S

Изобретение относится к способам перемещения хлыстов на заданные длины сортиментов и может быть использовано в раскряжевочных установках. Цель изобретения - повышение производительности и точности отмера. В процессе реализации способа после соударения торцов хлыстов с упорами регистрируют время перемещения их до полной остановки, а возврат в нужное положение осуществляют посредством использования утилизованной энергии от хлыста. Устройство содержит цепной конвейер с механическим тормозом и лотком. Хлысты, движущиеся на промежуточной скорости, ударяют в выставленный упор и отклоняют его. Энергия хлыстов запасается гидросистемой устройства и при обратном перемещении хлыста выставляет его в нужное положение. 2 с и 4 з.п.ф-лы, 17 ил.
Изобретение относится к способам перемещения хлыстов на заданные длины сортиментов и может быть использовано в раскряжевочных установках.
Целью изобретения является повышение производительности и точности отмера.
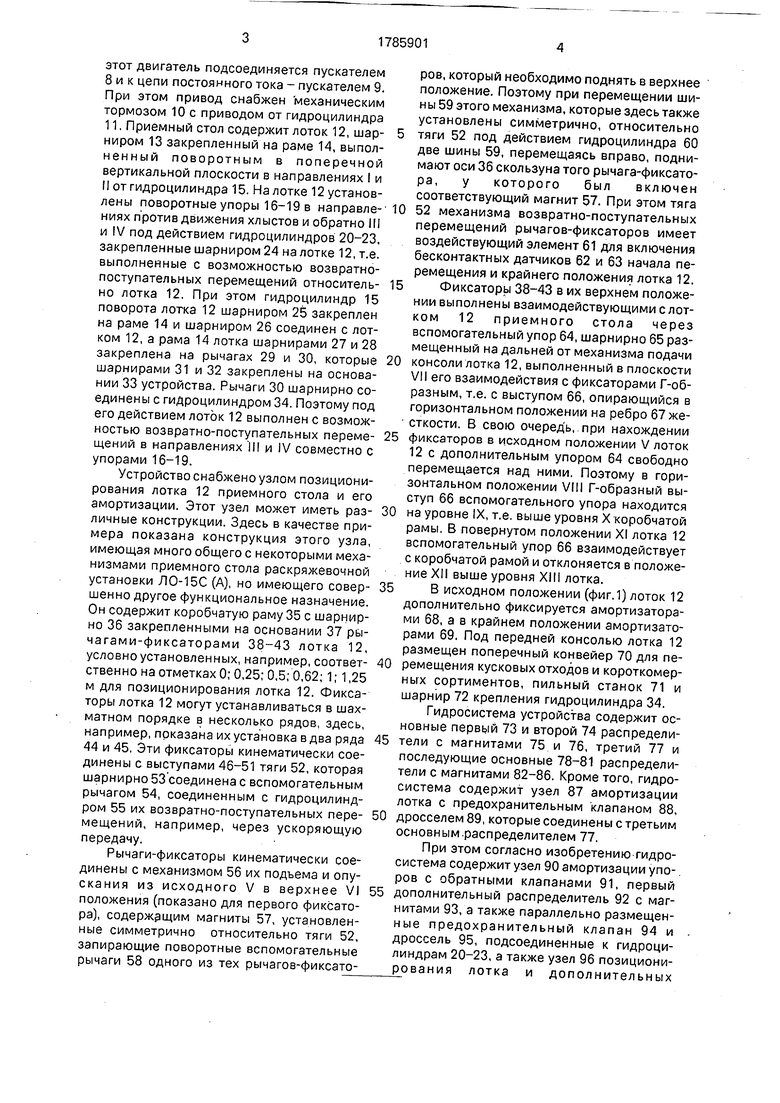
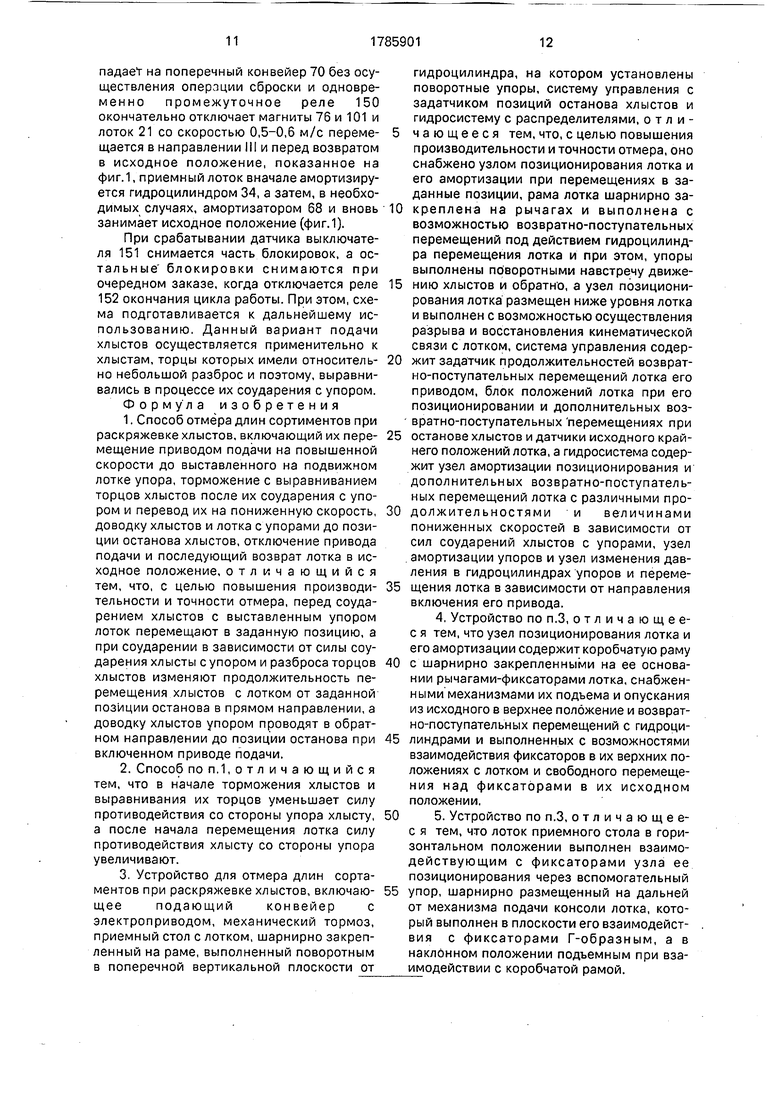
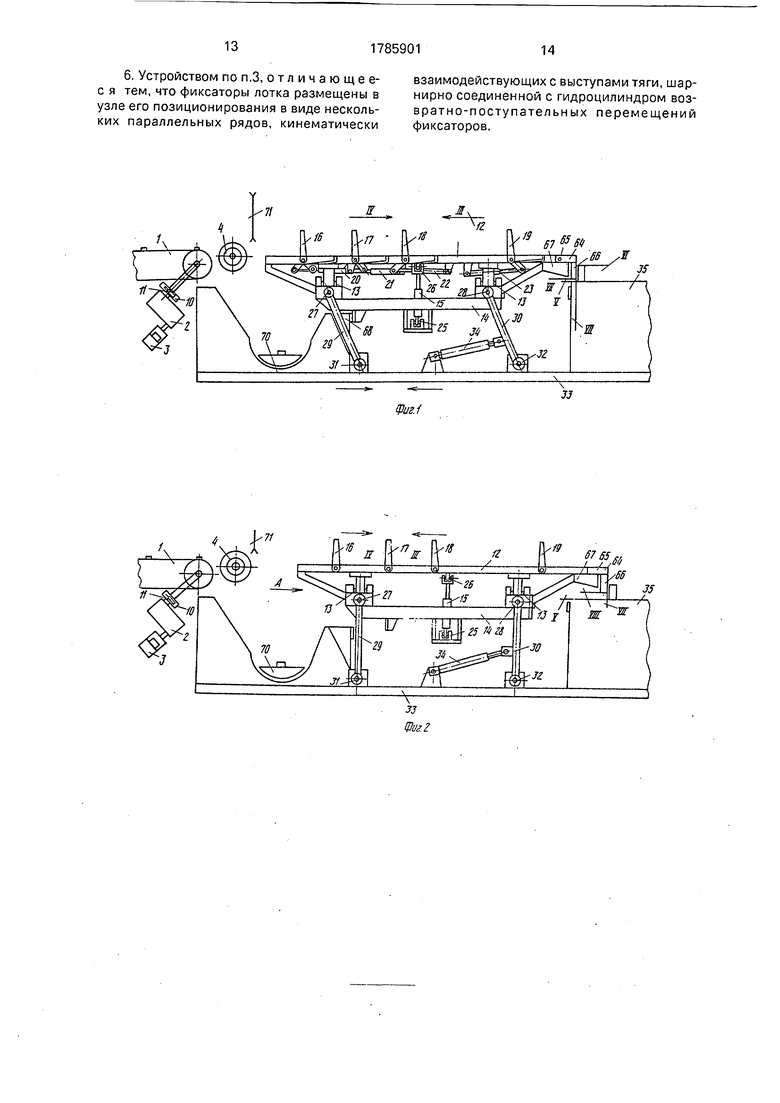
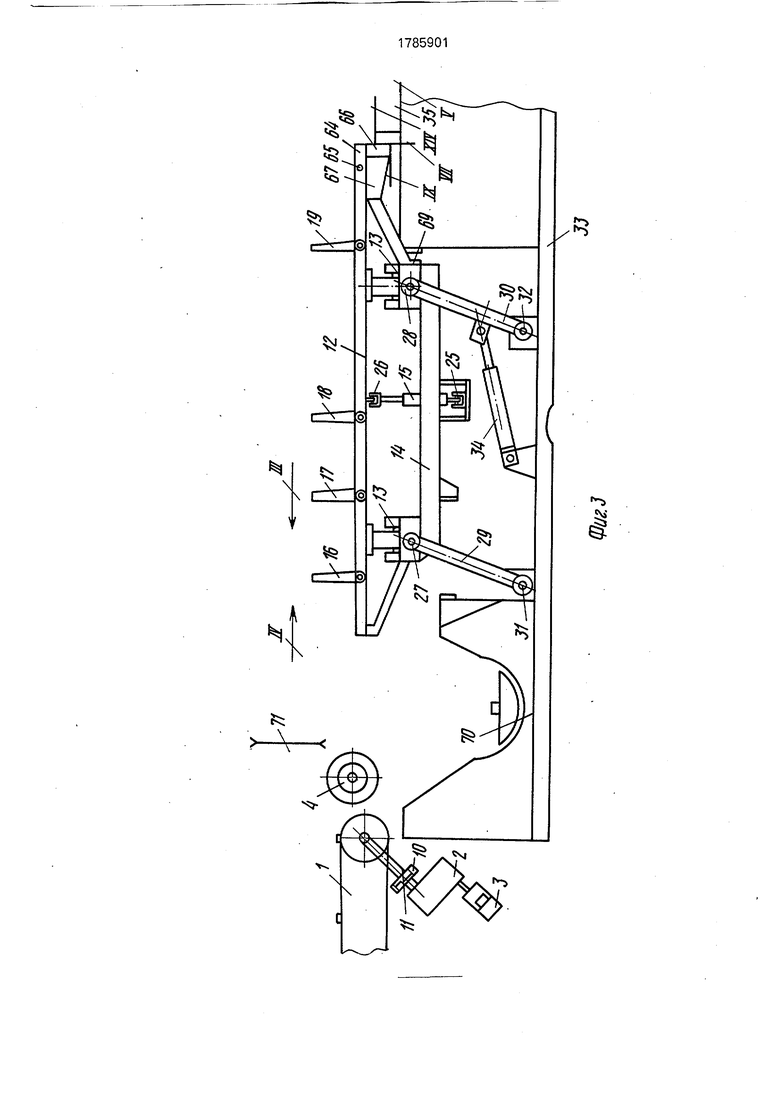
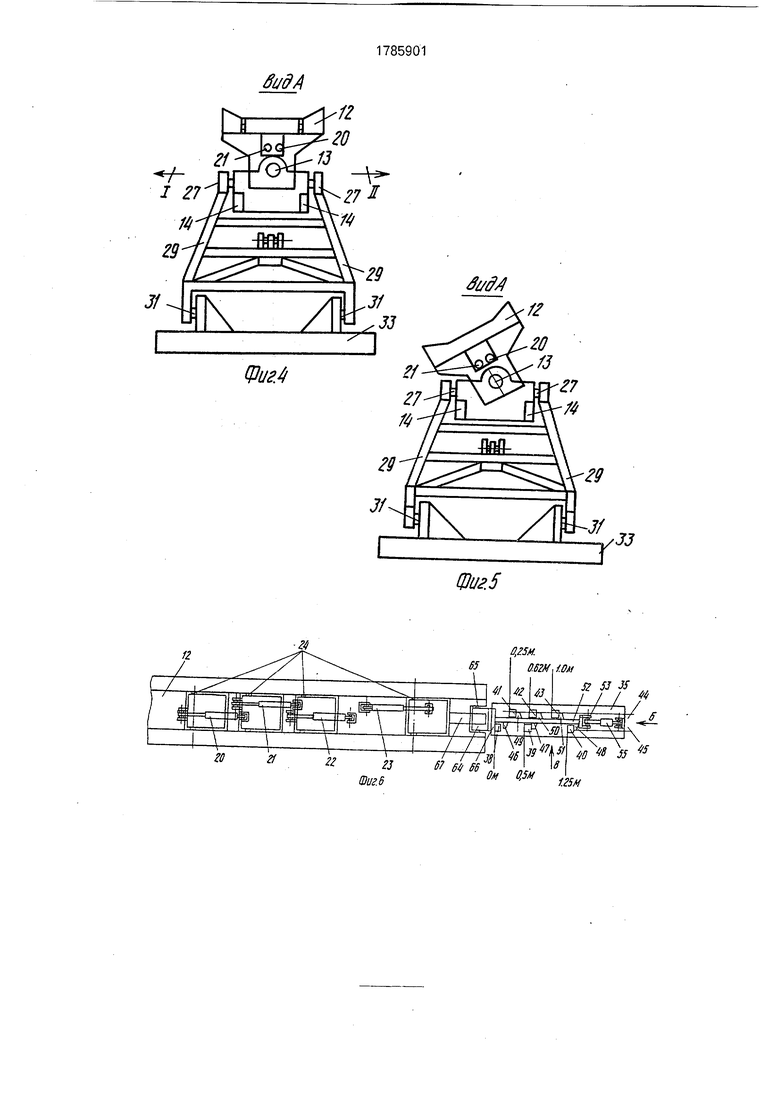
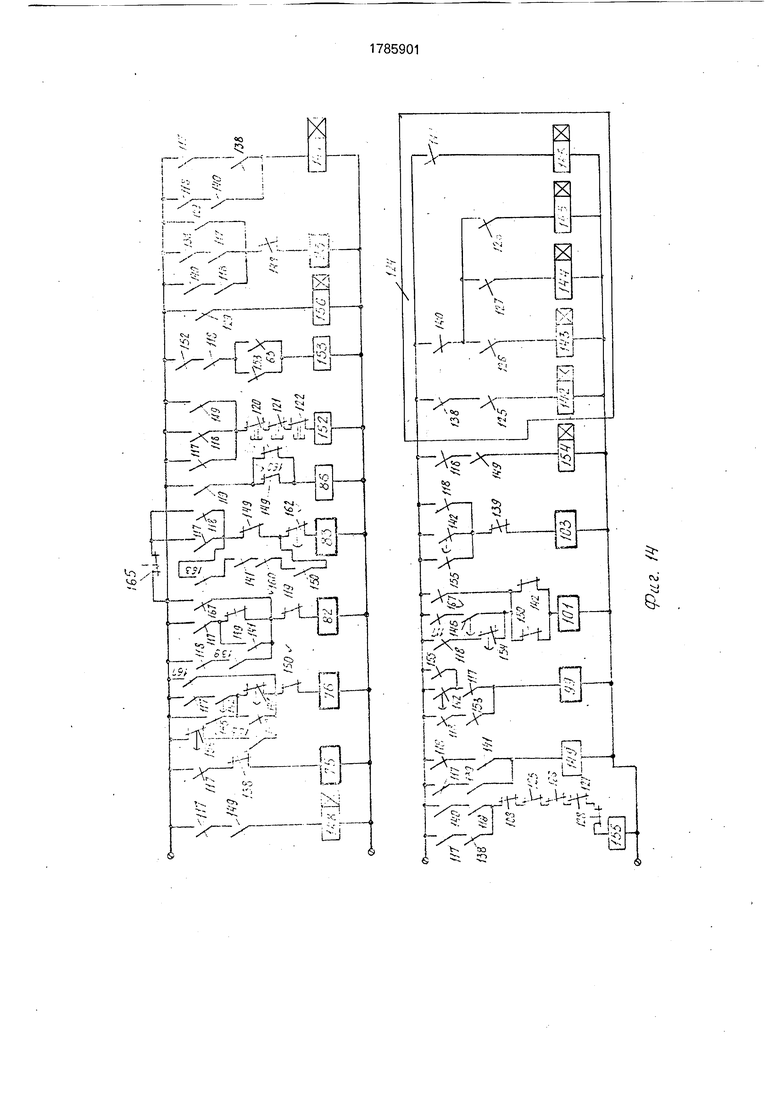
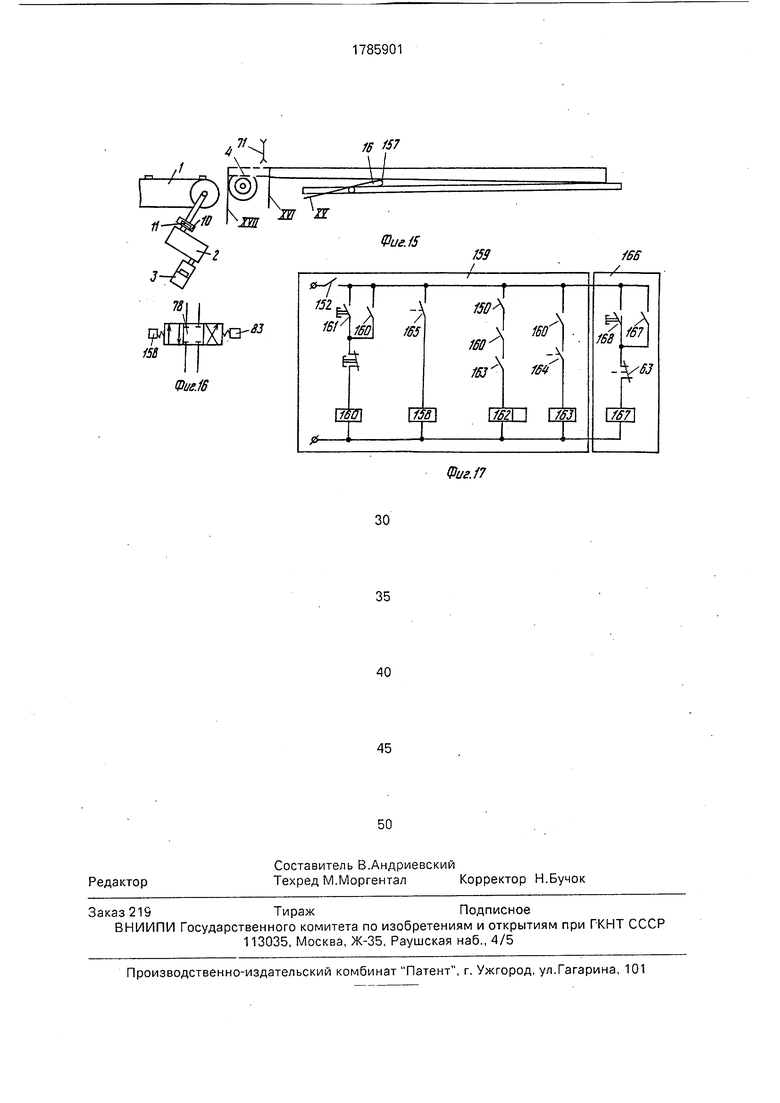
На фиг. 1-3 показаны виды сбоку устройства с приемным столом, находящимся в исходном, среднем и крайнем положениях соответственно; на фиг.4 и 5 - вид А на фиг.2 при горизонтальном и наклонном положениях лотка приемного стола устройства; на фиг.6 - вид сверху лотка приемного стола и коробчатой рамы с основными упорами; на фиг.7 и 8 - вид Б на фиг.6; на фиг.9 вид В на фиг.6; на фиг.9 вид В на фиг.6; на фиг.10 и 11 - гидросистема устройства; на фиг.12 - схема подключения электродвигателя привода подающего конвейера; на фиг.13 и 14. - электросхема управления устройством; на фиг.15 - схема возврата неправильно отпиленных сортиментов; на фиг.16 - трехпози- ционный золотник, используемый для возврата неправильно отпиленных сортиментов; на фиг.17 - дополнительная электросхема.
