Изобретение относится к средствам механизации и автоматизации и может быть использовано в роботизированных комплексах и автоматических линиях, например, листовой и объемной штамповки, для загрузки-выгрузки заготовок, межоперационного транспортирования,
Известно манипулятор к штамповочному прессу, содержащий каретку, установленные в ней направляющие элементы в виде скалок с закрепленной на них траверсой, на которой смонтированы захватные органы. Каретка расположена на направляющей и соединена с двумя телескопическими плунжерными силовыми цилиндрами, установленными навстречу друг другу. Траверса закреплена на скалках, к которым через промежуточный элемент закреплен копирный ролик.
Робот к штамп точному прессу работает следующим оСфс-зом.
В исходном положении каретка робота находится в крайнем левом положении, при этом один захватный орган находится в магазинном устройстве, а другой - в штампе. Затем осуществляется перемещение каретки в крайнее правое положение. При этом штанга с захватными органами поднимается вверх в соответствии с профилем копир- ного паза. При подходе каретки к правому крайнему положению траверса с захватными органами опускается. Заготовка из одного схвата попадает в штамп, а из другого - в тару. Далее цикл повторяется.
Недостатком известного робота к штамповочному прессу является жесткие кинематические параметры (отсутствие регулировочной величины продольного и вертикального перемещений) задаваемые копирным пазом.
Цель изобретения - повышение надежности манипулятора.
Поставленная цель достигается тем, что механизм вертикального перемещения траверсы выполнен в виде двух параллепьно смонтированных на каретке вертикальных скалок, промежуточной планки, размещенной на вышеуказанных скалках, подвижных
(Л
С
х| оо
N
00
IO
XI
