметра регули- рования гидромотора у2 и соответствующее ему номинальное, т.е. максимальное значение рабочего объема гидромотора а,гмном. После достижения этого значения рабочего объема гидромотора 10 на выходе релейного элемента 28 появляется сигнал единичного уровня (Uas 1), который приводит к появлению на входе логического элемента НЕ 29 сигнала логический нуль. Поэтому на выходе логического элемента И 19 также появляется сигнал логический нуль, вследствие чего напряжение на выходе логического элемента ИЛИ 20- LJ20 также становится равным логическому нулю и блок 24 выборки-хранения переходит в ре- жим хранения. В этом режиме работы блока 24 сохраняется максимальный рабочий объем гидромотора РГМНОМ.
После появления сигнала единичного уровня на выходе релейного элемента 28 блок 33 выборки-хранения переходит в режим выборки, поэтому при переводе задат- чика 1 из нулевого состония в состояние, при котором появляются напряжения UKa, U2, Кз4, под действием напряжения 1)Эм1 Уз начинает возрастать подача насоса Он и давление в напорной линии Рв. При увеличении давления Рв до значения Рв Роте появляется напряжение на выходе нелинейного элемента 14(либо 15), полярность которо- го противоположна полярности напряжения U2 на третьем входе усилителя 30, т.е . замыкается цепь нелинейной отрицательной обратной связи по давлению. Эта обратная связь формирует характеристику 37 фиг.З, т.е. механическую характеристику, соответствующую кривой 39 фиг.4, которая обеспечивает разгон рабочего органа 11 с большим моментом инерции при практически неизменном динамическом моменте гидромотора 10.
В течение всего процесса разгона рабочего органа 11 до номинальной скорости сохраняется неизменный, максимальный рабочий объем гидромотора 10с поддержанием заданного давления регулированием расхода (подачи)насоса 6.
Если напряжение U2 превышает граничное значение U2rp, то в рассматриваемом режиме на выходе усилителя 30 устанавливается максимальное напряжение, равное U2rp, т.е. на управление подачей насоса 6 поступает сигнал, пропорциональный номинальному заданному значению подачи насоса 6, а напряжение Узгм по уравнению (4) имеет значение, пропорциональное заданному рабочему объему гидромотора 10, т.е. заданной частоте вращения гидромотора 10, которая в случае LJ2 U2rp превышает номинальную частоту вращения гидромотора WHOM.
После достижения номинальной подачи насоса 6, т.е. номинальной частоты вращения гидромотора 10, на выходе релейного элемента 17 появляется сигнал единичного уровня (Ui 1). Этот сигнал поступает на вход логического элемента 20, на выходе которого появляется сигнал логической единицы, после чего блок 24 выборки-хранения переходит из режима хранения в режим выборки. На выходе блока 24 появляется напряжение, которое начинает уменьшать ток электромагнита Эм25 усилителя 25, давление управления Ру2 и параметр регулирования гидромотора у 2. Вследствие снижения тока электромагнита Эм25 на выходе релейного элемента 28 появляется сигнал нулевого уровня (U28 0), при этом блок 33 выборки- хранения переходит в режим хранения и сохраняет на своем выходе неизменное значение напряжения иэм1, соответствующее номинальной подаче насоса QHOM. Вследствие снижения рабочего объема гидромотора 10 давление Рв стремится возрасти. Когда это давление превысит значение давления отсечки Роте, появляется напряжение на выходе нелинейного элемента 14, которое через блок 21 выделения модуля поступает на первый вход усилителя 22 (поскольку появляется напряжение на выходе нелинейного элемента 15, поступающее на второй вход усилителя 22). Напряжение IJ22 имеет полярность, совпадающую с полярностью опорного напряжения (независимо от направления вращения гидромотора 10). При наличии напряжения U22 напряжение U23 на выходе усилителя 23 описывается уравнением:
U23 К2з(и3гм + U22),(7)
где
U22 Ki(PB - Роте),(8)
Ki - коэффициент пропорциональности. С учетом уравнения (4)
U23 - U2 + U2rp + Kl(PB - Роте). (9)
При возрастании давления Рв сигнал нелинейной отрицательной обратной связи по давлению воздействует на рабочий объем гидромотора 10 в направлении увеличения этого объема, т.е. в направлении снижения давления в линии 7 (8).
Благодаря этому формируется характеристика 38 фиг.З и соответствующая ей механическая характеристика 40 фиг.4, т.е. обеспечивается увеличение скорости гидромотора 10 путем снижения его рабочего объема при поддержании практически неизменного давления с помощью нелинейной отрицательной обратной связи подавлению, которая воздействует на рабочий объем гидромотора 10. После окончания процесса разгона устанавливается заданная, определенная величиной напряжения 1)2, частота вращения гидромотора ш зад О) ном (фиг.4).
