Изобретение относится к механизмам, применяемым в строительной индустрии.
Известно устройство для гибки плоских монтажных петель, содержащее бухтодержатель, механизмы правки, рубки, подачи и гибки.
Недостатками устройства-прототипа являются низкая производительность, обусловленная невозможностью параллельного выполнения технологических операций, а также узкие технические возможности, обусловленные ручной переналадкой станка на различную длину изготовляемой детали.
Цель изобретения - повышение производительности устройства за счет параллельного выполнения технологических операций и расширения технических возможностей посредством автоматической переналадки на нужную длину заготовки при изменении типоразмеров петель.
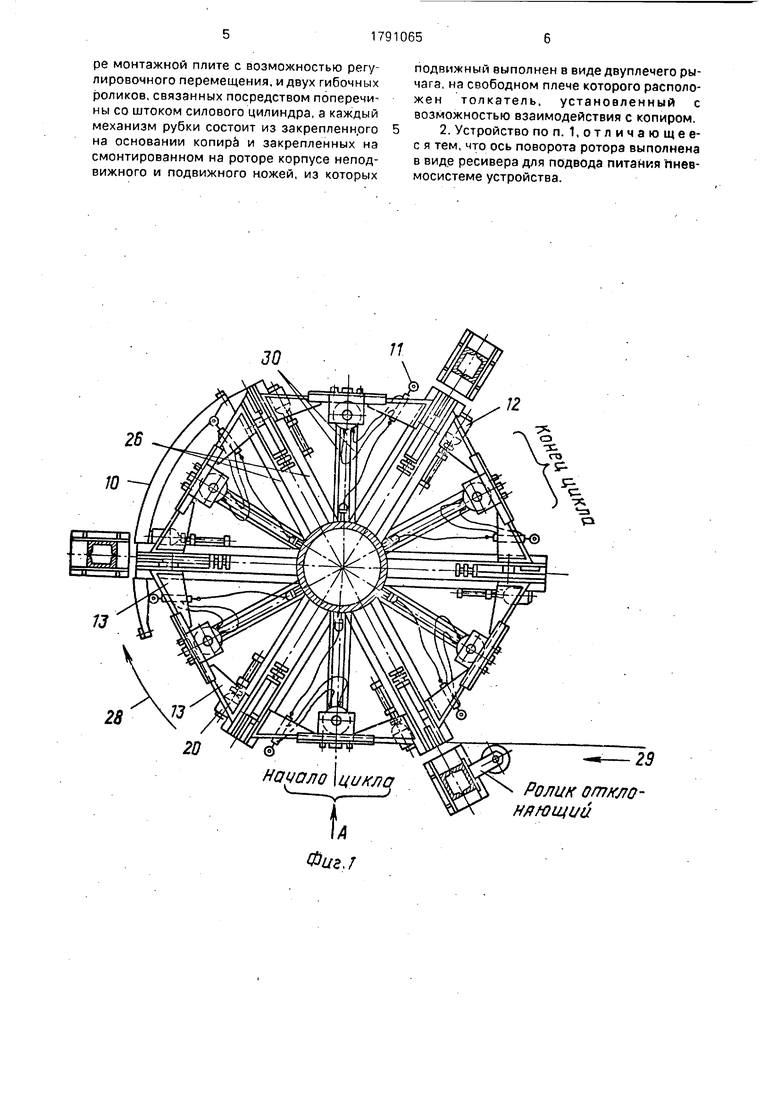
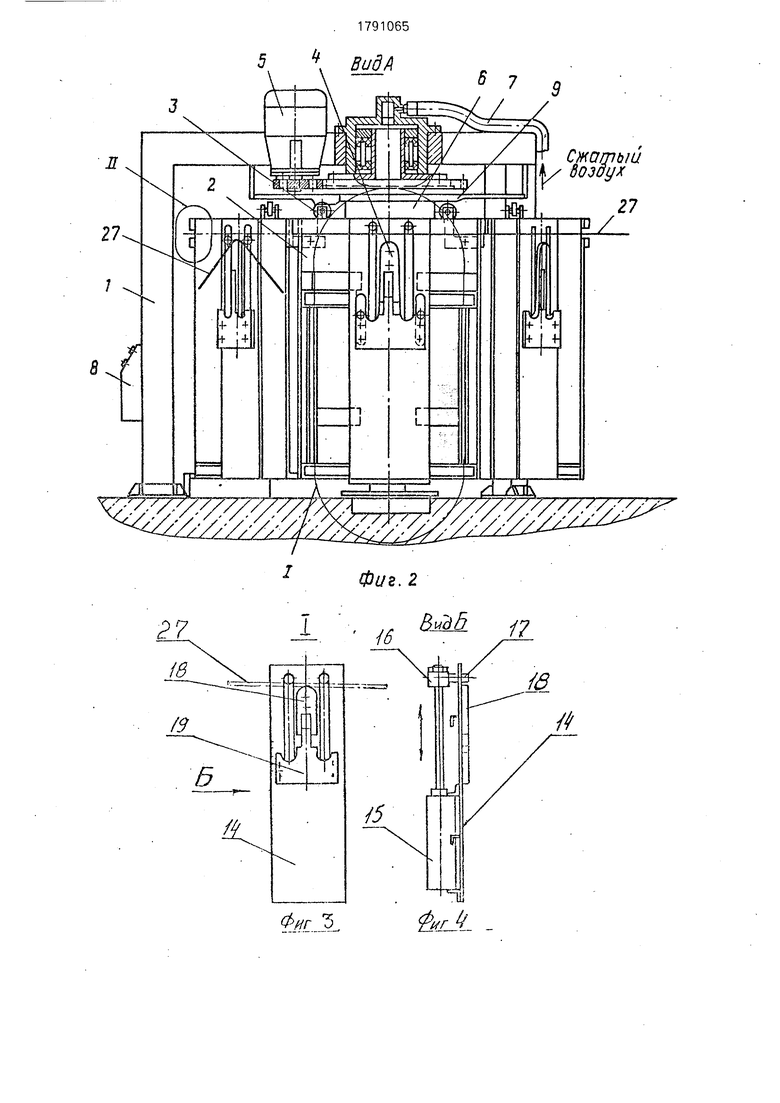
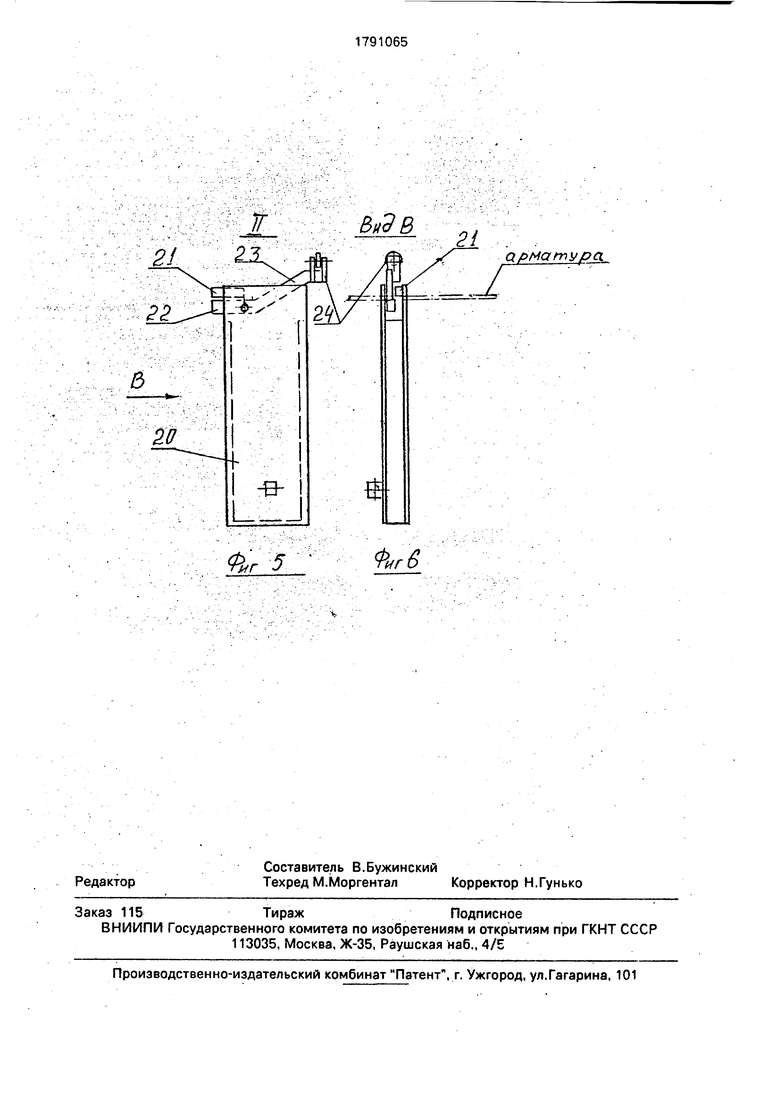
На фиг. 1 изображено устройство в плане; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 4- узел I на фиг. 2 (механизм гибки); на фиг. 4 - вид по стрелке Б на фиг. 3; на фиг. 5-узел II на фиг. 2 (механизм рубки); на фиг. 6 - вид по стрелке В на фиг. 5.
