1
(21)4487294/15 (22)26.10.88 (46)23.12.92. Бюл №47
(71)Алтайский тракторный завод им. М.И.Калинина
(72)Ю.И.Спирин
(56)Авторское свидетельство СССР N° 1281210,кл А 01 G 23/08,1984
(54) ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА
(57)Изобретение относится к машинам для сплошных и лесохозяйственных рубок с последующей трелевкой Машина содержит базовую установку 1 с энергетическим узлом, кабиной оператора, средствами управ. . -tf.g MaMHKfoa.
ления и ззхватно-срезающйе устройства 5 с собственными движителями, связанные с базовой установкой тросами 6 и каналами энергоснабжения. Новым в машине является применение на базовой установке 1 поворотных платформ с откидными двузвенными трапами 8, наличие центрального процессора, не допускающего перегрузки энергетического узла, оснащение захватно-срезающих устройств 5 системами самонаведения, блоками управления и адаптивными звеньями подвески пильных шин и захватных механизмов с обеспечением поступательного перемещения пильных
(ЛИН 1 1 ИЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАПРАВЛЕННОЙ ВАЛКИ ДЕРЕВЬЕВ | 2013 |
|
RU2540544C2 |
| Устройство управления лесозаготовительной машиной | 1990 |
|
SU1757532A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1996 |
|
RU2127038C1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1998 |
|
RU2130249C1 |
| УСТРОЙСТВО ДЛЯ ЗАГОТОВКИ ДРЕВЕСИНЫ | 1999 |
|
RU2164741C2 |
| ВАЛОЧНО-ТРЕЛЕВОЧНАЯ МАШИНА | 1995 |
|
RU2105466C1 |
| Лесозаготовительная машина | 1990 |
|
SU1824098A1 |
| Лесозаготовительная машина | 1982 |
|
SU1074448A1 |
| Лесозаготовительная машина | 1981 |
|
SU1020076A1 |
| Лесозаготовительная машина | 1987 |
|
SU1442134A1 |

ел
с
vj
iOO
;ю
ifc
;сл
Фие.1
Изобретение относится к устройствам для сплошных лесохозяйственных рубок деревьев с последующей трелевкой и может быть использовано в лесной промышленности. 1
Наибольшее распространение получили лесозаготовительные машины в конструкциях которйУ применены захзатно-срезающие устройства с пильными фрезами или поворотным шинами с пильными цепями и клеь щевымй за хватными механизмами, устанавливаемыми на стрелах манипуляторов или рамах базовых машин (Барановский В.А., Некрасов P.M. Системы машин для лесозаготовок. М.: Лесная промышлен- ность. 1977).,. , ,
Известна лесозаготовительная маилтнаГ включающая базовую установку с знер- гетическим узлом, кабину управления, одно или WecKOflbKO захватно-срезающих уст- ройств с движителями, связанных с базовой установкой тросами через тяго вую лебедку и блок управления (авт.св. № 1281210, КЛ. АШ G 23/08, 1984),, . ,
Недостатком известной машины явля- ется ограниченная производительность и узость технологических возможностей вследствие необходимости постоянной силовой связи захватно-срёзающ его устройства с поворотной платформой и обес- печения направленной валки посредством удержания дерева манипулятором, необходимости поворота платформы на одном технологическом шаге при повышенных требованиях к функциональным возможно- стям оператора в связи с трудностями визуального контроля за рабочим процессом из-за удаленности рабочего органа.
Известка также манипуляторнай валоч- но-пакетирующая машина, включающая ба- зо вую установку с энергетическим узлом, кабину управления, блок управления и за- хватно-срезающее устройство, связанное с базовой установкой гидроманипулятором и каналами энергоснабжения (ТРУДЫ ЦНИИ- МЭ. Химки. 1981).
Недостатком машины является низкая производительность и узость технологических возможностей вследствие невозможности перемещения по крутым склонам и слабонесущим грунтам, необходимости обеспечения направленной валки посредством удерхония дерева манипулятором и необходимости перемещения базовой установки на технологический шаг при валке каждого дерева.
