Изобретение относится к космической технике и может быть использовано на борту космического корабля для выноса за его преде лы на заданное расстояние объектов (солнечных батарей, исследовательской аппаратуры и т.п.), а также как трансформируемая строительная конструкция (ферма) при монтаже крупногабаритных космических обьектов.
Известен раздвижной подъемник, содержащий платформу с приводом, систему силовых элементов, трансформируемых в призму несущей конструкции, ребра которой образованы лонжеронами, соединенными поперечными и диагональными элементами, так, что каждая ее грань образована соединенными последовательно прямоугольниками, стороны которых состоят из жестких или гибких лонжеронов.
Недостатком известного устройства является его низкая, надежность вследствие того, что усилие разворачивания прикладывается только к одному из диагональных элементов.
Наиболее близким по технической сущности и достигаемому результату является раздвижной подъемник, содержащий платформу с приводом, систему силовых элементов, трансформируемых в призму несущей конструкции, ребра которой образованы замкнутыми рамками с помощью замков и диагональных элементов, расположенных в плоскостях граней призмы.
Такая конструкция не обеспечивает синхронности разворачивания ребер из упругого трубчатого профиля вследствие возможности проскальзывания лент на барабане, приводящего к деформации призмы.
Целью изобретения является повышение надежности за счет увеличения жесткости конструкции.
Поставленная цель достигается тем, что раздвижной подъемник, содержащий платформу с приводом, систему силовых элементов, трансформируемых в призму несущей конструкции, ребра которой образованы замкнутыми упругими профилями, связанными между собой параллельными рамками с помощью замков согласно изобретению снабжен по меньшей мере, одной кинематически связанной с приводом многозвенной рейкой, состоящей из зубчатых звеньев равной длины, сочлененных между собой шарнирами, нечетные из которых неподвижно соединены с замками с внутренней стороны рамок, а четные - снабжены фиксаторами развернутого положения звеньев рейки, при этом, на платформе установлено направляющее устройство, кинематически связанное с рейкой. Направляющее устройство выполнено в виде зубчатых колес и роликов.