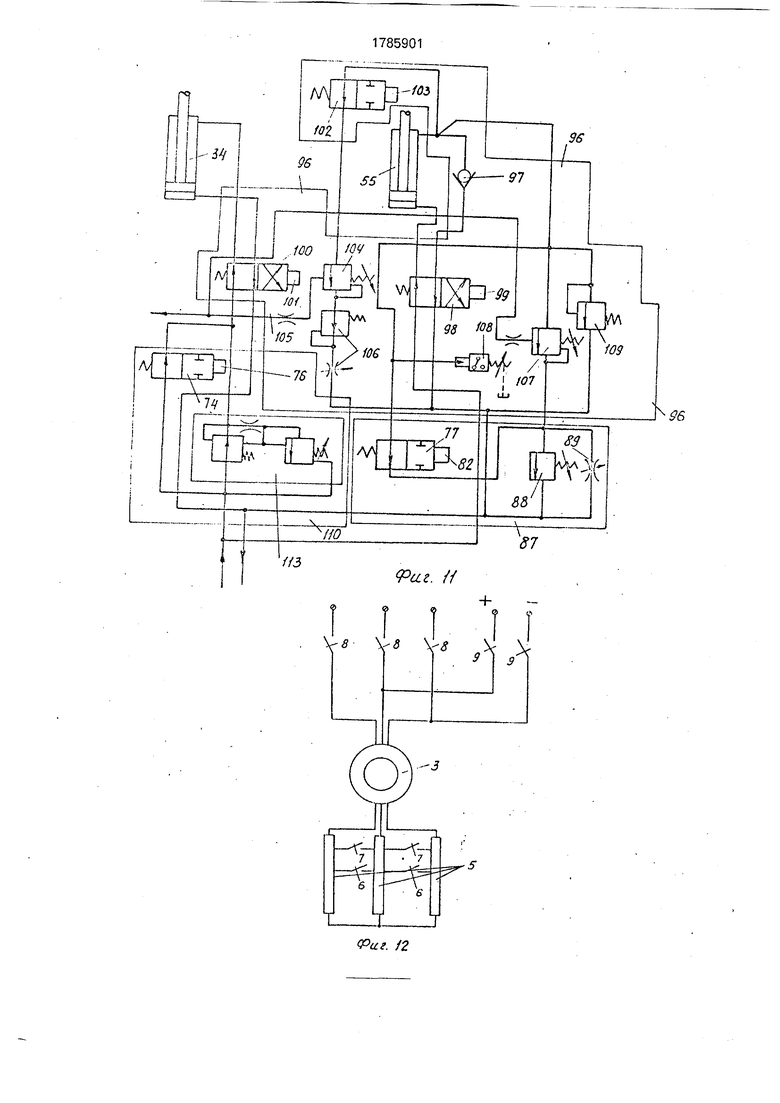
Устройство для отмера длин сортиментов при раскряжевке хлыстов содержит подающий цепной конвейер 1 с электроприводом, включающем в себя редуктор 2 и электродвигатель 3 и центрирующий ролик 4. При этом электродвигатель 3 имеет узел уменьшения его двигательного момента, содержащий сопротивления 5 в роторной цепи и шунтирующие их пускатели 6 и 7. В свою очередь, к трехфазной сети
VI 00
ел о о
этот двигатель подсоединяется пускателем 8 и к цепи постоянного тока - пускателем 9. При этом привод снабжен механическим тормозом 10 с приводом от гидроцилиндра 11. Приемный стол содержит лоток 12, шар- ниром 13 закрепленный на раме 14, выполненный поворотным в поперечной вертикальной плоскости в направлениях I и II от гидроцилиндра 15. На лотке установлены поворотные упоры 16-19 в направлениях против движения хлыстов и обратно III и IV под действием гидроцилиндров 20-23, закрепленные шарниром 24 на лотке 12, т.е. выполненные с возможностью возвратно- поступательных перемещений относитель- но лотка 12. При этом гидроцилиндр 15 поворота лотка 12 шарниром 25 закреплен на раме 14 и шарниром 26 соединен с лотком 12, а рама 14 лотка шарнирами 27 и 28 закреплена на рычагах 29 и 30, которые шарнирами 31 и 32 закреплены на основании 33 устройства. Рычаги 30 шарнирно соединены с гидроцилиндром 34. Поэтому под его действием лоток 12 выполнен с возможностью возвратно-поступательных переме- щений в направлениях III и IV совместно с упорами 16-19.
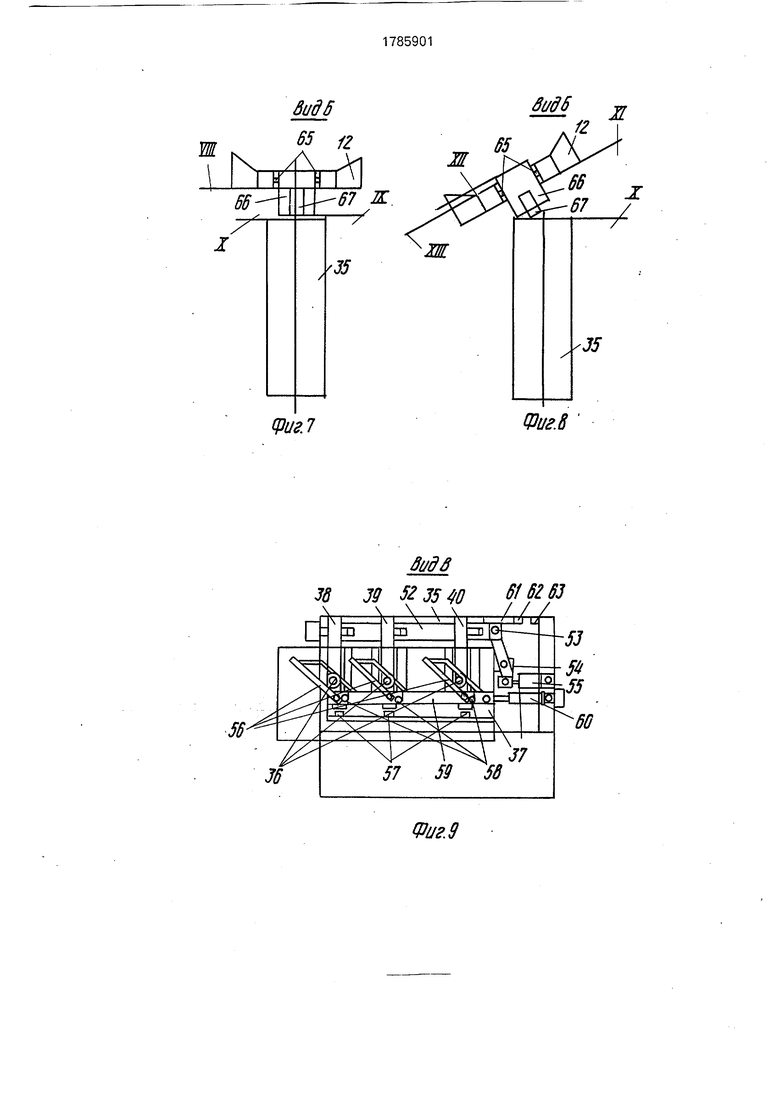
Устройство снабжено узлом позиционирования лотка 12 приемного стола и его амортизации. Этот узел может иметь раз- личные конструкции. Здесь в качестве примера показана конструкция этого узла, имеющая много общего с некоторыми механизмами приемного стола раскряжевочной установки ЛО-15С (А), но имеющего совер- шенно другое функциональное назначение. Он содержит коробчатую раму 35 с шарнирно 36 закрепленными на основании 37 рычагами-фиксаторами 38-43 лотка 12, условно установленных, например, соответ- ственно на отметках 0; 0,25; 0,5; 0,62; 1; 1,25 м для позиционирования лотка 12. Фиксаторы лотка 12 могут устанавливаться в шахматном порядке в несколько рядов, здесь, например, показана их установка в два ряда 44 и 45. Эти фиксаторы кинематически соединены с выступами 46-51 тяги 52, которая шарнирно 53 соединена с вспомогательным рычагом 54, соединенным с гидроцилиндром 55 их возвратно-поступательных пере- мещений, например, через ускоряющую передачу.
Рычаги-фиксаторы кинематически соединены с механизмом 56 их подъема и опускания из исходного V в верхнее VI положения (показано для первого фиксатора), содержащим магниты 57, установленные симметрично относительно тяги 52, запирающие поворотные вспомогательные рычаги 58 одного из тех рычагов-фиксаторов, который необходимо поднять в верхнее положение. Поэтому при перемещении шины 59 этого механизма, которые здесь также установлены симметрично, относительно тяги 52 под действием гидроцилиндра 60 две шины 59, перемещаясь вправо, поднимают оси 36 скользуна того рычага-фиксатора, у которого был включен соответствующий магнит 57. При этом тяга 52 механизма возвратно-поступательных перемещений рычагов-фиксаторов имеет воздействующий элемент 61 для включения бесконтактных датчиков 62 и 63 начала перемещения и крайнего положения лотка 12.
