Изобретение относится к обработке металлов давлением и может бытв использовано для подачи в рабочую зону пресса листовых заготовок и . удаления из рабочей зоны пресса готовых деталей.
Целью изобретения является упрощение конструкции.
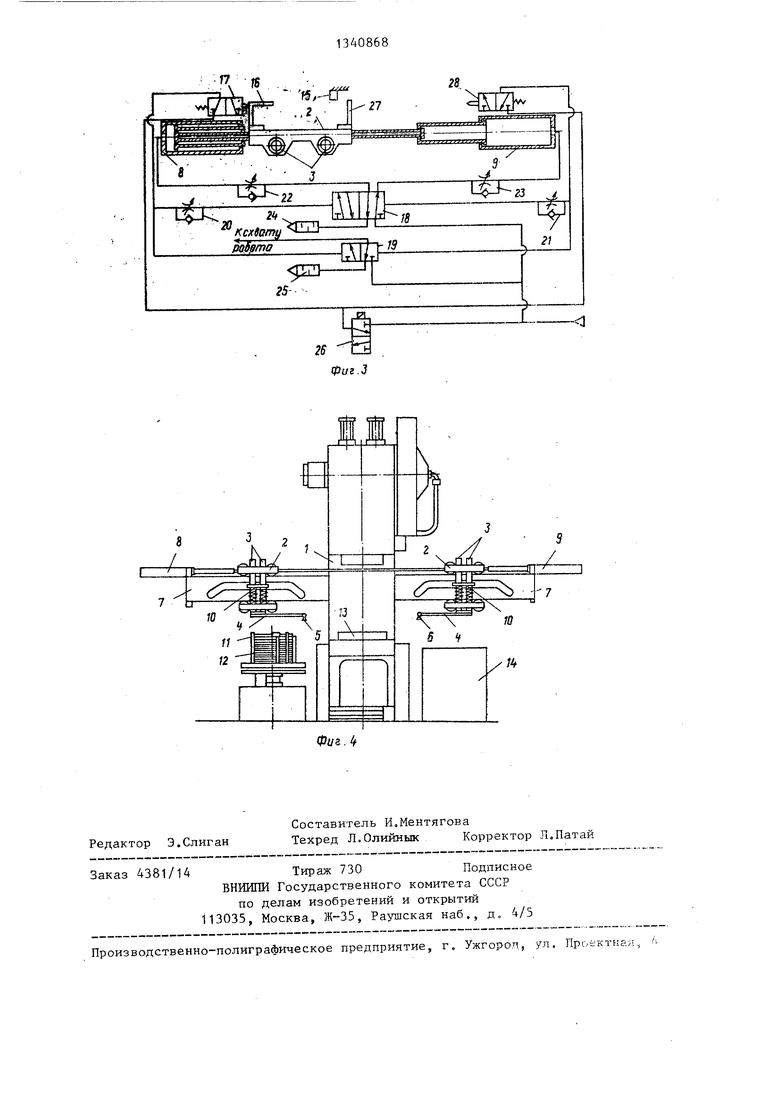
На фиг. 1 схематически изображен робот к штамповочному прессу, общий вид; lia фиг. 2 - разрез А-А на фиг. 1; на фиг, 3 - пневмокинемати- ческая схема робота; на фиг. А - вариант исполнения робота.
Робот установлен на станине пресса 1 и содержит каретку 2, установленные в ней направляющие элементы в виде скалок 3 с закрепленной на них траверсой 4, на которой смонтиро ваны захватные органы 5 и 6. Каретка 2 расположена на направляющей 7 и соединена с двумя тeлecкoпичecки и плунжерными силовыми цилиндрами 8 и 9, установленными навстречу друг Другу. Траверса 4 за.креплена на скалках 3, к которым через промежуточный элемент закреплен копирный- ролик 10. Материал 11 укладывается в магазинное устройство 12 и в штамп 13, а готовые изделия - в тару 14. Датчик 15 (фиг, 3) служит для включения пресса при взаимодействии с упором 16, который также используется для нажатия на толкатель пневмораспреде- лителя 17, управляющим пневмораспре- делителями 18 и 19 о Пневмораспреде- литель 18 связан с пневмоцилиндрами 8 и 9, а 19 - с захватными органами робота. Дроссели 20 и 21 служат для задержки сигнала к пневмораспределителю 18, тем самым обеспечивается возможность захватным органам 5 и 6 сработать раньше, чем начнется перемещение каретки 2. Дроссели 22 и 23 служат для регулировки скорости перемещения плунжеров в телескопических плунжерных силовых цилиндрах 8 и 9. Выхлоп воздуха из пневмораспре- делителей 18 и 19 осуществляется в глушители 24 и 25. Пневмораспредели- тель 26 предназначен для пуска в автоматическом режиме и остановки робота.
Робот к штамповочному прессу работает следующим образом.