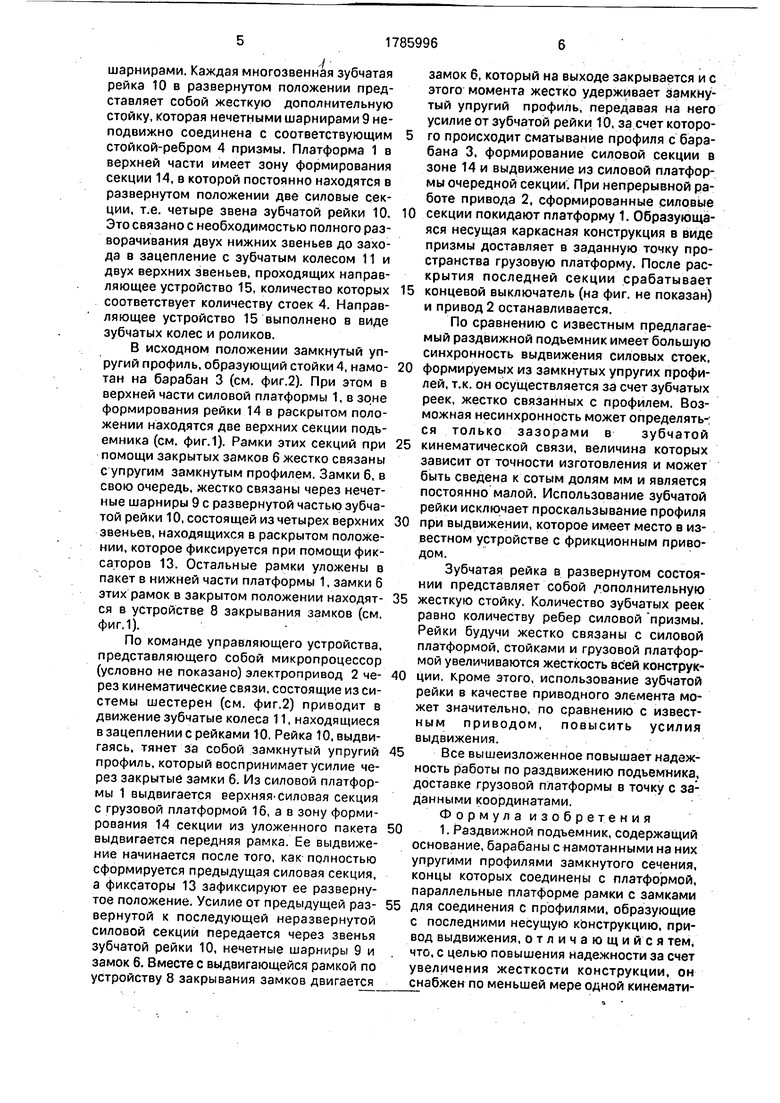
На фиг.1 схематически представлен заявляемый раздвижной подъемник; на фиг.2 - схема кинематической связи привода с упругим профилем; на фиг.З - разрез А-А на фиг.1.-
Раздвижной подъемник (фиг. 1,2) пред0 ставляет собой платформу 1, на которой жестко закреплены электропривод 2 и барабаны 3. На каждый барабан 3 намотана двойная лента, края которой неподвижно скреплены, например, сваркой по всей ее
5 длине. Лента трансформируется в процессе разворачивания в замкнутый упругий профиль трубчатого сечения, образующий стойки ребра 4 призмы несущей конструкции (фермы). В сложенном состоянии в платформе 1
0 размещены многоугольные рамки 5, имеющие по углам замки 6.
Каждая рамка соединена с соседней шестью телескопическими тягами 7, которые в сложенном состоянии.размещены в плоско5 сти рамки 5. Устройство 8 для закрывания замков выполнено в виде вертикальной полой стойки, внутрь которой укладывается пакет замков 6. Замок 6 имеет подвижный хвост с кулачком, движущийся по фигурному
0 пазу в устройстве 8, благодаря чему при выходе из устройства 8, замок закрывается и жестко связывает рамку 5 с профилем ребра А. Замки б неподвижно с внутренней стороны рамок 5 соединены с нечетными
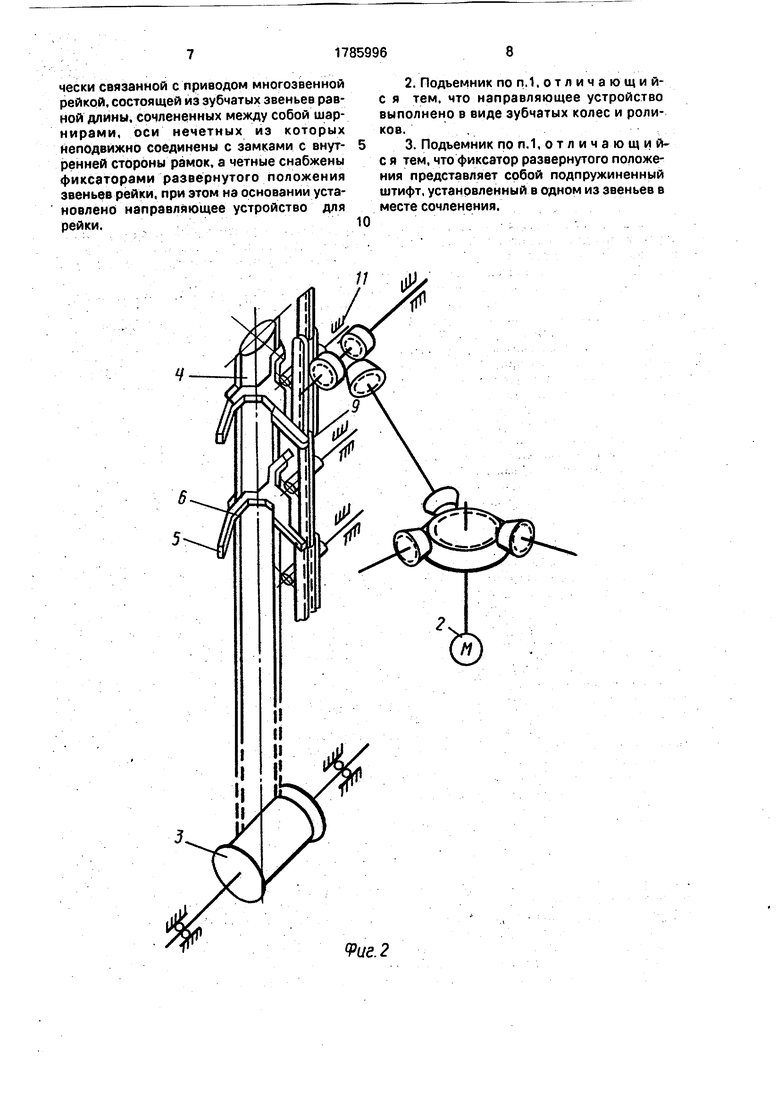
5 шарнирами 9 многозвенной зубчатой рейки 10. Рейка 10 кинематически, при помощи зубчатого колеса 11, соединена с приводом 2 (фиг.2). Четные шарниры 12 рейки 10 снабжены фиксаторами 13 развернутого поло0 жения (фиг.