пружин, установленных на скалках под промежуточной планкой, вертикальных стоек, жестко связывающих промежуточную планку с траверсой, при зтом ползушка размещена между двумя направляющими элементами с возможностью перемещения относительно каретки, копирный паз выполнен с У-образной рабочей поверхностью, а подъемный ролик установлен на промежуточной планке с возможностью взаимодей- стаия с У-образной рабочей поверхностью копирного паза, причем угол наклона каждого участка между роликом л рабочей поверхностью копирного паза, привод выполнен в виде двух плунжерных телескопических силовых цилиндров, корпуса которых смонтированы в корпусе, а штоки - закреплены на ползушке, в корпусе с двух сторон направляющих элементов, закреплены попарно регулируемые упоры, два из которых - с возможностью взаимодействия с кареткой, а два других - с ползушкой в крайних их положениях.
Положительный эффект при использо- вании изобретения достигается в производственных условиях при создании автоматизированных линий штамповки и других видов производств.
Перечень фигур графических изображений, иллюстрирующих изобретение (иллюстрации представлены в поданной заявке на изобретение).
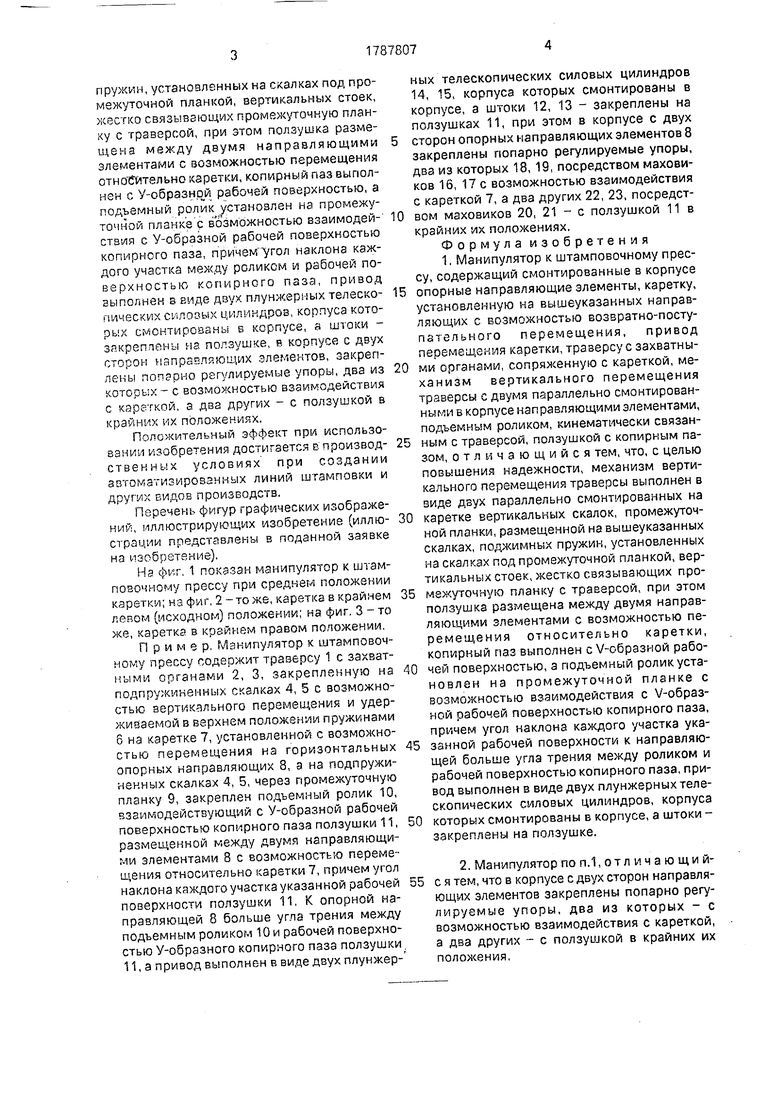
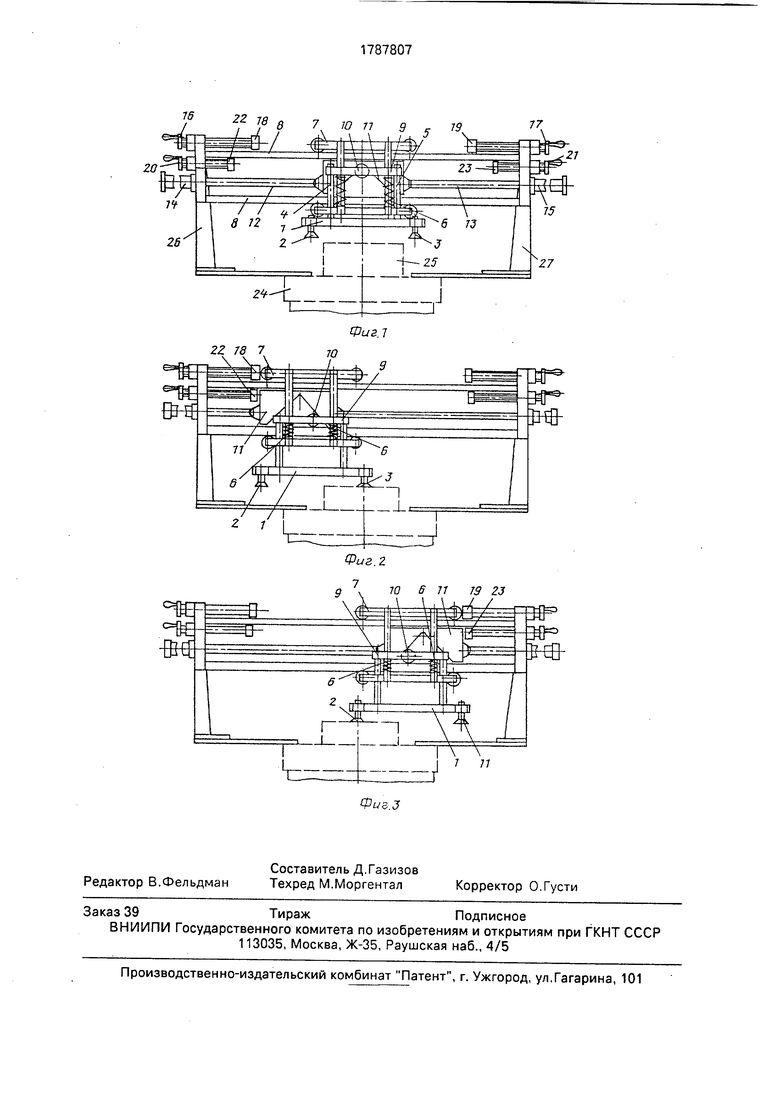
На фиг. 1 показан манипулятор к штамповочному прессу при среднем положении каретки; на фиг, 2 -тоже, каретка в крайнем левом (исходном) положении; на фиг. 3 - то же, каретка в крайнем правом положении,
Пример, Манипулятор к штамповочному прессу содержит траверсу 1 с захватными органами 2, 3, закрепленную на подпружиненных скалках 4, 5 с возможностью вертикального перемещения и удерживаемой в верхнем положении пружинами б на каретке 7, установленной с возможностью перемещения на горизонтальных опорных направляющих 8, а на подпружиненных скалках 4, 5, через промежуточную планку 9, закреплен подъемный ролик 10, взаимодействующий с У-образной рабочей поверхностью копмрного паза ползушки 11, размещенной между двумя направляющими элементами 8 с возможностью перемещения относительно каретки 7, причем угол наклона каждого участка указанной рабочей поверхности ползушки 11. К опорной направляющей 8 больше угла трения между подъемным роликом 10 и рабочей поверхностью У-образного копирного паза ползушки 11,а привод выполнен в виде двух плунжер-
