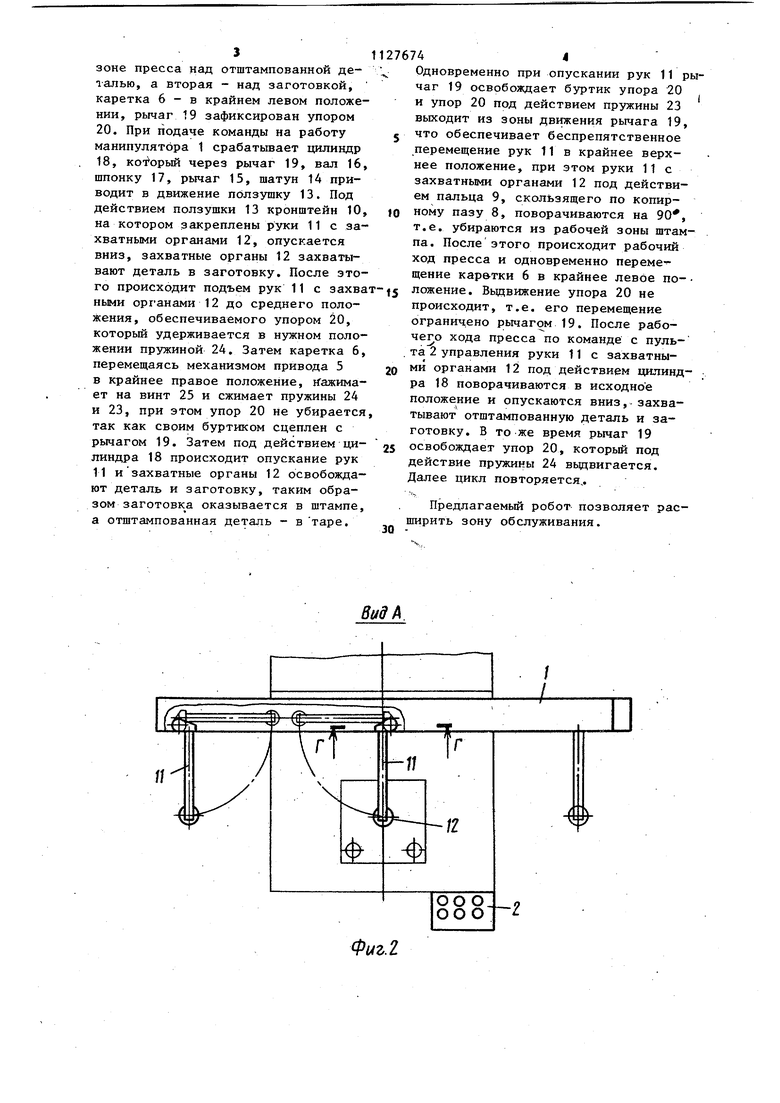
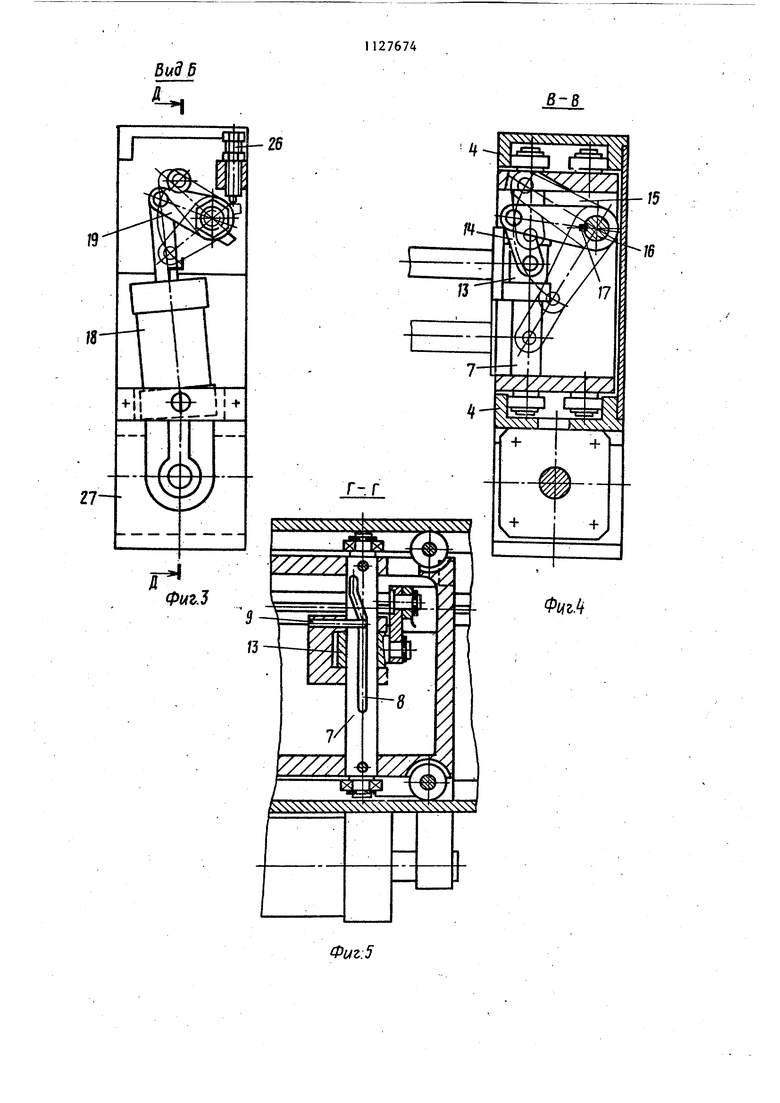
Изобретение относится к обработке металлов давлени.ем, в частности к средствам автоматизации, и может бьггь использовано в различных отраслях машиностроения для подачи за готовок в штамповочньй пресс и удаления из рабочей зоны отштампованных деталей. Известен промышленный робот к штамповочному прессу, содержащий две механические руки с захватами, смонтированные в корпусе с возможностью вертикального перемещения, горизонтального перемещения и поворота в горизонтальной плоскости и связанные с приводами вертикально го и горизонтального перемещения и поворота. Приводы выполнены в виде . зубчато-реечной передачи, связанной с пневмоцилиндрами Cl 3 Этот робот обеспечивает высокую производительность, однако имеет сложньй по конструкции привод. Наиболее близким к изобретению по существенньм признакам и достига емому эффекту является робот к штам повочному прессу, содержащий пульт управления, упор, горизонтальные направляющие, размещенную на них с возможностью возвратно-поступательного перемещения каретку с осями, несущую по меньшей мере две руки с захватами, установленные с возможностью вертикального возвратно-поступательного перемещения от привода, включающего пневмоцилиндр C2j Недостатком известного робота является небольшая зона обслуживаЦель изобретения - расширение зо Ы обслуживания. Цель достигается тем, что в роботе к штамповочному прессу, содер жащем пульт управления, упор, гори зонтальные направляющие, размещенную на них с возможностью возвратн поступательного перемещения каретк с осями, несущую по меньшей мере д руки с захватами, установленные с возможностью вертикального возврат но-поступательного перемещения от привода, включающего пневмоцилиндр оси установлены вертикально и в каждой из них выполнен копирный па руки установлены с возможностью поворота в горизонтальной плоскости и каждая из них связана с одной из осей посредством кронштейна, пол-зушки, охватываемой кронштейном. установленной на оси с возможностью