З). Фиксатор 13 развернутого положения представляет собой подпружиненный штифт, установленный в сочленении зубчатых звеньев. В развернутом состоянии система силовых элементов в со5 ставе стоек 4, многоугольных рамок 5, замков 6, телескопических тяг 7, многозвенных реек 10, фиксаторов 13 образует прямую призму, в описываемом варианте - трехгранную. Ребра призмы образованы стойка0 ми 4 из замкнутого упругого профиля. Рамки 5 расположены параллельно друг другу и перпендикулярно стойкам 4, образуя одинаковые по длине силовые секции, закрепленные на стойках 4 при помощи замков 6
.5 Количество многозвенных зубчатых реек 10 равно количеству ребер призмы, в описываемом варианте их три (фиг.2), Каждая рейка 10 состоит из зубчатых звеньев равной длины, которые подвижно соединены между собой нечетными 9 и четными 12
4шарнирами. Каждая многозвенная зубчатая рейка 10 в развернутом положении представляет собой жесткую дополнительную стойку, которая нечетными шарнирами 9 неподвижно соединена с соответствующим стойкой-ребром 4 призмы. Платформа 1 в верхней части имеет зону формирования секции 14, в которой постоянно находятся в развернутом положении две силовые секции, т.е. четыре звена зубчатой рейки 10. Это связано с необходимостью полного раз- ворачивания двух нижних звеньев до захода в зацепление с зубчатым колесом 11 и двух верхних звеньев, проходящих направляющее устройство 15, количество которых соответствует количеству стоек 4. Направляющее устройство 15 выполнено в виде зубчатых колес и роликов.
В исходном положении замкнутый упругий профиль, образующий стойки 4, намотан на барабан 3 (см. фиг.2). При этом в верхней части силовой платформы 1, в зоне формирования рейки 14 в раскрытом положении находятся две верхних секции подъемника (см, фиг.1). Рамки этих секций при помощи закрытых замков б жестко связаны с упругим замкнутым профилем. Замки 6, в свою очередь, жестко связаны через нечетные шарниры 9 с развернутой частью зубчатой рейки 10, состоящей из четырех верхних звеньев, находящихся в раскрытом положении, которое фиксируется при помощи фиксаторов 13. Остальные рамки уложены в пакет в нижней части платформы 1, замки 6 этих рамок в закрытом положении находятся в устройстве 8 закрывания замков (см. фиг.1).