ных телескопических силовых цилиндров 14, 15, корпуса которых смонтированы в корпусе, а штоки 12, 13 - закреплены на ползушках 11, при этом в корпусе с двух
сторон опорных направляющих элементов 8 закреплены попарно регулируемые упоры, два из которых 18, 19, посредством маховиков 16, 17с возможностью взаимодействия с кареткой 7, а два других 22, 23, посредством маховиков 20, 21 - с ползушкой 11 в крайних их положениях.
Формула изобретения
1. Манипулятор к штамповочному прессу, содержащий смонтированные в корпусе
опорные направляющие элементы, каретку, установленную на вышеуказанных направляющих с возможностью возвратно-поступательного перемещения, привод перемещения каретки, траверсу с захватными органами, сопряженную с кареткой, механизм вертикального перемещения траверсы с двумя параллельно смонтированными в корпусе направляющими элементами, подъемным роликом, кинематически связанным с траверсой, ползушкой с копирным пазом, отличающийся тем, что, с целью повышения надежности, механизм вертикального перемещения траверсы выполнен в виде двух параллельно смонтированных на
каретке вертикальных скалок, промежуточной планки, размещенной на вышеуказанных скалках, поджимных пружин, установленных на скалках под промежуточной планкой, вертикальных стоек, жестко связывающих промежуточную планку с траверсой, при этом ползушка размещена между двумя направляющими элементами с возможностью перемещения относительно каретки, копирный паз выполнен с V-образной рабочей поверхностью, а подъемный ролик установлен на промежуточной планке с возможностью взаимодействия с V-образной рабочей поверхностью копирного паза, причем угол наклона каждого участка указзнной рабочей поверхности к направляющей больше угла трения между роликом и рабочей поверхностью копирного паза, привод выполнен в виде двух плунжерных телескопических силовых цилиндров, корпуса
которых смонтированы в корпусе, а штоки - закреплены на ползушке.