Фиксаторы 38-43 в их верхнем положении выполнены взаимодействующими с лот- ком 12 приемного стола через вспомогательный упор 64, шарнирно 65 размещенный на дальней от механизма подачи консоли лотка 12, выполненный в плоскости VII его взаимодействия с фиксаторами Г-об- разным, т.е. с выступом 66, опирающийся в горизонтальном положении на ребро 67 же- сткости. В свою очередь,.при нахождении фиксаторов в исходном положении V лоток 12 с дополнительным упором 64 свободно перемещается над ними. Поэтому в горизонтальном положении VIII Г-образный выступ 66 вспомогательного упора находится на уровне IX, т.е. выше уровня X коробчатой рамы. В повернутом положении XI лотка 12 вспомогательный упор 66 взаимодействует с коробчатой рамой и отклоняется в положение XII выше уровня XIII лотка.
В исходном положении (фиг.1) лоток 12 дополнительно фиксируется амортизаторами 68, а в крайнем положении амортизаторами 69. Под передней консолью лотка 12 размещен поперечный конвейер 70 для перемещения кусковых отходов и короткомер- ных сортиментов, пильный станок 71 и шарнир 72 крепления гидроцилиндра 34.
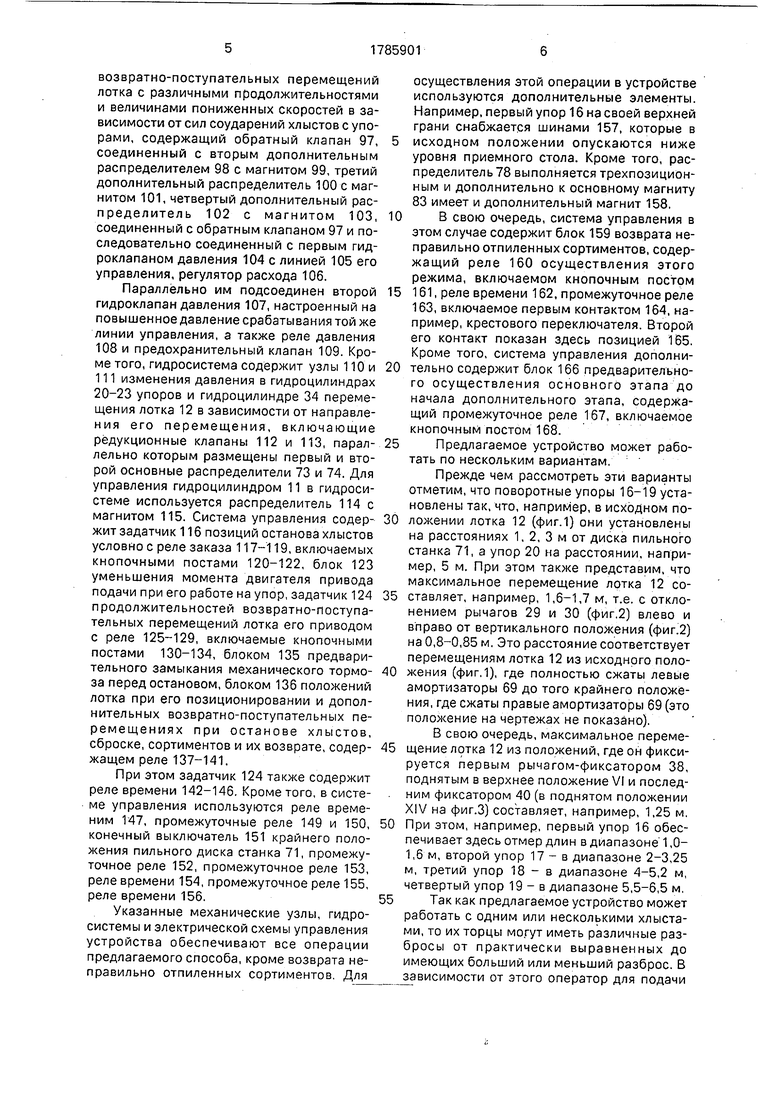
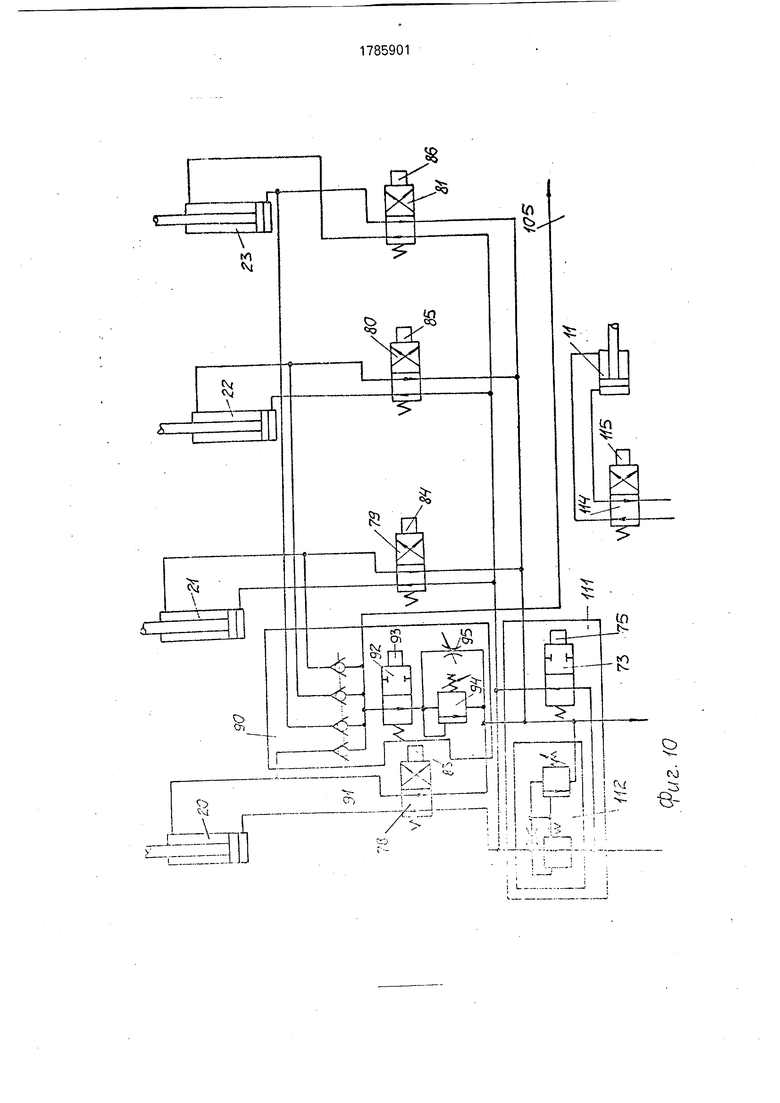
Гидросистема устройства содержит основные первый 73 и второй 74 распределители с магнитами 75 и 76, третий 77 и последующие основные 78-81 распределители с магнитами 82-86. Кроме того, гидросистема содержит узел 87 амортизации лотка с предохранительным клапаном 88, дросселем 89, которые соединены с третьим основным .распределителем 77.
При этом согласно изобретению гидросистема содержит узел 90 амортизации упо-. ров с обратными клапанами 91, первый ополнительный распределитель 92 с магнитами 93, а также параллельно размещенные предохранительный клапан 94 и дроссель 95, подсоединенные к гидроцилиндрам 20-23, а также узел 96 позициони- рования лотка и дополнительных
возвратно-поступательных перемещений лотка с различными продолжительностями и величинами пониженных скоростей в зависимости от сил соударений хлыстов с упорами, содержащий обратный клапан 97, соединенный с вторым дополнительным распределителем 98 с магнитом 99, третий дополнительный распределитель 100 с магнитом 101, четвертый дополнительный распределитель 102 с магнитом 103, соединенный с обратным клапаном 97 и последовательно соединенный с первым гидроклапаном давления 104 с линией 105 его управления, регулятор расхода 106.