Цель изобретения - расширение технологических возможностей и повышение производительности за счет улучшения условий труда оператора, самостоятельного
съезда захватно-срезающих устройств с поворотных платформ с обеспечением их раз - грузки введением адапти вной схемы и обеспечением направленного повала де-„ ревьев рационально направленным перем е- щением пильной шины... Поставленная цель достигается тем, что лесозаготов ительная машина, Содержащая базовую установку с энергетическим узлом, кабину управления, одну или несколько поворотных платформ, каждая из которых имеет средства управления и захватно-срё- зающее устройст&о с движителем, свя зан-, нбе с базовой установкой трбсами через тяговую лебедку, и блок управления обеспе- чивает самостоятельный съезд заУватно- срезающих устройств Путем оснащения поворотных платформ откидными двухшар- нирнымй трапами и автоматический реж:им следования к срезаемому дереву введением в каждый блок управления двух рядов расположенных веером светочувствительных да тчиков, а для обеспечения направленной валки каждый захватный механизм и пильная шина с механизмом продольной подачи установлен на шарнирно связанной с движителем вильчатой раме.
Сопоставительный анализ с прототипом позволяет сделать вывод, что заявляемая лесозаготовительная маилЛнз отличается тем, что поворотные платформы снабжены откидными двузвенными трапа- м и для съезда захватно-срезающих устройств, а в прототипе захватно -срез ающее устройство постоянно находится на платформе. Кроме того, блоки управления снабжены расположенными веером светочувствительными датчиками, в отличие от прототипа, а исполнительные органы выполнены откидными относительно движите- лей и обеспечивают поступательное перемещение пильной шины по вильчатой раме, тогда как в прототипе захватный механизм не откидывается при перемещении захватно-срезающего устройства и пильная шина выполнена поворотной.