относительноговозвратно-поступательного перемещения, шарнирно-рычажной системы, связывающей ползушку с пневмоцилиндром, пальца, размещенного одним концом в копирном пазу, а другим связанным с кронштейном, упор установлен с возможностью взаимодействия с одним из рычагов шарнирно-рычалсной системы и связан с кареткой посредством двуплечего рычага, одно плечо которого подпружинено н. направлении каретки, а другое - в направлении упора. На фиг.1 изображен предлагаемый робот, на фиг.2 - вид А на фиг.1; на фиг.З - вид Б на фиг.1 на фиго4разрез В-В на фиг.1j на фиг.5 - разрез Г-Г на фиг.2; на фиг.6 - разрез Д-Д на фиг.З. Робот к листоштамповочному прессу содержит манипулятор 1 и пульт 2 управления. Манипулятор 1 состоит из рамы 3 с закрепленными на ней направлякицими 4, по которым перемещается механизмом привода, например, пневмоцилиндром 5, каретка 6. На каретке 6 закреплены вертикальные оси 7 с копирным (байонетным) пазом 8, взаимодействзтощим с пальцем 9, закрепленным на кронштейне 10, который перемещается по оси 7 в вертикальной плоскости и поворачивается вокруг нее. К кронштейну 10 с возможностью регулировки крепятся руки t1 с захватными органами 12. По оси 7 перемещается ползушка. 13, соединенная через шатун 14 с рычагом 15, который поворачивается на валу 16 через скользящую шпонку 17. Вал 16 приводится во вращение от цилиндра 18 через рычаг 19. Этот механизм перемещения рук имеет три фиксированных положения. Среднее положение обеспечивает упор 20, убирающийся под действием рычага 21, качающегося на оси 22, пружин 23 и 24 и регулировочного винта 25. Ре- гулировка крайнего нижнего положения рук осуществляется болтом 26. Манипулятор снабжен кронштейном 27 ля крепления на прессе. Робот к штамповочному прессу работает следующим образом. В исходном положении руки 11с захватными органами 12 перпендикуярны направлению перемещения каретки 6, одна рука находится в рабочей 3 зоне пресса над отштампованной деталью, а вторая - над заготовкой, каретка 6 - в крайнем левом положении, рычаг 19 зафиксирован упором 20. При подаче