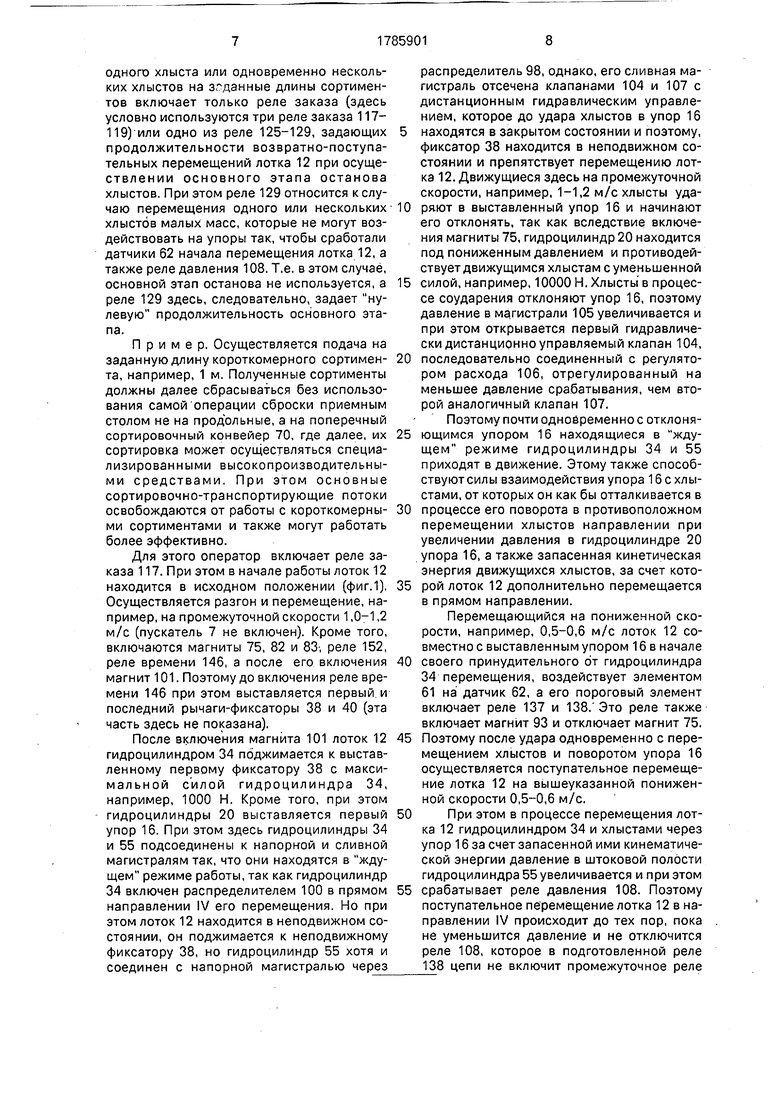
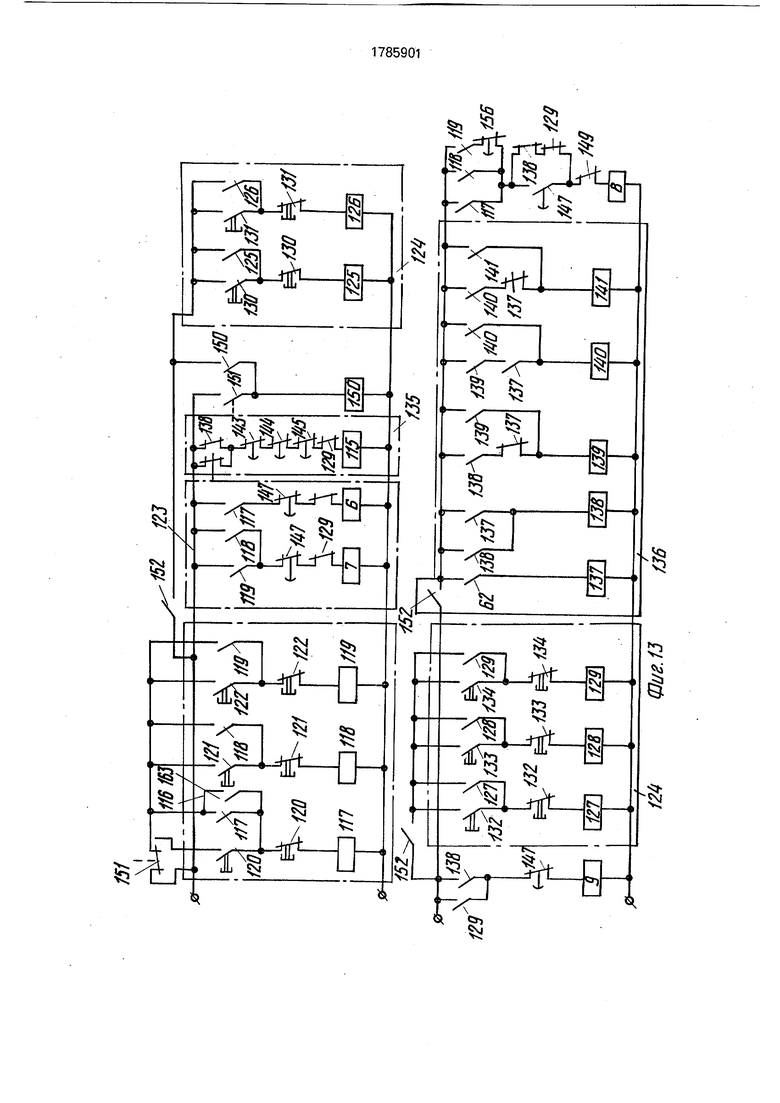
Параллельно им подсоединен второй гидроклапан давления 107, настроенный на повышенное давление срабатывания той же линии управления, а также реле давления 108 и предохранительный клапан 109. Кроме того, гидросистема содержит узлы 110 и 111 изменения давления в гидроцилиндрах 20-23 упоров и гидроцилиндре 34 перемещения лотка 12 в зависимости от направления его перемещения, включающие редукционные клапаны 112 и 113, параллельно которым размещены первый и второй основные распределители 73 и 74. Для управления гидроцилиндром 11 в гидросистеме используется распределитель 114 с магнитом 115. Система управления содержит задатчик 116 позиций останова хлыстов условное реле заказа 117-119, включаемых кнопочными постами 120-122, блок 123 уменьшения момента двигателя привода подачи при его работе на упор, задатчик 124 продолжительностей возвратно-поступательных перемещений лотка его приводом с реле 125-129, включаемые кнопочными постами 130-134, блоком 135 предварительного замыкания механического тормоза перед остановом, блоком 136 положений лотка при его позиционировании и дополнительных возвратно-поступательных перемещениях при останове хлыстов, сброске, сортиментов и их возврате, содержащем реле 137-141.
При этом задатчик 124 также содержит реле времени 142-146. Кроме того, в системе управления используются реле временим 147, промежуточные реле 149 и 150, конечный выключатель 151 крайнего положения пильного диска станка 71, промежуточное реле 152, промежуточное реле 153, реле времени 154, промежуточное реле 155, реле времени 156.
Указанные механические узлы, гидросистемы и электрической схемы управления устройства обеспечивают все операции предлагаемого способа, кроме возврата неправильно отпиленных сортиментов. Для
осуществления этой операции в устройстве используются дополнительные элементы. Например, первый упор 16 на своей верхней грани снабжается шинами 157, которые в
исходном положении опускаются ниже уровня приемного стола. Кроме того, распределитель 78 выполняется трехпозицион- ным и дополнительно к основному магниту 83 имеет и дополнительный магнит 158.