Анализ известных технических решений в исследуемой области и смежных областях показывает, что перемещение захватно-срезающих устройств совместно с базовой машиной прм каждом последующем срезании дерева, удержание дерева для обеспечения направленной валки, визуальный или локационный контроль процесса не обеспечивают высокой производительности труда и суживают технологические возможности: в заявляемом решении устранены эти недостатки путем повышения мобильности, снижения энергозатрат и улучшения условий труда оператора
Дистанционно пилотируемые летательные аппараты содержат средства самонаведения, имеющие блоки автоматического сопровождения целей, блоки отсчета углов которых имеют гироскопические устройства, формирующие управляющие сигналы посредством бортовых ЭВМ, сложность их конструкции очевидна в заявляемом решении, поскольку существует необходимость поддерживать лишь директивное направление движения, блок управления включает два ряда расположенных веером фотодиодов
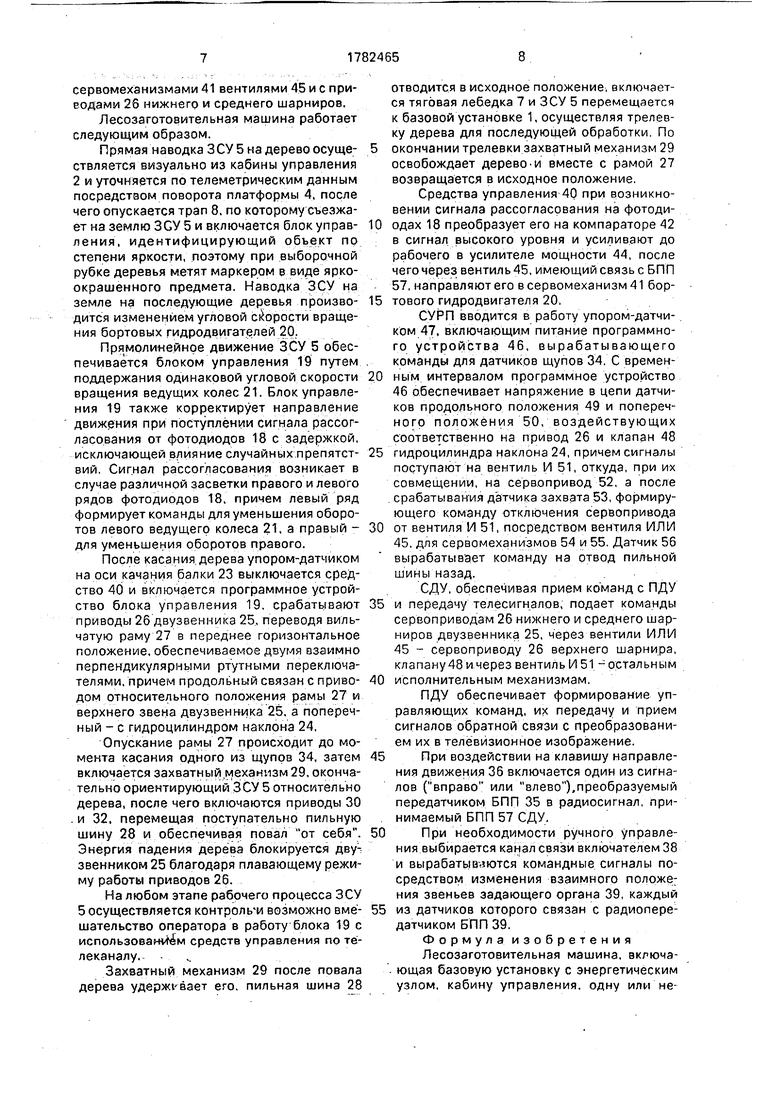
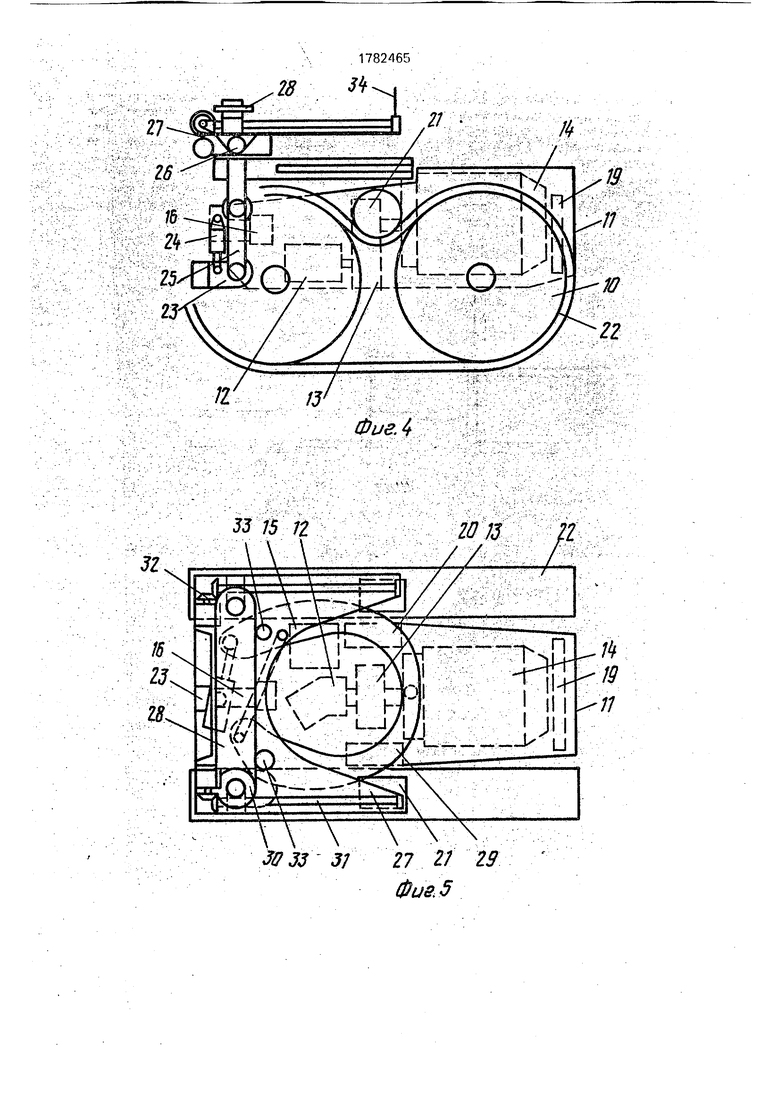
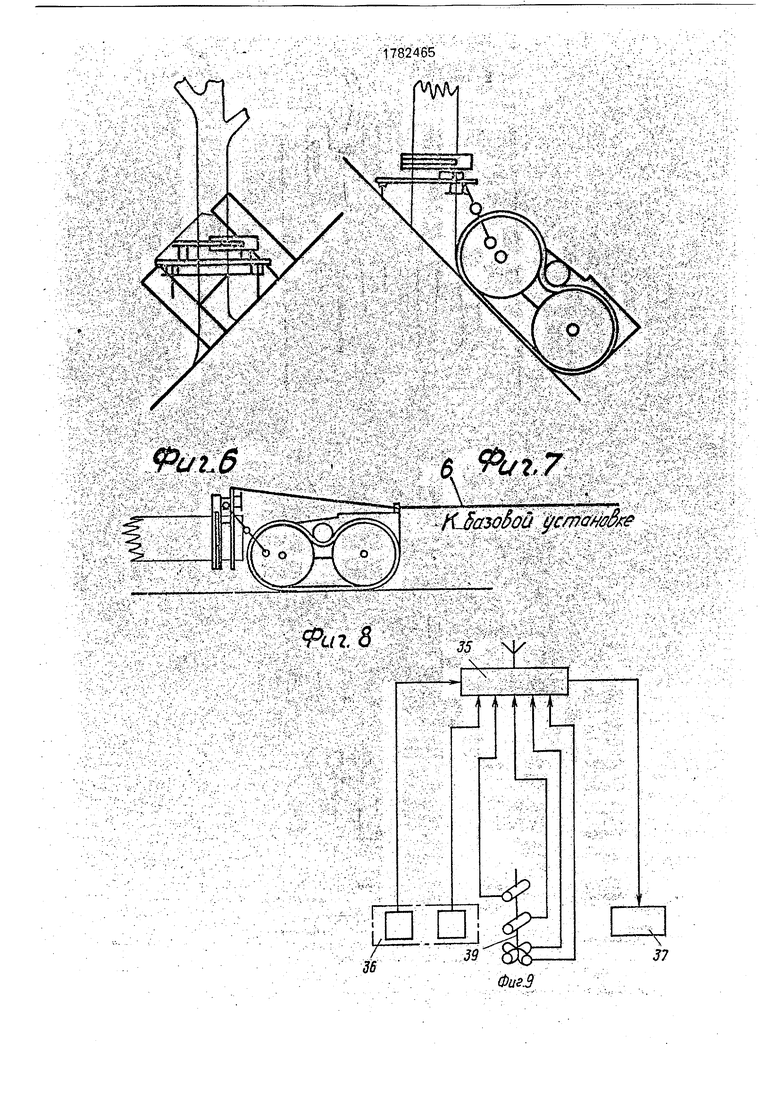
На фиг.1 показана предлагаемая лесозаготовительная машина в транспортном положении; на Фит 2 - вид сбоку на поворотную платформу с установленным на ней захватно-срезающимустройство ; на фиг 3 -- схема размещения светочувствительны датчиков, на фиг 4 - захватно-срезающее устройство; на фиг 5 - вид сверху на захватно-срезающее устройство, показанное на фиг.4; на фиг б - 8 - положение захватно- ерезающего устройства при валке дерева поперек и вдоль склона, а также при трелевке, на фиг 9 - схема пульта дистанционного управления; на фиг 10 - компоновка поста управления; на фиг 11 - схема управления