В режиме торможения механизма (фиг.8) система работает аналогично описанному, причепм на первом этапе процесса торможения частота вращения снижается в результате постепенного увеличения рабочего объема гидромотора 10, а на втором этапе - путем снижения подачи насоса 6.
Давление отсечки Р0тс насоса 6 пропорционально ширине зоны нечувствительности нелинейных элементов 14 и 15. Стопорное значение давления РСт гидромотора 10 соответствует моменту начала разгона рабочего органа 11с большим моментом инерции, когда частота вращения гидромотора 10 равна нулю.
Разность давлений РСт Роте представляет собой статизм (т.е. ошибку регулирования) замкнутого контура автоматического регулирования давления. Обычно давление Роте близко к РСТ, т.е. в процессе разгона поддерживается практически неизменное давление в напорной линии (7 или 8).
Момент гидромотора Мгм и давление в напорной линии Рв связаны соотношением:
Мгм К1гм РВ
qrM
qrMHOM
(10)т.е. по мере увеличения частоты вращения
гидромотора О) ™ в области ш гм ш гмном момент гидромотора 10 снижается. При
где q™ - текущее значение рабочего объема гидромотора 10,
q™HOM - номинальное, максимальное значение рабочего объема гидромотора 10,
К.1ш - коэффициент пропорциональности.
Частота шгм вращения гидромотора 10 связана с подачей QH насоса 6 и рабочим объемом q™ гидромотора 10 зависимостью
-Эгмном
К2Г
9гм
(11)
где К2гм - коэффициент пропорциональности.
При постоянном номинальном рабочем объеме гидромотора 10, т.е. q™ qrMHOM const, что соответствует первому этапу процесса разгона, уравнение (10) принимает вид
Мгм К1гм Рв,
(12)
т.е. момент гидромотора 10 изменяется пропорционально давлению Рв.
В течение процесса разгона от нулевой до номинальной частоты вращения момент гидромотора Мгм изменяется от стопорного момента МСт до момента отсечки М0тс, которые пропорциональны соответственно давлениям РСТ И Роте.
На втором этапе процесса разгона, которому соответствует номинальная, неизменная подача (расход) QH QHHOM const
насоса 6, уравнение (11) принимает вид
- Ј1 гмном
qrMHOM
q™
(13)
где
ОДмном -
Q,
К2гм
(14)
номинальная частота вращения гидромотора 10, которая имеет место при номинальной подаче насоса 6 и номинальном, максимальном рабочем объеме гидромотора 10. Из уравнений (10) и (13) следует уравнение механической характеристики гидромотора 10 на втором этапе процесса разгона:
Мгм - Ктгм Рв
ЩГМНРМ WTM
(15)
поддержании практически неизменного давления в напорной гидролинии РВ РСТ это уравнение принимает вид:
Мгм Мет
СУМНОМ
WTM
(16)
т.е. механическая характеристика гидромотора 10 на этом этапе описывается гиперболой (кривая 40 фиг.4).
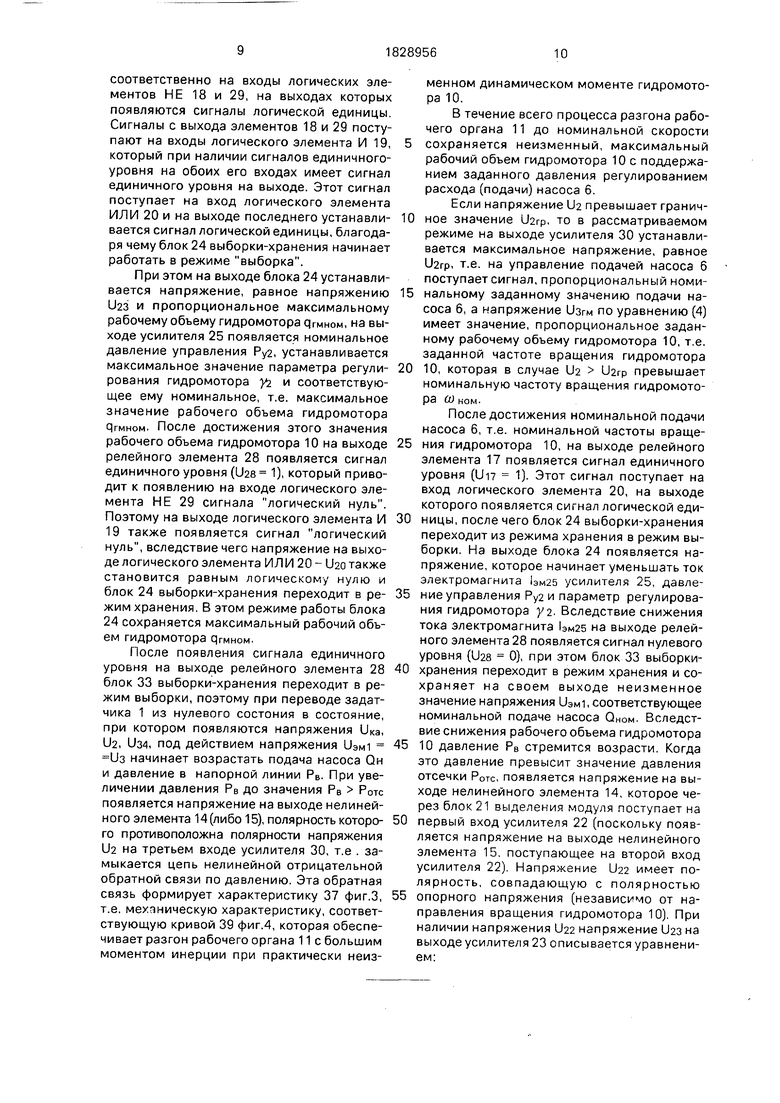
Напряжение Die на входе элемента 17 (фиг.5) пропорционально текущему значению подачи Он насоса 6. при подаче Он 0ном насоса 6 входное напряжение элемента 17 Uie Ui6HOM, при этом напряжение Ui на выходе релейного элемента 17 соответствует логическому нулю (Ui 0).