По команде управляющего устройства, представляющего собой микропроцессор (условно не показано) электропривод 2 через кинематические связи, состоящие из системы шестерен (см. фиг.2) приводит в движение зубчатые колеса 11, находящиеся в зацеплении с рейками 10. Рейка 10, выдвигаясь, тянет за собой замкнутый упругий профиль, который воспринимает усилие через закрытые замки 6. Из силовой платформы 1 выдвигается верхняя-силовая секция с грузовой платформой 16, а в зону формирования 14 секции из уложенного пакета выдвигается передняя рамка. Ее выдвижение начинается после того, как полностью сформируется предыдущая силовая секция, а фиксаторы 13 зафиксируют ее развернутое положение. Усилие от предыдущей развернутой к последующей неразвернутой силовой секций передается через звенья зубчатой рейки 10, нечетные шарниры 9 и замок 6. Вместе с выдвигающейся рамкой по устройству 8 закрывания замков двигается
замок 6, который на выходе закрывается и с этого момента жестко удерживает замкнутый упругий профиль, передавая на него усилие от зубчатой рейки 10, за.счет которо- 5 го происходит сматывание профиля с барабана 3, формирование силовой секции в зоне 14 и выдвижение из силовой платформы очередной секции. При непрерывной работе привода 2, сформированные силовые
0 секции покидают платформу 1. Образующаяся несущая каркасная конструкция в виде призмы доставляет в заданную точку пространства грузовую платформу. После раскрытия последней секции срабатывает
5 концевой выключатель (на фиг. не показан) и привод 2 останавливается.
По сравнению с известным предлагаемый раздвижной подъемник имеет большую синхронность выдвижения силовых стоек,
0 формируемых из замкнутых упругих профилей, т.к. он осуществляется за счет зубчатых реек, жестко связанных с профилем. Возможная несинхронность может определять-; ся только зазорами в зубчатой
5 кинематической связи, величина которых зависит от точности изготовления и может быть сведена к сотым долям мм и является постоянно малой. Использование зубчатой рейки исключает проскальзывание профиля
0 при выдвижении, которое имеет место в известном устройстве с фрикционным приводом.
Зубчатая рейка в развернутом состоянии представляет собой дополнительную
5 жесткую стойку. Количество зубчатых реек равно количеству ребер силовой призмы. Рейки будучи жестко связаны с силовой платформой, стойками и грузовой платформой увеличиваются жесткость вс ей конструк0 Ции. кроме этого, использование зубчатой рейки в качестве приводного элемента может значительно, по сравнению с известным приводом, повысить усилия выдвижения.
5 Все вышеизложенное повышает надежность работы по раздвижению подъемника, доставке грузовой платформы в точку с заданными координатами.
Формула изобретения
01. Раздвижной подъемник, содержащий основание, барабаны с замотанными на них упругими профилями замкнутого сечения, концы которых соединены с платформой, параллельные платформе рамки с замками
5 для соединения с профилями, образующие с последними несущую конструкцию, привод выдвижения, отличающийся тем, что, с целью повышения надежности за счет увеличения жесткости конструкции, он снабжен по меньшей мере одной кинематически связанной с приводом многозвенной рейкой, состоящей из зубчатых звеньев равной длины, сочлененных между собой шар- нирами, оси нечетных из которых неподвижно соединены с замками с внутренней стороны рамок, а четные снабжены фиксаторами развернутого положения звеньев рейки, при этом на основании установлено направляющее устройство для рейки.
0
2. Подъемник по п.1. о т л и ч а ю щ и й- с я тем. что направляющее устройство выполнено в виде зубчатых колес и роликов..