Лесозаготовительная машина включает базовую установку 1 с кабиной управления 2, энергетическим узлом 3 поворотными платформами 4 с захватно-срезающими устройствами (ЗСУ) 5 и средствами управления, связанными с базовой установкой 1 тросами 6 посредством тяговых лебедок 7 Каждая поворотная платформа 4 содержит откидной двузвенный трап 8 в шарниры 9 которого встроены приводы изменения взаимного положения звеньев
Каждое ЗСУ 5 имеет собственный движитель, опорные катки 10 которого жестко связаны осями качения с корпусом 11 В корпусе 11 расположены гидронасос 12, редуктор 13, электродвигатель 14 клапанная коробка 15, телекамера 16, в задней фокальной плоскости 17 объектива которой размещены фотодиоды 18 связанные с блоком управления 19, гидродвигатели бортовых приводов 20 ведущих колес 21 связанных силами трения с резиновыми армированными стальньми тросами гусеницами 22 Спереди корпуса 11 на центральной оси качания расположена балка 23 связанная с корпусом также гидроцилиндром наклона 24, и датчик-упор
Балка 23 шарнирно связана с двузвен- ником 25, каждый шарнир которого содержит привод 26 служащий адаптивным
звеном для ориентации вильчатой рамы 27 и связанных с ней пильной шины 28 и захватного механизма 29 Пильная шина 29 содержит гидропривод цепи 30 и перемеща- ется по вильчатой раме 27, используя передачу 31 винт-гайка, с помощью приводов 32 На вильчатой раме 27 установлены два регулируемых щупа 34, являющихся датчиками высоты плоскости ртеза,
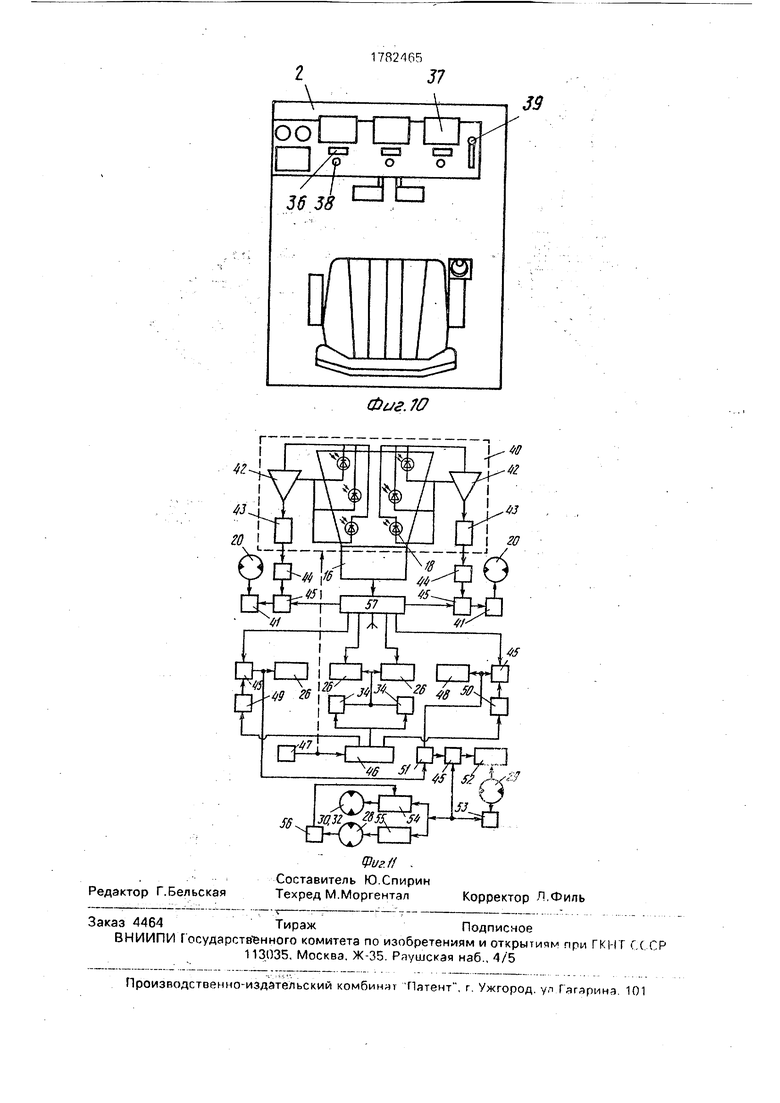
0 Кабина управления 2 содержит пульт дистанционного управления (ПДУ) 35, имеющий передатчик системы радиоуправления, связанный с. клавищами направления движения 36 и задатчиками положений шар5 ниров двузвенниКа 25 и телеприемника электрически связанного с экранами 37 отображения визуальной информации, количественно равными числу ЗСУ 5, под которыми, в зоне моторного поля операто0 ра, расположены клавиши направления движения 36 и включатели какала работы 38, а также задающий орган 39 геометрически подобный двузвеннику 25