команды на работу манипулятора 1 срабатывает цилиндр 18, через рычаг 19, вал 16, шпонку 17, рычаг 15, шатун 14 приводит в движение ползушку 13. Под действием ползушки 13 кронштейн 10, на котором закреплены руки 11 с захватными органами 12, опускается вниз, захватные органы 12 захватывают деталь в заготовку. После этого происходит подъем рук 11 с захва ными органами 12 до среднего положения, обеспечиваемого упором 20, который удерживается в нужном положении пружиной 24. Затем каретка 6, перемещаясь механизмом привода 5 в крайнее правое положение, ггажимает на винт 25 и сжимает пружины 24 и 23, при этом упор 20 не убирается так как своим буртиком сцеплен с рычагом 19. Затем под действием цилиндра 18 происходит опускание рук 11 и захватные органы 12 освобождают деталь и заготовку, таким образом заготовк а оказывается в штампе, а отштампованная деталь - втаре. 44 Одновременно при опускании рук 11 рычаг 19 освобождает буртик упора 20 и упор 20 под действием пружины 23 выходит из зоны движения рычага 19, что обеспечивает беспрепятственное перемещение рук 11 в крайнее верхнее положение, при этом руки 11с захватными органами 12 под действием пальца 9, скользящего по копирному пазу 8, поворачиваются на 90, т.е. убираются из рабочей зоны штампа. После этого происходит рабочий ход пресса и одновременно перемещение кар&тки 6 в крайнее левое по- ложение. Вьщвижение упора 20 не происходит, т.е. его перемещение ограничено рычагом 19. После рабочего хода пресса по команде с пульта 2 управления руки 11 с захватными органами 12 под действием цилиндра 18 поворачиваются в исходное положение и опускаются вниз, захватывают отштампованную деталь и заготовку. В то же время рычаг 19 освобождает упор 20, который под действие пружины 24 вьщвигается. Далее цикл повторяется,. Предлагаемый робот позволяет расширить зону обслуживания.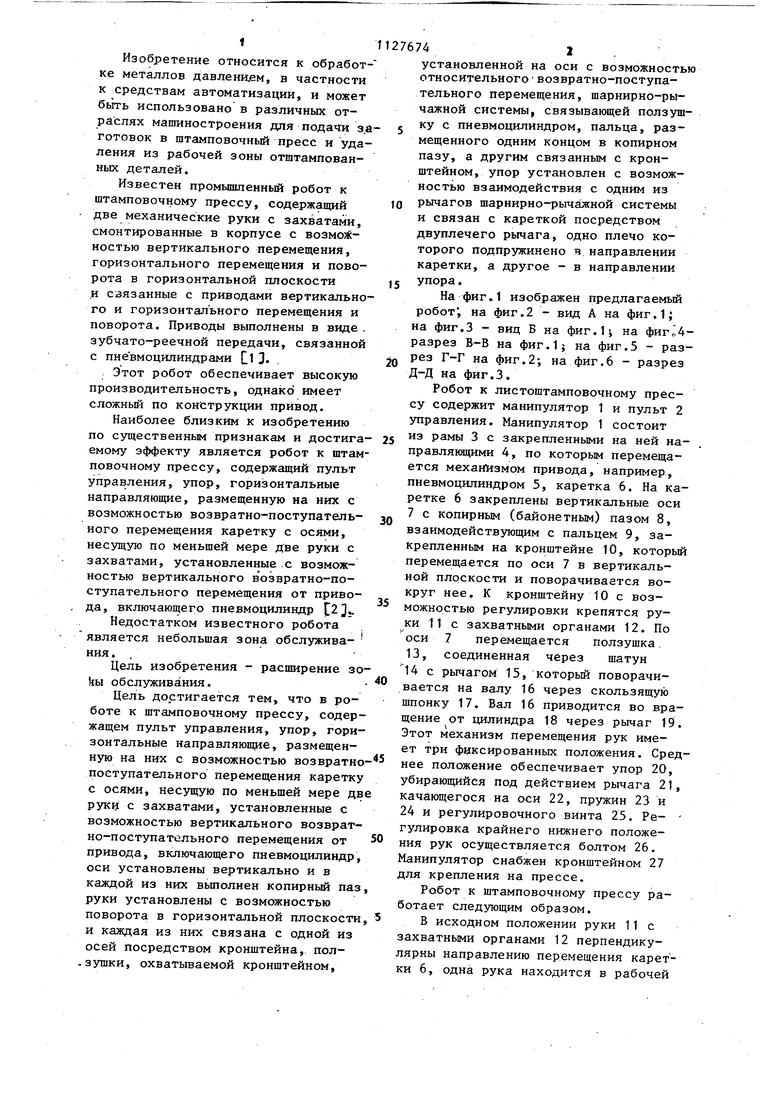
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор к штамповочному прессу | 1990 |
|
SU1787807A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Робот к штамповочному прессу | 1985 |
