Изобретение относится к машиностроению, а именно к механизмам дли перемещения инструмента или изделия в пространстве, и может быть использовано при конструировании измерительного, копировального или прессового оборудования для обработки металлов давлением.
Известно устройство для преобразования дв ижеШяТсойёржащее основание, с которым шарнирно связаны в центрах подобия звенья механизма пантографного типа, образованного двумя симметрично расположенными с идентичными размерами звеньев пантографами, удлиненные звенья которых сочленены между собой ведущим звеном, два средних ведомых звена, связанных шарнирно с возможностью поступательного перемещения с сШгветству- ющими парами симметричных ведомых звеньев пантографов.
Недостатком известного устройства являются его ограниченные функциональные возможности.
Известно устройство для преобразования движения, содержащее основание, среднее ведомое звено, воспроизводящее движение в уменьшенном масштабе, и связанное с возможностью поступательного перемещения с механизмом пантографного типа, образованным двумя симметрично расположенными с идентичными размерами звеньев пантографами, удлиненные звенья которых сочленены между собой шарниром, воспроизводящим движение в увеличенном масштабе и шарнирно связаны с соответствующей парой смежных с ни- ми и параллельных друг другу ведомых звеньев, одно из которых связано с эксцентриком, установленным в эксцентрично рас- положенном отверстии втулки, геометрическая ось которой расположена между ведомыми звеньями. Шарнир, соединяющий удлиненные звенья пантографов выполняет функции ведущего звена.
Недостатком известного устройства являются его ограниченные функциональные возможности.
Целью изобретения является расширение функциональных возможностей устройства за счет снабжения его дополнительными ведущими звеньями, при повышении жесткости механизма пантографного типа.
Это достигается тем, что устройство для преобразования движения, содержащее основание, среднее ведомое звенчо, связанное с возможностью поступательного перемещения с механизмом пантографного типа, образованного двумя симметрично расположенными с идентичными размерами
звеньев пантографами, удлиненные звенья которых сочленены между собой ведущим звеном и связаны шарнирно с соответствующей парой смежных с ними и параллельных друг другу ведомых звеньев, одно из которых связано с эксцентриком, установленным в эксцентрично расположенном отверстии втулки, геометрическая ось которой расположена между ведомыми звеньями,
0 согласно изобретению, каждый пантограф снабжен дополнительной втулкой, связанной шарнирными соединениями, располо- женными на ней эксцентрично с его удлиненным и параллельным удлиненному
5 звеньями, и расположенной соосно с втулкой, снабженной дополнительным отверстием с установленным в нем дополнительным эксцентриком, соединенным с другим ведомым звеном пантографа,
0 причем соединения втулок со звеньями пантографов расположены между шарнирными соединениями, связывающими между собой звенья пантографов, центр подобия каждого пантографа расположен на непод5 вижной относительно основания геометрической оси втулок, и среднее ведомое звено связано шарнирно с одной из пар симметричных ведомых звеньев.
Одна из втулок одного пантографа кине0 матически связана с одной из втулок другого пантографа,
Устройство снабжено дополнительным средним ведомым звеном, связанным шарнирно со второй парой симметричных ведо5 мых звеньев с возможностью поступательного перемещения противофаз- но среднему ведомому звену.
Часть каждого удлиненного звена, связанная с ведомыми звеньями и параллель0 ное ему звено, выполнены в виде втулок, установленных в соответствующих отверстиях дополнительной втулки.
Звенья пантографов, параллельные соответствующим удлиненным звеньям, вы5 полнены удлиненными во внешнюю сторону на одинаковую величину и связаны между собой посредством дополнительного ведущего среднего звена с возможностью его поступательного перемещения противо0 фазно ведущему звену.