Фотодиоды 18 бяока управления 19 рас5 положены веером так, что при поперечных колебаниях ЗСУ в Типичных условиях эксплуатации они не пересекают вертикальной оси директивного направления движения каждый из рядов которых связан через
0 средства управления 40 являющиеся системой самонаведения, лобортно с механизмами 41 приводов 20 посредством компараторов 42, усилителей мощности 44 и вентилей ИЛИ 45 Причем фотодиоды 18
5 соединены с компаратором 42 параллельно Система управления рабочим процессом (СУРП) ЗСУ содержит блок программного устройства 46 (включаемый в работу упором-датчиком 47 на оси качания балки 23)
0 выключающего средства управления 40 связанного с привода-ми 26 нижнего и среднего шарнира двузвенника 25 посредством параллельно соединенных датчиков-щупов 34 а с приводом 26 верхнего шарнира и
5 клапаном 48 гидроцилиндра наклона 24 - посредством вентилей ИЛИ 45 через датчики продольного 49 и поперечного 50 положения вильчатой рамы 27
Датчики 49 и 50 также связаны вентиля
0 ми И 51 посредством вентиля ИЛИ 45 с сервоприводом 52 захватного механизма
29имеющего датчик захвата 53 формирующий команды обратной связи и сервомеханизмов 54 и 55 воздействующих на привод
5 пильной шины 28 со связью через приводы
30и 32, связанных с датчиком 56
Система дистанционного управления (СДУ) содержит БПП 57, состоящий из приемника системы радиоуправления и телепередатчика БПП связан с телекамерой 16 с
сервомеханизмами 41 вентилями 45 и с приводами 26 нижнего и среднего шарниров.
Лесозаготовительная машина работает следующим образом.