После достижения подачей насоса 6 номинального значения QH QHHOM, т.е. при достижении значения напряжения Die Ui6HOM, напряжение Ui становится равным логической единице lUiy 11 , причем полярность этого напряжения не зависит от полярности входного напряжения Uie.
Напряжение U 27 на входе элемента 28 (фиг.6) пропорционально текущему значению рабочего объема гидромотора q™. При значениях рабочего объема гидромотора q™ Чгмном. входное напряжение U27 и27ном, при этом напряжение Uas на выходе релейного элемента 28 соответствует логическому нулю I Ua8 01. При номинальном, рабочем объеме гидромотора q™ q™HOM, т.е. при напряжении U27 1127ном напряжение LJ28 на выходе релейного элемента 28 равно логической единице I U28 11.
Обозначим: т относительное
П1
значение текущего времени t, tni - полное время позиционирования прототипа,
tp1„,tr1
iSr и
Тр1
- относительные значения интервалов времени разгона от нулевой до номинальной частоты вращения и торможения, от номинальной частоты вращения до нулевой. Эти интервалы времени для фиг.7, 8 имеют равные значения;
TVCT
Туст - относительное значение
tn1
интервала времени, соответствующего вращению гидромотора 10 с установившейся номинальной частотой вращения.
На этом интервале времени момент гидромотора 10 практически равен нулю, по- скольк влияние сил статического сопротивления движению невеплико и им можно пренебречь;
0
tn относительно значение инtn1
тервала времени, соответствующего второму этапу работы - при неизменной номинальной подаче насоса 6 и регулировании частоты вращения гидромотора 10 в области выше номинальной путем изменения (уменьшения) рабочего объема гидромотора 10. Atn
Атп tn1
относительное значение
времени сокращения цикла позиционирования, обеспечиваемое данной системой по сравнению с прототипом.
Время разгона и торможения на первом этапе, т.е. при со гм ш ном - tpi и тТ1 определяется уравнениями:
tp1 tT1
WHOM
Ј1
(16)
где Јi
Мс
- ускорение на первом этапе
(при СОгм WHOM);
J - момент инерции рабочего органа 11.
Угловое перемещение аТ1 рабочего органа 11 на этом этапе (при УГМ WHOM) и угловое перемещение «Т1 на этапе торможения) определяется соотношением:
30
tt
«pi «т1 / са d t / Ј1 t d t - оо
35
Ј1 ГРт Шном TP1
22
(17)
поскольку
40
WHOM Ј1 tpi .
(18)
Угловое перемещение ауст рабочего органа в установившемся режиме (для фиг.7)
«уст а - (ар1 + ат 1) а - 2 «Р1 а-шном tpi(19)
где а- заданный угловой путь перемещения (т.е. позиционирования) рабочего органа. Время установившегося движения рабочего органа (для фиг.7)
55
«уст а ХР1
(20)
В данной системе (фиг.1) интервалы пути, равные Gpi и «Т1 не изменяются (фиг.8).
Поэтому на втором этапе работы (т.е. в области WCM WHOM рабочий орган 11 также проходит путь, равный ауст. Половину
GVcr этого пути «ри -о- он проходит в режиме постепенного снижения рабочего объема гидромотора 10 от номинального - q™ до минимального - q.-ммин (при поддержании номинальной подачи насоса 6) и соответствующего уравнению (13) роста частоты вращения WTM.