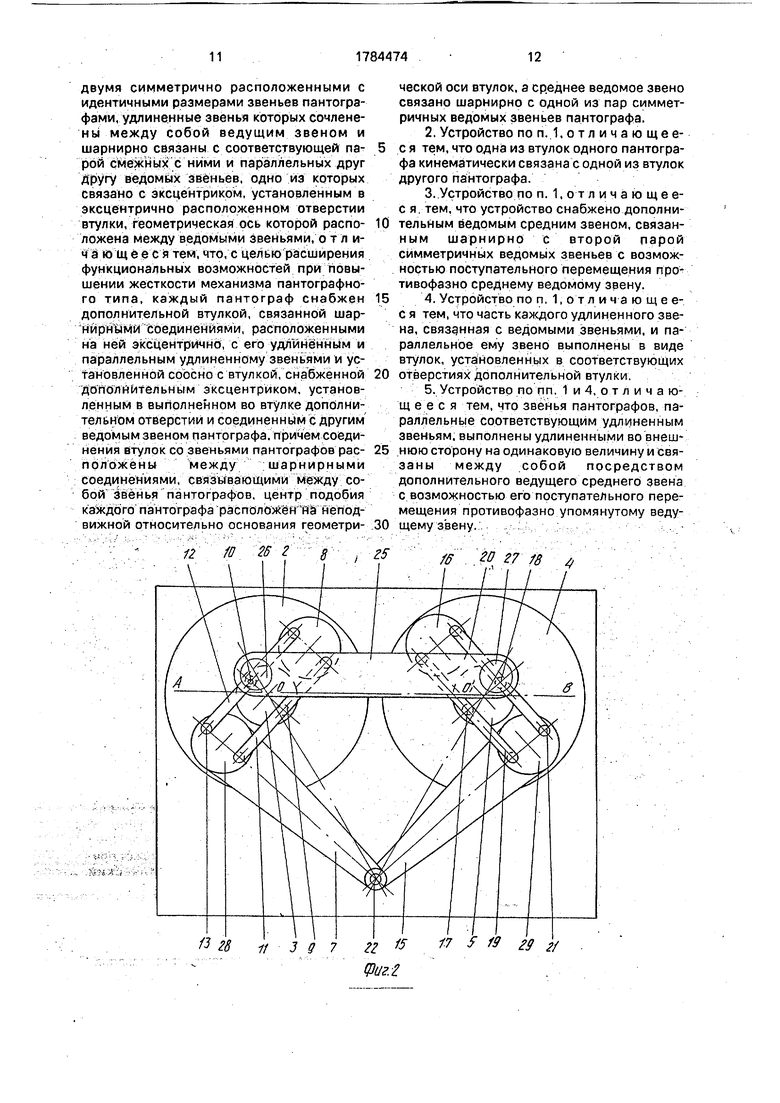
На фиг. 1 представлено устройство для преобразования движения; на фиг. 2 - то же устройство, только часть удлиненных и параллельных им звеньев пантографов выпол 5 нены в виде втулок; на фиг. 3 - то же устройство, за исключением того, что ведомые звенья связаны шарнирами с дополнительным средним звеном; на фиг. 4 - то же устройство, когда втулки жестко связаны с ведомыми зубчатыми колесами.
Устройство, представленное на фиг. 1, содержит основание 1, в двух отверстиях которого установлены попарно, соосно расположенные одна в другую втулки 2, 3 и 4, 5. С втулкой 2 связаны опорами вращения, выполненными в виде шарниров б, удлиненное и параллельное ему звенья 7 и 8 одного пантографа. Звенья 7 и 8 выполнены в виде двуплечих рычагов. С втулкой 3 связаны опорами вращения, выполненными в виде эксцентриков 9 и 10, ведомые звенья 11 и 12 выполненные в виде двуплечих рычагов, смежных удлиненному и ему параллельному звеньям 7, 8 м соединенных с ними шарнирами 13. С втулкой 4 связаны опорами вращения, выполненными в виде шарниров 14, удлиненное и параллельное ему звенья 15 и 16 другого пантографа, выполненные в виде двуплечих рычагов. С втулкой 5 связаны опорами вращения, выполненными в виде эксцентриков 17 и 18, ведомые звенья 19 и 20, выполненные в виде двуплечих рычагов. Звенья 19 и 20 смежные удлиненному и параллельному звеньям 15, 16 и соединены с ними шарнирами 21. При этом центры О и О подобия каждого из пантографов, образованных звеньями 7, 8, 11, 12 и 15, 16, 19, 20. совмещены с геометрическими осями втулок 2, 3 и 4,5 соответственно. Удлиненные звенья 7 и 15 сочленены между собой шарниром, выполняющем роль ведущего звена 22. Ведомые симметричные звенья 11 и 19 каждого пантографа связаны шарнирами 23 и 24 со средним звеном 25. Ведомые звенья 12 и 20 снабжены шарнирами 26 и 27 соответственно.