3. Подъемник по п.1, о т л и ч а ю щ и й- с я тем, что фиксатор развернутого положения представляет собой подпружиненный штифт, установленный в одном из звеньев в месте сочленения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСФОРМИРУЕМАЯ КОНСТРУКЦИЯ | 2000 |
|
RU2167789C1 |
| Зевообразующее устройство ткацкого станка с волнообразно подвижным зевом | 1980 |
|
SU973679A1 |
| ТРАНСФОРМИРУЕМЫЙ КУЗОВ ПИМ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2067059C1 |
| КРУПНОГАБАРИТНЫЙ КОСМИЧЕСКИЙ СКЛАДНОЙ РЕФЛЕКТОР | 1996 |
|
RU2101811C1 |
| Массажная кровать | 1989 |
|
SU1708335A1 |
| Подъемник | 1988 |
|
SU1586994A1 |
| Установка для многострунной резки и укладки кирпича на сушильные вагонетки | 1984 |
|
SU1186497A1 |
| Устройство для возведения сооружений методом подращивания | 1982 |
|
SU1102877A1 |
| Исполнительный орган манипулятора | 1987 |
|
SU1426777A1 |
| УСТРОЙСТВО ДЛЯ РАЗВЕРТЫВАНИЯ КОСМИЧЕСКОЙ ЯДЕРНОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 1998 |
|
RU2137684C1 |
Использование: на борту космического корабля для выноса за его пределы на заданное расстояние объектов техники. Сущность изобретения: подъемник содержит основание, барабаны с намотанными на них упругими профилями замкнутого сечения, соединенные между собой параллельными рамками 5с помощью замков 6, по крайней мере одну кинематически связанную с приводом 2 многозвенную рейку 10 из зубчатых звеньев равной длины, сочлененных между собой шарнирами. Нечетные 9 из шарниров неподвижно соединены с замками 6 с внут- . ренней стороны рамок 5, а четные 12 снабжены фиксатором 13 развернутого положения звеньев рейки 10, представляющим собой подпружиненный штифт. На платформе установлено направляющее устройство 15, кинематически связанное с рейкой 10, выполненное в виде зубчатых колес и роликов. 2 з.п. ф-лы, 3 ил.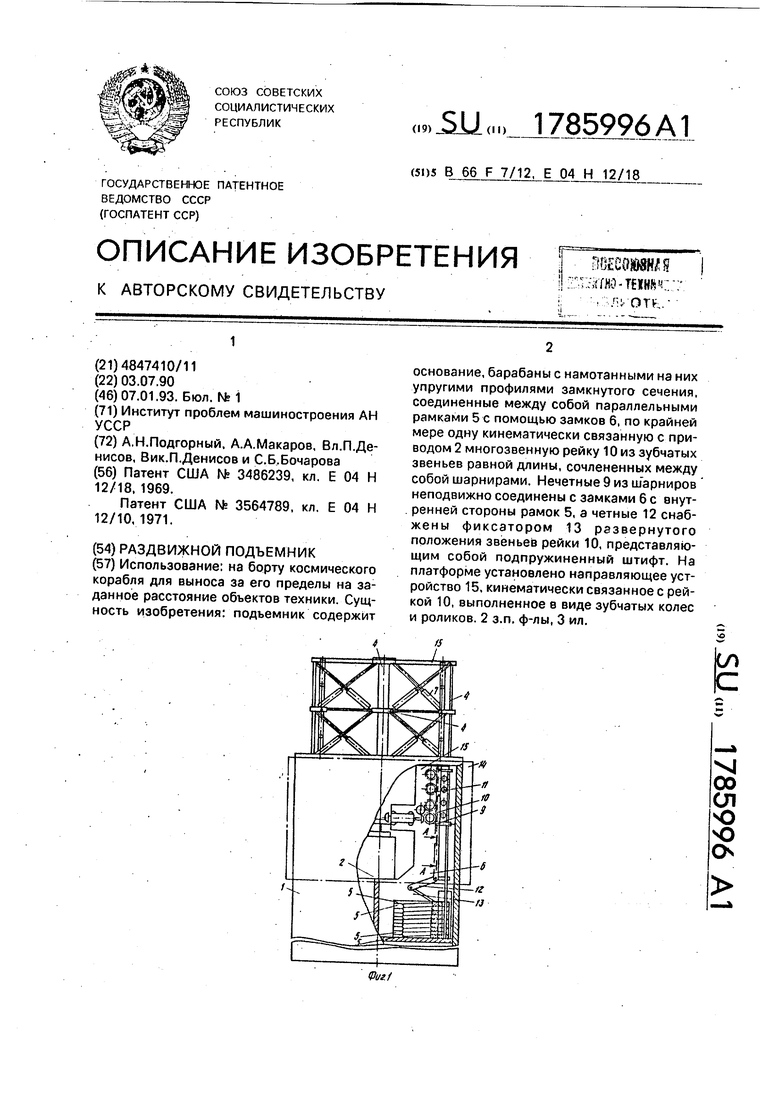
| Патент США № 3486239, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Патент США № 3564789, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