Прямая наводка ЗСУ 5 на дерево осуществляется визуально из кабины управления 2 и уточняется по телеметрическим данным посредством поворота платформы 4, после чего опускается трап 8, по которому съезжает на землю ЗСУ 5 и включается блок управления, идентифицирующий объект по степени яркости, поэтому при выборочной рубке деревья метят маркером в виде ярко- окрашенного предмета. Наводка ЗСУ на земле на последующие деревья производится изменением угловой скорости вращения бортовых гидродвигателей 20.
Прямолинейное движение ЗСУ 5 обеспечивается блоком управления 19 путем поддержания одинаковой угловой скорости вращения ведущих колес 21. Блок управления 19 также корректирует направление движения при поступлении сигнала рассогласования от фотодиодов 18 с задержкой, исключающей влияние случайных препятствий, Сигнал рассогласования возникает в случае различной засветки правого и левого рядов фотодиодов 18, причем левый ряд формирует команды для уменьшения оборотов левого ведущего колеса 21, а правый - для уменьшения оборотов правого.
После касания дерева упором-датчиком на оси качания балки 23 выключается средство 40 и включается программное устройство блока управления 19. срабатывают приводы 26 двузвенника 25, переводя вильчатую раму 27 в переднее горизонтальное положение, обеспечиваемое двумя взаимно перпендикулярными ртутными переключателями, причем продольный связан с приводом относительного положения рамы 27 и верхнего звена двузвенника 25, а поперечный - с гидроцилиндром наклона 24,
Опускание рамы 27 происходит до момента касания одного из щупов 34, затем включается захватный механизм 29, окончательно ориентирующий ЗСУ 5 относительно дерева, после чего включаются приводы 30 и 32. перемещая поступательно пильную шину 28 м обеспечивая повал от себя. Энергия падения дерева блокируется дву- звенником 25 благодаря плавающему режиму работы приводов 26.