Устройство, представленное на фиг. 2 аналогично устройству на фиг. 1, только части удлиненных и параллельных им звеньев 7, 8 и 15,16 пантографов, связанные с ведомыми звеньями 11, 12 и 19. 20, выполнены в виде втулок 28, 8 и 29, 16 соответственно. Среднее ведомое звено 25 связано шарнирами 26 и 27 с ведомыми звеньями 12 и 20 соответственно.
Устройство на фиг. 3 аналогично устройству на фиг. 1 за исключением того, что ведомые звенья 12 и20связаны шарнирами 26 и 27 с дополнительным средним ведомым звеном 30 с возможностью поступательного перемещения последнего противофазно со средним звеном 25. Оси шарниров 23, 26, 24 и 27 выполнены в виде цапф, сопряженных на звеньях 11, 12, 19 и 20с эксцентриками 9, 10, 17 и 18 соответственно. Звенья 8 и 16 выполнены с удлиненными во внешнюю сторону на одинаковую величину концами и шарнирно связа Гы с дополнительным средним ведущим звеном 31 с возможностью поступательного перемещения последнего противофазно ведущему звену 22.
Устройство, представленное на фиг, 4 аналогично устройству представленному на
фиг. 3, за исключением того, что втулки 2 и 4 жестко связаны с ведомыми зубчатыми колесами 32 и 33 соответственно, которые связаны с общим для них ведущим зубчатым колесом 34.
Устройство, представленное на фиг. 1 работает следующим образом.
Под действием силы F, приложенной к ведущему звену 22 (например, со стороны исполнительного механизма, формирующего траекторию перемещения), последнее перемещается в направлении ее .действия. Согласно известному свойству механизма пантографного типа геометрические оси шарниров 23 и 24, сзязанных с ведомыми
звеньями 11 и 19, повторяют траекторию перемещения ведущего звена 22 в уменьшенном масштабе. Среднее ведомое звено 25, подвешенное на шарнирах23 и24 повторяет траекторию их передвижения, перемещаясь при этом поступательно и синфазно с ведущим звеном 22, поскольку они расположены по одну сторону от центров О и О подобия пантографов.
При подвеске среднего звена 25 к ведомым звеньям 12, 20 оно перемещается противофазно ведущему звену 22, т.к. в этом случае звено 22 и шарниры 26 и 27 находятся по разные стороны от прямой АВ, проходящей через центры О и О подобия. При
этом сила F, действующая на ведущее звено 22 может быть разложена на составляющие силы FI и F2, действующие вдоль удлиненных звеньев 7 и 15 соответственно (силы, действующие в одном направлении, для упрощения показаны одинаковыми). Под действием силы FI, приложенных к шарнирам 6 и 13, связывающим звено 7 с ведомыми звеньями 11, 12 и со втулкой 2, последние поворачиваются на одинаковый по величине угол а относительно отрезка АВ прямой линии, проходящей через центры О и О1 подобия пантографов. Аналогичным образом под действием сил Fa ведомые звенья 19 и 29 и втулка 4 поворачиваются на одинаковый по величине угол аг относительно отрезка АВ. При этом каждому положению ведущего звена 22 соответствует определенная совокупность углов «1,0:2 поворота втулок 2 и 4 соответственно.
Под действием силы F2, приложенной к концуудлиненного звена 7,последнее поворачивается относительно геометрической оси шарнира 6 и взаимодействует через шарниры 13, звенья 11, 12 и эксцентрики 9,
10 с втулкой 3. При этом звено 7, геометрические оси эксцентриков 9. 10 и втулка 3 поворачиваются на одинаковый по величине угол Оз относительно отрезка АВ, Аналогичным образом под действием силы FI, приложенной к конце удлиненного звена 15, это звено 15, геометрические оси эксцентриков 17, 18 и втулка 5 поворачиваются на одинаковый по величине угол ОА относительно отрезка АВ. Причем каждому положению ведущего звена 22 на плоскости соответствует определенная совокупность углов #з , Щ поворота втулок 3 и 5 относительно центров О и О1 подобия соответственно или наклона звеньев 7 и 15 относительно отрезка АВ. Таким образом, положение ведущего звена 22 и, следовательно, ведомого среднего звена 25 на плоскости может быть задано совокупностью значений углов а или «з поворота одной из втулок 2 или-3 в одной пантографе и углов О2. или «4 поворота одной из втулок 4 или 5 в другом пантографе или совокупностью величин разности между значениями углов а , «з поворота втулок 2, 3 и значениями углов (%i, ОА поворота