#УСТ
ВТОРУЮ ПОЛОВИНУ ЭТОГО ПУТИ Gfrll ра
бочий орган 11 проходит в режиме постепенного увеличения рабочего объема гидромотора 10 отцгмтт до ргмном (при поддержании номинальной подачи насоса 6) и соответствующего уравнению (13) снижения частоты вращения Ш гм.
Уравнение движения рабочего органа 11:
Мгм J
d WrM
d t
(21)
с учетом зависимости (15) принимает вид rMdWrM - dt , (22)
ИЛИ
Мет WHOM
J
HUIV1 -f l .
а
(ином
(23)
где шгм WHOM начальное значение частоты вращения гидромотора 10, соответствующее моменту времени т 0.
Уравнению (23) соответствует следующая зависимость для скорости гидромото- ра 10 на втором этапе работы (при со гм
Ш ном)
j.
WrM - WHOM t i
tp1
(24)
Угловое перемещение рабочего органа 11 на этом этапе определяется уравнением
tpii(// т
«рп / wrMdt - , (25) 50
о
откуда после соответствующих преобразований, получаем зависимость для времени разгона t рц
/2
tpii 0,125 +0,28125 -У&-&- WTMHOM
-0.5 tpi
(26)
Общее время работы системы на этом этапе
tn tpn + TJH 2t pii т.е.
10
tn -2 0,125 +0,28125 1 -tpi
СУгмном
(27)
Сокращение времени А позиционирования рабочего органа 11, которое обеспечивается предложенной системой по сравнению 15 с прототипом:
Atn tn1 tn2,
(28)
где tni - время позиционирования прототи- 20 па ( 7п1 его относительное время позиционирования),
tn2 врепмя позиционирования системы фиг.1 ( ГП2 - ее относительное время позиционирования).
25С учетом приведенных выше зависимостей сокращение времени позиционирования может быть представлено в виде:
Atn tycT - t|l
(29)
30 ит/|
Л in
а
WHOM
35
2 0,125 tji +0,28125 rJ|CT tp1
WfMriOM
(30)
5
0
5
Формула изобретения Электрогидравлическая система, содержащая последовательно связанные за- датчик, фазочувствительный выпрямитель, первый суммирующий усилитель, электрогидравлический усилитель с датчиком тока его электромагнита и гидравлический механизм изменения расхода регулируемого насоса, соединенного гидравлическими линиями с гидромотором, вал которого соединен с рабочим органом, а также второй и третий суммирующие усилители и датчики давления в гидравлических линиях, связанные через первый и второй нелинейные элементы типа зона нечувствительности с двумя входами первого суммирующего усилителя, отличающаяся тем, что, с целью повышения быстродействия, она снабжена двумя блоками выделения модуля, двумя релейными элементами, двумя блоками выборки-хранения, двумя логическими элементами
НЕ, логическим элементом ИЛИ, логическим элементом И и четвертым суммирующим усилителем с третьим нелинейным элементом типа зона нечувствительности в цепи обратной связи, а гидромотор выполнен регулируемым и снабжен гидравлическим механизмом управления рабочим объемом и электрогидравлическим усилителем с датчиком тока его электромагнита, при этом выход третьего суммирующего усили теля через первый блок выборки-хранения соединен с электрогидравлическим усилителем гидромотора, пепрвый суммирующий усилитель связан входом с фазочувстви- тельным выпрямителем через четвертый сум мирующий усилитель и выходом с электрогидравлическим усилителем насоса через второй блок выборки-хранения, к выходам датчиков тока электромагнитов электрогидравлических усилителей насоса и гидромотора подключены входы первого и второго релейных элементов соответственно, один датчик
-
,-
2 /ШХ
давления через последовательно включенные первый нелинейный элемент типа зона нечувствительности и первый блок выделения модуля, а другой датчик давления через второй нелинейный элемент типа зона нечувствительности связаны с входами второго суммирующего усилителя, выход которого подключен к одному входу третьего суммирующего усилителя, другой вход ко10 торого через второй блок выделения модуля подключен к выходу третьего нелинейного элемента типа зона нечувствительности, управляющий вход первого блока выборки- хранения подключен к выходу элемента
15 ИЛИ, один вход которого соединен с выходом первого релейного элемента и с входом первого элемента Н Е, а другой - с выходом элемента И, входы которого соединены с выходами элементов НЕ, причем вход вто- 20 рого элемента НЕ и управляющий вход второго блока выборки-хранения подключены к выходу второго релейного элемента.
/7/
сЛ
4У
w/ч
Фиа.З
Рост Pern
и№ноп &пном
MIS нам QHHOM
Фиг.
5
Mm Моте г tlomcfMcm
Фиг.Ь
% +1
U27 2т .
1 VZTHOM гннап
Фиг. 6
| Электрогидравлическая система | 1989 |
|
SU1779805A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