В исходном положении каретка 2 робота находится в крайнем левом положении, при этом захватный орган
0
5
o
5 находится в магазинном устройстве 12, а захватный орган 6 - в штампе 13. Для включения робота необходимо нажать кнопку пневмораспредели- теля 26, В связи с тем, что толкатель пневмораспределителя 17 утоплен упором 16, то сжатый воздух по трубопроводам попадает в пневмораспре- делители 18 и 19, причем в пневморас- пределитель 19 .он поступает раньше, нежели в пневмораспределитель 18, в результате захватные органы 5 и 6 захватывают заготовку соответственно из магазинного устройства и из штампа пресса 13, а затем осуществляется перемещение каретки в крайнее правое положение. При этом Ц1танга 4 с захватньпчи органами 5 и 6 поднимается вверх в соответствии с профилем копирного паза. Выдвижению плунжеров силового цилиндра 8 соответствует возврат соответствующих плунжеров силового цилиндра 9.
25
При подходе каретки к правому крайнему положению траверса 4 с захватными органами 5 и 6 опускается, и при нажатии упора 27 на толкатель
30 пневмораспределителя 28 поступает сигнал на воздухораспределители схваты отключаются, заготовка из схзата 5 попадает в штамп пресса 13, а отштампованная деталь - в тару 14. При поступлении сигнала на воздухораспределитель 18 последний переключается, сжатьй воздь х поступает в плунжер цилиндра 9 и сбрасьтается из плунжерного цилиндра 8, каретка 2 начинает перемещаться влево, при этом траверса 4 с захватными органами 5 и 6 перемещается вверх в соответствии с профилем копирного паза. При выходе захватного органа 5 из зоны действия штампа упор 16 взаш-ю- действует с датчиком 15, который включает пресс на совершение технологического хода. Синхронизация работы пресса и перемещения каретки 2 осуществляется дросселем 23 и длиной упбра 16„ В случае,, если упор 16 каретки 2 вышел из взаимодейстзия с датчиком 155 а пресс не вернулся в исходное положение, от датчика 15 выдается команда на аварийное отключение пресса и робота. При подходе каретки к крайнему левому положению траверса 4 с захватными органами. 5 и 6 опускается, а при нажатин упора
35
40
45
50
55
16 на пневмораспределитель 29 цикл повторяется.
Изобретение позволяет упростить конструкцию и повысить надежность робота за счет уменьшения количества промежуточных элементов и звеньев и осуществления горизонтального и вертикального перемещений от одного привода, а также улучшить динамические характеристики за счет применения плунжерных телескопических цилиндров и подпружиненных скалок, позволяющих осуществить разгон каретки на первой половине перемещения и торможения на второй.
Форм у л а изобретения
1. Робот к штамповочному прессу, содержащий установленную на основани направляющую, установленную на нап
линдра,
равляющей с возможностью возвратно- поступательного перемещения каретку установленную на каретке с возможностью возвратно-поступательного перемещения относительно каретки в направлении, перпендикулярном направлению перемещения каретки, траверсу с направляющими элементами и захватным органом, и привод перемещения каретки в виде силового циотличающийсятем, что, с целью повышения надежности, он снабжен установленным на станине копиром, траверса снабжена роликом, установленным с возможностью взаимодействия с копиром и подпружинена относительно каретки в направлении перемещения траверсы.
2. Робот по п. 1, отлича ю- щ и и с я тем, что силовой цилиндр вьтолнен телескопическим.
28.

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор к штамповочному прессу | 1990 |
|
SU1787807A1 |
| Устройство для подачи полосового материала в рабочую зону пресса | 1986 |
|
SU1371746A1 |
| Робот к штамповочному прессу | 1988 |
|
SU1538966A1 |
| Устройство для манипулирования заготовками типа труб | 1974 |
|
SU504597A1 |
| Устройство для обработки плоских заготовок | 1983 |
|
SU1159696A1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Автоматизированная линия штамповки деталей | 1986 |
|
SU1389914A1 |
Изобретение относится к обра- , ботке металлов давлением и может быть использовано для подачи в рабочую зону пресса листовых заготовок и удаления из рабочей зоны пресса готовых деталей. Целью изобретения является повышение надежности за счет уменьшения количества кинематических звеньев и улучшения динамических характеристик. Для достижения цели робот снабжен копиром, траверса - роликом, взаимодействующим с копиром, а силовой цилиндр выполнен телескопическим. При включении робота захватные органы 5 и 6 захватывают заготовки, силовой цилиндр 8 перемещает каретку 2 к прессу. Ролик 10, перемещаясь по копирном пазу, поднимает траверсу 4 с -захватными органами, а при подходе к прессу опускает последнюю. 1 з.п, ф-лы, 4 ил. i сл СА: 4 О 00 сх
Редактор Э.Слиган
Составитель И.Ментягова
Техред Л.Олийнык Корректор Л.Патай
Заказ 4381/14Тираж 730Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, , Раушская наб.,, д, 4/5
в.-.м.-.-«в. - - -- -.-.- - - -..-----
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектн&я,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