втулок 4, 5. При использовании в качестве ведущих звеньев втулок 2 и 4 устройство работает следующим образом при повороте втулок 2 и 4, например, с помощью зубчатой передачи (не показана) они взаимодействуют через шарниры 6 и 14, звенья 7,8 и 15,16 с ведомыми звеньями 11, 12 и 19,20. При этом угол поворота (наклона) звеньев 11, 12 равен углу а- поворота втулки 2, а угол поворота звеньев 19 и 20 равен углу аз. поворота втулки 4 относительно отрезка АВ. Поскольку звенья 11,12 и 19, 20 выполнены в виде двуплечих рычагов, обладают повышенной (вдвое) по сравнению с одноплечими рычагом нагрузочной способностью, что способствует сохранению работоспособности устройства при увеличении нагрузок. Во время поворота втулок 2 и 4 часть усилия от втулки 2 через шарнир 6, звено 22 приложено к концу звена 15, которое поворачивается на плоскости относительно отрезка АВ, и взаимодейству- етчерез шарниры 21, звенья 19,20 и эксцентрики 17, 18 с втулкой 5, которая поворачивается вокруг центра О , относительно отрезка АВ на угол сц , численно равный углу наклона звена 15 к отрезку АВ, как накрестлежащие. В то же время часть усилия от втулки 4 через шарнир 14, звено 15 и звено 22 приложено к концу звена 7, которое поворачивается на плоскости относительно отрезка-АВ,и взаимодействует через шарниры 13, звенья 11, 12 и
эксцентрики 9, 10 с втулкой 3, которая поворачивается вокруг центра О относительно отрезка АВ на угол оз , численно равный углу наклона звена 7 относительно отрезка
АВ. При этом ведущее звено 22 и среднее ведомое звено 25 перемещаются синфазно и занимают на плоскости положение, соответствующее совокупности значений углов а и сц поворота втулок 2 и 4 относительно отрезка АВ, причем определенная последовательность таких совокупностей соответствует определенным траекториям перемещения звеньев 22 и 25.
Следует отметить, что устройство не теряет работоспособности в случае остановки одной из втулок 2 или 4, например, в результате выхода из строя привода - остановки втулки 2. Тогда при повороте втулки 4 звено 7 вращается вокруг шарнира б и ведущее
звено 22 передвигается по траектории дуги окружности с радиусом равным расстоянию от шарнира 6 до ведущего звена 22,
Устройство, представленное на фиг. 2, работает следующим образом: при принудительном повороте втулок 2 и 4 они взаимодействуют через втулки 8, 28 и 16, 29, звенья 7 и 15 с ведомыми звеньями 11, 12 и 19, 20, причем угол поворота втулок 8, 28 относительно центра О1 подобия равен углу
поворота втулки 2, а угол поворота втулок 16, 29 относительно центра О подобия равен углу поворота втулки 4. В то же время взаимодействие между собой удлиненных звеньев 7 и 15, вызванное вращением втулок 2 и 4, приводит к вращению втулок 8, 28 и 16, 29 вокруг своих геометрических осей. При этом угол поворота втулки 3, связанной с втулками 8, 28 посредством звеньев 11,12 и шарниров 9, 10, 13 равен алгебраической
сумме углов поворотов втулок 2, 8 или 2, 28 вокруг своих геометрических осей, или углу- под которым звено 7 направлено к отрезку АВ. Угол поворота втулки 5, связанной с втулками 16, 29 посредством звеньев 19, 20
и шарниров 21,17,18 равен алгебраической сумме углов поворота втулок 4, 16 или 4, 29 вокруг своих геометрических осей или углу, под которым звено 15 направлено к отрезку АВ. В то же время вращение втулок 2 и 4,
вызывающее взаимодействие между собой звеньев 7 и 15, приводит к передвижению в плоскости звена 22, ведущего по отношению к среднему ведомому звену 25 и воспроизводящего по отношению к нему
движение в увеличенном масштабе. При этом звено 25 перемещается противофазно звену 22 вследствие того, что они расположены по разные стороны от отрезка АВ, что расширяет функциональные возможности
устройства, в частности, осуществляется его самобалансировка за счет уравновешивания звеном 25 веса звеньев 7 и 15. Из-за того, что ведомые звенья 11, 12 и 19, 20 имеют по три опоры в виде втулок 3, 8, 28 и 5, 16, 29 и части звеньев 7, 15 выполнены в виде втулок 28, 29 механизм пантографного типа обладает повышенной жесткостью, что способствует сохранению функций устройства в более широком диапазоне, например, в более широком диапазоне изменять масштаб копирования.