0 В свою очередь, система управления в этом случае содержит блок 159 возврата неправильно отпиленных сортиментов, содержащий реле 160 осуществления этого режима, включаемом кнопочным постом
5 161, реле времени 162, промежуточное реле 163, включаемое первым контактом 164, например, крестового переключателя. Второй его контакт показан здесь позицией 165. Кроме того, система управления дополни0 тельно содержит блок 166 предварительного осуществления основного этапа до начала дополнительного этапа, содержащий промежуточное реле 167, включаемое кнопочным постом 168.
5 Предлагаемое устройство может работать по нескольким вариантам. :
Прежде чем рассмотреть эти варианты отметим, что поворотные упоры 16-19 установлены так, что, например, в исходном по0 ложении лотка 12 (фиг.1) они установлены на расстояниях 1, 2, 3 м от диска пильного станка 71, а упор 20 на расстоянии, например, 5 м. При этом также представим, что максимальное перемещение лотка 12 со5 ставляет, например, 1,6-1,7 м, т.е. с отклонением рычагов 29 и 30 (фиг.2) влево и вправо от вертикального положения (фиг.2) на 0,8-0,85 м. Это расстояние соответствует перемещениям лотка 12 из исходного поло0 жения (фиг.1), где полностью сжаты левые амортизаторы 69 до того крайнего положения, где сжаты правые амортизаторы 69 (это положение на чертежах не показано).
В свою очередь, максимальное переме5 щение лотка 12 из положений, где он фиксируется первым рычагом-фиксатором 38, поднятым в верхнее положение VI и послед- . ним фиксатором 40 (в поднятом положении XIV на фиг.З) составляет, например, 1,25 м.
0 При этом, например, первый упор 16 обеспечивает здесь отмер длин в диапазоне 1,0- 1,6 м, второй упор 17 - в диапазоне 2-3,25 м, третий упор 18 - в диапазоне 4-5,2 м, четвертый упор 19 - в диапазоне 5,5-6,5 м.
5 Так как предлагаемое устройство может работать с одним или несколькими хлыстами, то их торцы могут иметь различные разбросы от практически выравненных до имеющих больший или меньший разброс. В зависимости от этого оператор для подачи
одного хлыста или одновременно нескольких хлыстов на заданные длины сортиментов включает только реле заказа (здесь условно используются три реле заказа 117- 119) или одно из реле 125-129, задающих продолжительности возвратно-поступательных перемещений лотка 12 при осуществлении основного этапа останова хлыстов. При этом реле 129 относится к случаю перемещения одного или нескольких хлыстов малых масс, которые не могут воздействовать на упоры так, чтобы сработали датчики 62 начала перемещения лотка 12, а также реле давления 108. Т.е. в этом случае, основной этап останова не используется, а реле 129 здесь, следовательно, задает нулевую продолжительность основного этапа.
Пример. Осуществляется подача на заданную длину короткомерного сортимента, например, 1 м. Полученные сортименты должны далее сбрасываться без использования самой операции сброски приемным столом не на продольные, а на поперечный сортировочный конвейер 70, где далее, их сортировка может осуществляться специализированными высокопроизводительными средствами. При этом основные сортировочно-транспортирующие потоки освобождаются от работы с короткомерны- ми сортиментами и также могут работать более эффективно.
Для этого оператор включает реле заказа 117. При этом в начале работы лоток 12 находится в исходном положении (фиг.1). Осуществляется разгон и перемещение, например, на промежуточной скорости 1,0-1,2 м/с (пускатель 7 не включен). Кроме того, включаются магниты 75, 82 и 83, реле 152, реле времени 146, а после его включения магнит 101. Поэтому до включения реле времени 146 при этом выставляется первый, и последний рычаги-фиксаторы 38 и 40 (эта часть здесь не показана).
После включения магнита 101 лоток 12 гидроцилиндром 34 поджимается к выставленному первому фиксатору 38 с максимальной силой гидроцилиндра 34, например, 1000 Н. Кроме того, при этом гидроцилиндры 20 выставляется первый упор 16. При этом здесь гидроцилиндры 34 и 55 подсоединены к напорной и сливной магистралям так, что они находятся в ждущем режиме работы, так как гидроцилиндр 34 включен распределителем 100 в прямом направлении IV его перемещения. Но при этом лоток 12 находится в неподвижном состоянии, он поджимается к неподвижному фиксатору 38, но гидроцилиндр 55 хотя и соединен с напорной магистралью через
распределитель 98, однако, его сливная магистраль отсечена клапанами 104 и 107 с дистанционным гидравлическим управлением, которое до удара хлыстов в упор 16
находятся в закрытом состоянии и поэтому, фиксатор 38 находится в неподвижном состоянии и препятствует перемещению лотка 12. Движущиеся здесь на промежуточной скорости, например, 1-1,2 м/с хлысты уда0 ряют в выставленный упор 16 и начинают его отклонять, так как вследствие включения магниты 75, гидроцилиндр 20 находится под пониженным давлением и противодействует движущимся хлыстам с уменьшенной
5 силой, например, 10000 Н. Хлысты в процессе соударения отклоняют упор 16, поэтому давление в магистрали 105 увеличивается и при этом открывается первый гидравлически дистанционно управляемый клапан 104,
0 последовательно соединенный с регулятором расхода 106, отрегулированный на меньшее давление срабатывания, чем второй аналогичный клапан 107.
Поэтому почти одновременно с отклоня5 ющимся упором 16 находящиеся в ждущем режиме гидроцилиндры 34 и 55 приходят в движение. Этому также способствуют силы взаимодействия упора 16 с хлыстами, от которых он как бы отталкивается в
0 процессе его поворота в противоположном перемещении хлыстов направлении при увеличении давления в гидроцилиндре 20 упора 16, а также запасенная кинетическая энергия движущихся хлыстов, за счет кото5 рой лоток 12 дополнительно перемещается в прямом направлении.
Перемещающийся на пониженной скорости, например, 0,5-0,6 м/с лоток 12 совместно с выставленным упором 16 в начале
0 своего принудительного от гидроцилиндра 34 перемещения, воздействует элементом 61 на датчик 62, а его пороговый элемент включает реле 137 и 138. Это реле также включает магнит 93 и отключает магнит 75.
5 Поэтому после удара одновременно с перемещением хлыстов и поворотом упора 16 осуществляется поступательное перемещение лотка 12 на вышеуказанной пониженной скорости 0,5-0,6 м/с.
0 При этом в процессе перемещения лотка 12 гидроцилиндром 34 и хлыстами через упор 16 за счет запасенной ими кинематической энергии давление в штоковой полости гидроцилиндра 55 увеличивается и при этом
5 срабатывает реле давления 108. Поэтому поступательное перемещение лотка 12 в направлении IV происходит до тех пор, пока не уменьшится давление и не отключится реле 108, которое в подготовленной реле 138 цепи не включит промежуточное реле
Поэтому через выставленный здесь рычаг-фиксатор 38 гидроцилиндр 55 перемещает лоток 12 в обратном направлении III до того, как он не возвратится в исходное положение, где срабатывает реле 139, после отключения датчика 62. Лоток 12 гидроцилиндром 34 в процессе этого перемещения поджимается к фиксатору 38 через вспомогательный упор 64, а путь этого перемещения зависит от запасенной кинематической энергии движущейся системы, так как реле давления 108 отключается только тогда, когда эта энергия уменьшается до заданной этим реле величины, а поэтому может быть дана команда на возврат лотка 12 в исходное положение фиксатора 38.