|
SU1340868A1 |
| Автоматизированный комплекс для штамповки листовых заготовок | 1982 |
|
SU1061896A1 |
| Устройство для подачи штучных заготовок в рабочую зону штампа | 1980 |
|
SU912353A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Промышленный робот | 1983 |
|
SU1155334A1 |
| Автоматизированный комплекс для многопереходной штамповки | 1982 |
|
SU1013042A1 |
| Устройство для поштучной выдачи заготовок | 1973 |
|
SU500857A1 |
| Магазинное устройство робототехнологического комплекса | 1987 |
|
SU1542669A1 |
РОБОТ К ШТАМПОВОЧНОМУ ПРЕС.СУ, содержапщй пульт управления, упор, горизонтальные направляющие, размещенную на них с возможностью I возвратно-поступательного перемеще,ния каретку jc осями, несущую по меньшей мере две руки с захватами, установленные с возможностью верти-i кального возвратно-поступательного перемещения от привода, включающего пневмоцилиндр, отличающи й127674 3150 в 21 D 43/00; В 30 В 15/30; В 25-J 11/00 с я тем, что, с целью расширения зоны обслуживания, оси установлены вертикально и в каждой из них выполнен копирный паз, руки установлены с возможностью поворота вггоризонтальной плоскости и каждая из них связана с одной из осей посреди ством кронштейна, ползушки, охватываемой кронштейном, установленной на оси с возможностью относительного возвратно-поступательного перемещения, шарнирно-рычажной системы, связывающей ползушку с пневмоцилиндром, пальца, размещенного одним. концом в копирном пазу, а другим связанным с кронштейном, упор установлен с возможностью взаимодей(Л ствия с одним из рычагов шарнирнорычажной системы и связан с каретс кой посредством двуплечего рычага, одно плечо которого подпружинено в направлении каретки, а другое в направлении упора. tsD 
Фиг. 2
5udJ A 27Фиг:5
B-B
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промышленный робот | 1978 |
|
SU863093A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР | |||
| Автоматизированный комплекс для штамповки | 1981 |
|
SU997924A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