Работа устройства, представленного на фиг. 3 осуществляется как и устройства, представленном на фиг 1, только оно может управляться также и от дополнительного ведущего звена 31, причем звено 31 перемещается протмвофззно звену 22. При этом средние ведомые звенья 25 и 30 перемещаются противофазно друг другу При одинаковом абсолютном значении масштаба копирования их траектории повернуты друг относительно друга на 180° и равноудалены От отрезка АВ. Это позволяет поворачивать или вращать изделие (приспособление, звено другого механизма и т д.) с круглым, эл- липсообразным или иным профилем, обладающим симметрией вращения четного порядка между звеньями 25 и 30, практически без смещения геометрической оси изделия в пространстве, причем при круглом профиле изделия звенья 22 и 31 перемещаются по прямой линии вдоль отрезка АВ. Такая возможность устройства может быть использована, например, в микроэлектронике для точного поворота приспособлений или в конструкциях пресса с дбумя подвижными ползунами, например, для протяжки опор валов или осей В этом случае неподвижность геометрической оси части изделия, подвергающейся протяжке, облегчает поддержку остальной его части, находящейся вне зоны действия ползунов, что позволяет упростить конструкцию приспособлений, манипуляторов, обеспечивающих такую поддержку Поскольку наличие двух средних звеньев 25 и 30, имеющих одинаковую массу (при одинаковом абсолютном значении масштаба копирования) практически полностью уравновешивает подвижные массы устройства относительно центров О и О1 подобия, дисбаланс в устройстве также отсутствует, а энергия удара замыкается в силовом контуре, образованном звеньями (ползунами) 25 и 30, втулками 2,3, 4, 5 и связывающими их эксцентриками 9, 10, 17, 18 и цапфами 23, 26, 24, 27, что устраняет вибрацию основания 1, При этом сопряженность эксцентриков 9, 10, 17,18 с соответствующими цапфами 23, 26, 24, 27
повышает жесткость как силового контура, так и контура, образованного звеньями 7, 8, 11, 12 и 15, 16, 19, 20 пантографов
Устройство, предстаЁленное на фиг, 4
работает следующим образом: при повороте ведущего зубчатого колеса 34 зубчатые колеса 32 и 33, и связанные с ними соответствующие втулки 2, 4 также поворачиваются, причем разность между значениями
углов поворота втулок 2, 4 относительно отрезка АВ остается постоянной, что обеспечивает побтбянство траектории перемещения звена 22 при повороте колеса 34 на один и тот же угол в любую сторону и
при повторении таких поворотов. При этом звенья 22, 25 перемещаются противофазно звеньями 30, 31, т к. расположены по разные стороны от отрезка АВ. Сила, приводящая в действие устройство, может быть
приложена также и к звеньям 22 и 31, однако траектория их перемещения при неизменном значении передаточного отношения междуЪэлес ами 34 и 32, 34 и 33 зависит от величины разности между значениями углов о. и #2 поворота втулок 2 и 4. Для изменения формы траектории перемещения звеньев 22, 34 и, следовательно, звеньев 25,30 может быть изменена величина разности между значениями упов
а- и С(2 поворота втулок 2 и 4 или изменены свойства связывающей их передачи, например, изменен знак ее или изменяется значение передаточного of ношения между втулками 2, 4 в процессе их поворота. Согласно приведенной траектории Т перемещения звеньев 25, 30 при приближении каждого из них друг к другу, они перемеща- ются противофазно вдоль отрезка АВ Это качество может быть использовано, например, в конструкциях гильотин, где изделие, закрепленное на уровне отрезка АВ взаимодействует с двумя скользящими относительно него режущими элементами звеньев 25, 30, что позволяет осуществить качественную обрезку изделия с равномерным износом режущих поверхностей звеньев 25 и 30, Таким образом, использование предлагаемого устройства обеспечивает преобразование движения заданной величины по
двум координатам в движение или перемещение изделия в пространстве и может принести определенный экономический эффект
Формула изобретения
1. Устройство для преобразования движений, содержащее основание, среднее ведомое звено, связанное с возможностью поступательного перемещения с механизмом пантографного типа, образованного
двумя симметрично расположенными с идентичными размерами звеньев пантографами, удлиненные звенья которых сочлене- ны между собой ведущим звеном и шарнирно связаны с соответствующей парой смежных с ними и параллельных друг другу ведомых звеньев, одно из которых связано с эксцентриком, установленным в эксцентрично расположенном отверстии втулки, геометрическая ось которой расположена между ведомыми звеньями, отличающееся тем, что, с целью расширения функциональных возможностей при повышении жесткости механизма пантографно- го типа, каждый пантограф снабжен дополнительной втулкой, связанной шарнирными соединениями, расположенными на ней эксцентрично, с его удлиненным и параллельным удлиненному звеньями и установленной соосно с втулкой, снабженной дополнительным эксцентриком, установленным в выполненном во втулке дополнительном отверстии и соединенным с другим ведомым звеном пантографа, причем соединения втулок со звеньями пантографов рас- положены между шарнирными соединениями, связывающими между собой звенья пантографов, центр подобия каждого пантографа расположен на неподвижной относительно основания геометрии
10
15
20
25
30
ческой оси втулок, а среднее ведомое звено связано шарнирно с одной из пар симметричных ведомых звеньев пантографа.