2. Манипулятор по п.1, от л и ч а ю щи й- с я тем, что в корпусе с двух сторон направляющих элементов закреплены попарно регулируемые упоры, два из которых - с возможностью взаимодействия с кареткой, а два других - с ползушкой в крайних их положения,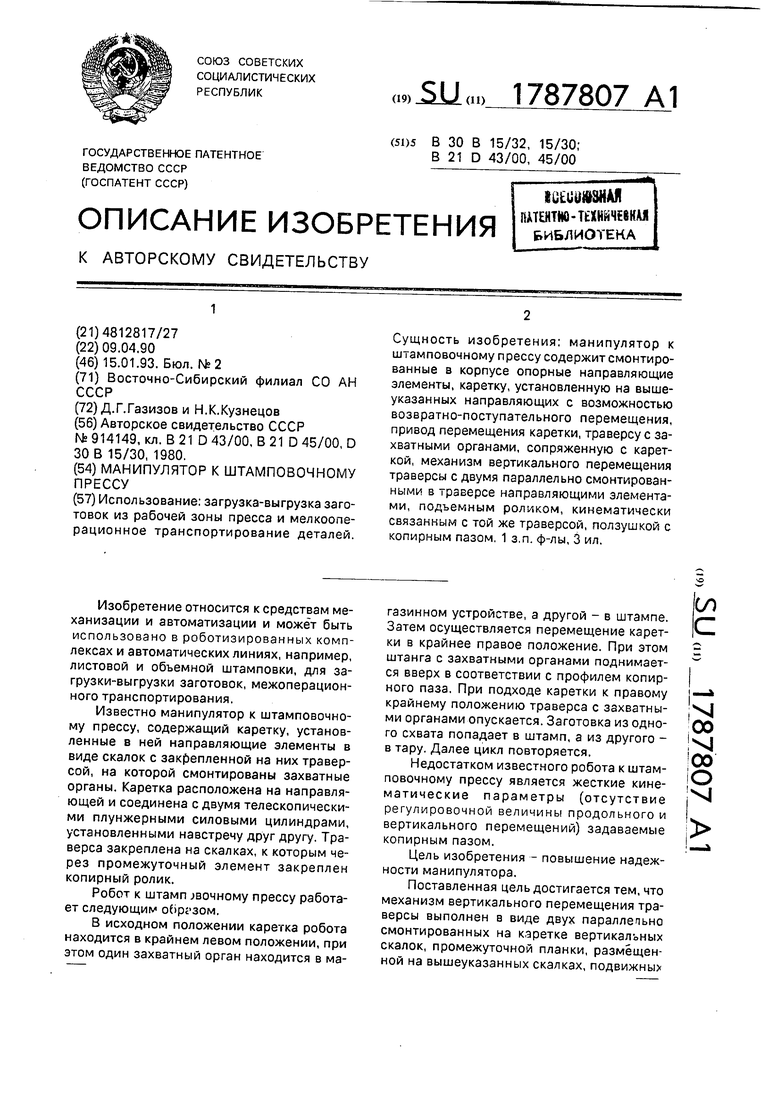
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот к штамповочному прессу | 1985 |
|
SU1340868A1 |
| МНОГОПОЗИЦИОННЫЙ ПРЕСС | 1992 |
|
RU2013173C1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| Автоматизированная поточная линия для изготовления сварных конструкций | 1991 |
|
SU1784430A1 |
| Устройство для отделения верхнего листа от стопы и подачи его в рабочую зону пресса | 1980 |
|
SU882684A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Устройство для отделения верхнего листа от стопы и подачи его в зону обработки | 1981 |
|
SU965566A1 |
| Устройство для подачи полосового и ленточного материалов в штамп | 1983 |
|
SU1138212A1 |
| Технологический модуль для объемной штамповки | 1990 |
|
SU1776214A3 |
Использование: загрузка-выгрузка заготовок из рабочей зоны пресса и мелкооперационное транспортирование деталей. Сущность изобретения: манипулятор к штамповочному прессу содержит смонтированные в корпусе опорные направляющие элементы, каретку, установленную на вышеуказанных направляющих с возможностью возвратно-поступательного перемещения, привод перемещения каретки, траверсу с захватными органами, сопряженную с кареткой, механизм вертикального перемещения траверсы с двумя параллельно смонтированными в траверсе направляющими элементами, подъемным роликом, кинематически связанным с той же траверсой, ползушкой с копирным пазом. 1 з.п. ф-лы, 3 ил.
| Авторское свидетельство СССР №914149, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