На любом этапе рабочего процесса ЗСУ 5 осуществляется контролен возможно вмешательство оператора в работу блока 19 с использоваж м средств управления по телеканалу.
Захватный механизм 29 после повала дерева удерживает его, пильная шина 28
отводится в исходное положение, включается тяговая лебедка 7 и ЗСУ 5 перемещается к базовой установке 1, осуществляя трелевку дерева для последующей обработки По
окончании трелевки захватный механизм 29 освобождает дерево и вместе с рамой 27 возвращается в исходное положение.
Средства управления 40 при возникновении сигнала рассогласования на фотоди0 одах 18 преобразует его на компараторе 42 в сигнал высокого уровня и усиливают до рабочего в усилителе мощности 44, после чего через вентиль 45, имеющий связь с БПП 57, направляют его в сервомеханизм 41 бор5 тового гидродвигателя 20.
СУРП вводится в работу упором-датчиком 47, включающим питание программного устройства 46, вырабатывающего команды для датчиков щупов 34. С времен0 ным интервалом программное устройство 46 обеспечивает напряжение в цепи датчиков продольного положения 49 и поперечного положения 50, воздействующих соответственно на привод 26 и клапан 48
5 гидроцилиндра наклона 24, причем сигналы поступают на вентиль И 51, откуда, при их совмещении, на сервопривод 52, а после срабатывания датчика захвата 53, формирующего команду отключения сервопривода
0 от вентиля И 51, посредством вентиля ИЛИ 45, для сервомеханизмов 54 и 55 Датчик 56 вырабатывает команду на отвод пильной шины назад.
СДУ, обеспечивая прием команд с ПДУ
5 и передачу телесигналов, подает команды сервоприводам 26 нижнего и среднего шарниров двузвенника 25, через вентили ИЛИ 45 - сервоприводу 26 верхнего шарнира, клапану 48 и через вентиль И 51 - остальным
0 исполнительным механизмам.
ПДУ обеспечивает формирование управляющих команд, их передачу и прием сигналов обратной связи с преобразованием их в телевизионное изображение.
5 При воздействии на клавишу направления движения 36 включается один из сигналов (вправо или влево),преобразуемый передатчиком БПП 35 в радиосигнал, принимаемый БПП 57 СДУ.
0 При необходимости ручного управления выбирается канал связи включателем 38 и вырабатываются командные сигналы посредством изменения взаимного положения звеньев задающего органа 39, каждый
5 из датчиков которого связан с радиопередатчиком БПП 39.
Формула изобретения Лесозаготовительная машина, включающая базовую установку с энергетическим узлом, кабину управления, одну или не
сколько поворотных платформ, каждая из которых имеет средства управления и за- хватно-срезающее устройство с движителем, связанное с базовой установкой тросами через тяговую лебедку, и блок управления, отличающаяся тем, что, с целью расширения технологических возможностей и повышения производительности, каждая поворотная платформа снабжена откидным двузвенным трапом
0
для съезда захвэтно-срезающего устройства захватный механизм и пильная шина которого установлены на вильчатой раме шарнирно связанной с движителем и имеющей привод продольной подачи пильной шины, а блок управления снабжен двумя рядами расположенных веером светочувствительных датчиков для управления поворотом влево или вправо захватно-срезающего устройства
Фие.1
Фиг.З
JJ 75 12
30 33 J/
/4
ФиеЛ
27 2 29
Фие.5
ш/ш
6 Ъп. 7
.
ftJtasoSoii ycwawfae
ФигЗ
ЛootZJ
I1
LJ/r
C3
о
f-m
«Л rfb
.;rs jCTj
ЛУ
37
Л
f-m-i I
о U
Xх
.