При этом в процессе поступательного перемещения лотка 12 в направлении IV существенно уменьшаются силы взаимодействия хлыстов с выставленным упором за счет увеличения тормозного пути и его регулирования реле 108 в зависимости от величины запасенной кинетической энергии движущимися хлыстами. При этом здесь путь торможения состоит из 2 сопоставляющих: отклонения поворотного упора из вертикального положения, составляющего в максимуме 0,2-0,25 м, и расстоянии поступательных перемещений приемного стола, представляющих различные величины в зависимости от команды реле 108, в максимуме равного, например 0,4-0,45 м.
Поэтому максимальный тормозной путь здесь может составлять при необходимости вместо 0,08 м у прототипа до 0,7 м в предлагаемом устройстве, а с учетом реверса лотка в максимуме 1,4 м. Кроме того, здесь при использовании основного этапа останова, значительно уменьшаются силы соударений хлыстов с выставленным упором и за счет уменьшения при этом скорости их соударений. Например, при скорости хлыстов здесь 1,0-1,2 м/с и поступательной скорости перемещения лотка 0,5-0,6 м/с сила удара только за счет этого уменьшается в . г(1,0)м/с . (1,2 м/с)2 ,
(1,0)м/с -0,5м/с)2 в 4 раза.
(1,2 м/с -0,6м/сУ
По команде реле 138 также отключается пускатель 8 и включается пускатель 9 динамического торможения и реле времени 147, задающее продолжительность этого торможения, и поэтому после снижения скорости двигателя 3 по команде реле 147 отключается пускатель 9 и вновь включается пускатель 8, но при этом, момент двигателя 3 уменьшается в 3-4 раза за счет отключения пуска0 телей 6 и 7.
В процессе обратного перемещения лотка 12 и хлыстов упоров 16 в направлении III они поджимаются к упору, так как двигатель 3 остается включенным. Кроме того, по
5 команде реле времени 147 отключается магнит 115 и механический тормоз 11 замыкается. Поэтому когда хлыст возвращается в заданную позицию их останова, то механический тормоз 10 замыкается, а хлысты дви0 гателем 3 продолжают поджиматься к выставленному упору. При этом срабатывает реле 139 и процесс точного останова хлыстов заканчивается. Реле 139 включает реле останова 149, которое отключает пускатель
5 8, а также магниты 82 и 83.
Осуществляется уборка выставленного упора 16 и подготовка узла 87 амортизации лотка 12. Кроме того, дается команда одному из магнитов 57 на уборку выставленного
0 рычага-фиксатора 38 в исходное положение. При этом реле 149 здесь включает реле времени 147, а последнее отключает магнит 76 а также дает команду на надвигание пильного диска на хлысты (эта часть схемы
5 здесь не показана). После уборки рычага- фиксатора 38 в процессе надвигания пильного диска 71 на хлысты лоток 12 на скорости, например, 0,7-0,8 м/с перемещается до остающегося выставленным послед0 него рычага-фиксатора 40 и воздействует на него.
Лоток 12 соударяется с рычагом-фиксатором 40, амортизируется узлом 87 и, откло- няясь, включает датчик 62, а после
5 окончания соударения и остановки включаются реле 140 и 141. При этом, реле 140 вновь включает магнит 76 и лоток 12 поджимается к фиксатору 40 с уменьшенной силой. В свою очередь, реле 141 включает
0 магнит 82 и подготавливает цепь отклонения магнита 101.
Лоток 12 находится в положении, показанном на фиг.З, где он полностью открывает поперечный конвейер 70, остается в этом
5 положении до окончания пропиливания диском 71 хлыстов. После пропиливания хлыстов пильный диск 71 воздействует на датчик 151 его крайнего положения, который включает промежуточное реле 150. Отпиленный короткомерный сортимент
падает на поперечный конвейер 70 без осуществления операции сброски и одновременно промежуточное реле 150 окончательно отключает магниты 76 и 101 и лоток 21 со скоростью 0,5-0,6 м/с перемещается в направлении III и перед возвратом в исходное положение, показанное на фиг.1, приемный лоток вначале амортизируется гидроцилиндром 34, а затем, в необходимых случаях, амортизатором 68 и вновь занимает исходное положение (фиг.1).
При срабатывании датчика выключателя 151 снимается часть блокировок, а остальные блокировки снимаются при очередном заказе, когда отключается реле 152 окончания цикла работы. При этом, схема подготавливается к дальнейшему использованию. Данный вариант подачи хлыстов осуществляется применительно к хлыстам, торцы которых имели относительно небольшой разброс и поэтому, выравнивались в процессе их соударения с упором.
Формула изобретения
гидроцилиндра, на котором установлены поворотные упоры, систему управления с задатчиком позиций останова хлыстов и гидросистему с распределителями, о т л и чающееся тем, что, с целью повышения производительности и точности отмёра, оно снабжено узлом позиционирования лотка и его амортизации при перемещениях в заданные позиции, рама лотка шарнирно за0 креплена на рычагах и выполнена с возможностью возвратно-поступательных перемещений под действием гидроцилиндра перемещения лотка и при этом, упоры выполнены поворотными навстречу движе5 нию хлыстов и обратн о, а узел позиционирования лотка размещен ниже уровня лотка и выполнен с возможностью осуществления разрыва и восстановления кинематической связи с лотком, система управления содер0 жит задатчик продолжительностей возвратно-поступательных перемещений лотка его приводом, блок положений лотка при его позиционировании и дополнительных воз- вратно-поступательных перемещениях при
5 останове хлыстов и датчики исходного крайнего положений лотка, а гидросистема содержит узел амортизации позиционирования и дополнительных возвратно-поступательных перемещений лотка с различными про0 должительностями и величинами пониженных скоростей в зависимости от сил соударений хлыстов с упорами, узел . амортизации упоров и узел изменения давления в гидроцилиндрах упоров и переме5 щения лотка в зависимости от направления включения его привода.
4, Устройство по п.З, отличающее- с я тем, что узел позиционирования лотка и его амортизации содержит коробчатую раму
0 с шарнирно закрепленными на ее основании рычагами-фиксаторами лотка, снабженными механизмами их подъема и опускания из исходного в верхнее положение и возвратно-поступательных перемещений с гидроци5 линдрами и выполненных с возможностями взаимодействия фиксаторов в их верхних положениях с лотком и свободного перемещения над фиксаторами в их исходном положении,
0 5. Устройство по п.З, отличающее- с я тем, что лоток приемного стола в горизонтальном положении выполнен взаимодействующим с фиксаторами узла ее позиционирования через вспомогательный
5 упор, шарнирно размещенный на дальней от механизма подачи консоли лотка, который выполнен в плоскости его взаимодействия с фиксаторами Г-образным, а в наклонном положении подъемным при вза- имодействии с коробчатой рамой.
взаимодействующих с выступами тяги, шар- нирно соединенной с гидроцилиндром воз- вратно-п осту па тельных перемещений фиксаторов.
ffi/дА
Фиг.5
Фи г. 7
Фиг.8
Фи г. 9
.100
7
//О
f/3
/ov
36
87
Фаг. Н
(Риг. /2
- .u&« r
i I- T «M L i
шфсюCEO oo цз CP
;i i I 1 i
/65
i j--з-. s 3 ,
H9
R
I
ISO
-W/Л Г -Ч А- ч1
- .u&« r
X-« -I Ni,;. tt N -
I v1 | Л:Уx|
Y H V H 7
1
П.1. J /зв ™ , I. 1
vrn
V/H «
- T «M L i
oo цз CP
г. 14
| УСТРОЙСТВО для ОТМЕРА ДЛИН СОРТИМЕНТОВ | 0 |
|
SU341640A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