2.Устройство поп. Ч.отличающее- с я тем, что одна из втулок одного пантографа кинематически связана с одной из втулок другого пантографа.
3.Устройство поп. 1,отличающее- с я тем, что устройство снабжено дополнительным ведомым средним звеном, связан- ным шарнирно с второй парой симметричных ведомых звеньев с возможностью поступательного перемещения про- тивофазно среднему ведомому звену.
4.Устройство по п. 1,отличэющее- с я тем, что часть каждого удлиненного звена, связанная с ведомыми звеньями, и параллельное ему звено выполнены в виде втулок, установленных в соответствующих отверстиях дополнительной втулки.
5.Устройство по пп. 1 и 4, отличающее с я тем, что звенья пантографов, параллельные соответствующим удлиненным звеньям, выполнены удлиненными во внешнюю сторону на одинаковую величину и свя- заны между собой посредством дополнительного ведущего среднего звена с возможностью его поступательного перемещения противофазно упомянутому ведущему звену.


| название | год | авторы | номер документа |
|---|---|---|---|
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Копир | 1986 |
|
SU1433842A1 |
| Транспортное средство | 1979 |
|
SU880853A1 |
| Кулисно-рычажный прямолинейно-направляющий механизм повышенной точности и привод для колесных транспортных средств, приводимых в движение мускульной силой человека | 2017 |
|
RU2664852C1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| Стенд для испытания цепей | 1985 |
|
SU1265515A2 |
| Импульсивный вариатор | 1984 |
|
SU1193341A1 |
| ШАГАЮЩАЯ ОПОРА | 1994 |
|
RU2086450C1 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИНТЕЗА И АНАЛИЗА МАЛЬТИЙСКИХ МЕХАНИЗМОВ | 1971 |
|
SU290854A1 |
| Стенд для испытания цепей | 1986 |
|
SU1449854A2 |


Использование: при конструиро§ании измерительного, копировального или прессового оборудования для обработки металлов давлением. Сущность1 под действием силы, приложенной к ведущему звену 22, оно перемещается в направлении ее действия. Среднее ведомое звено 25 перемеща/ 2 J/026 2 Л Л 23 7 ется поступательно и синфазно с ведущим звеном 22. При подвеске звена 25 к ведомым звеньям 12 и 20 оно перемещается про- тивофззно звену 22. Под действием силы, приложенной к шарнирам 13 и 6, связывающим звено 1 с ведомыми звеньями 11, 12 и со втулкой 2, последние поворачиваются на одинаковый по величине угол относительно прямой АВ, а ведомые звенья 19.20 и втулка 4 также поворачиваются на одинаковый по величине угол относительно того же отрезка, Каждому положению ведущего звена 22 на плоскости соответствует определенная совокупность углов поворота втулок 2 и 4, 3 и 5 относительно центров О и О, т.е. положение ведущего звена 22 и ведомого 25 задано на плоскости совокупностью значений углов поворота одной из втулок 2, 3, 4 или 5. 4 з п. ф-лы, 4 ил. и )Ј (Л С xj 00 N а 15 2ij 3 М JU-1
12 10 Я
ft 28 11 3 д
20 27 f8 4
L
22 &
Фиг. г
17 5 fff Јff 2/
3t X
г
Фиг
| Копир | 1986 |
|
SU1433842A1 |
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Изобретатель и рационализатор | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