Устройство состоит из станины 1, ротора 2, механизма рубки 3, механизма гибки 4, привода 5 ротора 2, ресивера 6, магистрали подачи сжатого воздуха 7, пульта управления 8, копира для привода механизмов рубки 9, копира 10 для управления пнев- моприводами механизмов гибки 10, переключателей пневматических 11, предназначенных для взаимодействия с коЫ
ю о
Os
ел
пиром 10, привода 12 одновременного возвратно-поступательного перемещения механизмов рубки и гибки при автоматической переналадке станка на различные типоразмеры изделий, Устройство содержит также консольные кронштейны 13, жестко прикрепленные к боковым поверхностям механизма рубки и кинематически связанные с механизмами гибки. Каждый механизм гибки состоит из вертикальной плиты 14, несу- щей силовой цилиндр 15, к штоку которого присоединены посредством поперечины 16 гибочные ролики 17. На плите 14 со стороны, противоположной силовому цилиндру 15; прикреплена матрица 18, нижняя часть 19 которой выполнена с возможностью вертикального перемещения для регулировки высоты гиба. Механизм рубки 3 состоит из корпуса 20, в верхней части которого распо- /южен неподвижный нож 21 и подвижный нож 22, выполненный в виде двуплечего рычага 23,на свободном плече которого расположен толкатель 24, предназначенный для взаимодействия с копиром 9. Каждый из механизмов рубки 3 расположен с возмож- ностью перемещения приводом 12 в направляющих 25, расположенных радиально и сочлененных с ресивером б, выполняющим также функцию оси поворота 6 ротора 2 устройства. Проволока для гибки изделий обозначена поз. 27. Стрелкой 28 обозначено направление вращения ротора, а стрелкой 29 направление подачи проволоки 27. Радиальные направляющие механизмов гибки обозначены позицией 30.
Устройство работает следующим образом.
Проволоку 27 из бухтодержателя через механизм правки (бухтодержатель и механизм правки на чертежах условно не пока- заны) подводят к одному из механизмов рубки 3 и фиксируют в нем. Затем включают привод 5 ротора, вращением которого осуществляется протягивание проволоки 27. При этом поворотом ротора 2 на 1/6 часть окружности проволока 27 укладывается на грань механизма гибки 4 и фиксируется между ножами очередного механизма рубки, При дальнейшем враидении передний конец проволоки обрубается за счет взаи- модействия толкателя 24 с копиром 9. Затем при дальнейшем повороте на 1/6 часть ок- руж ности переключателем 11, взаимодействующим с копиром 10, включают силовой цилиндр 15, шток которого, осуществляя движение вниз производит с помощью гибочных роликов 17 и матрицы 18 гибку изделия. На выходе из копира 10 переключатель 11 реверсирует цилиндр 15, при этом ролики 17 возвращаются в исходное положение.
а изделие сбрасывается с матрицы (механизм сбрасывания не показан).
Таков технологический цикл работы одной грани устройства.
Поскольку на роторе 2 устройства имеется шесть граней с соответствующим количеством механизмов рубки и гибки, то за один оборот ротора 3 изготавливается шесть изделий, чем обусловлена высокая производительность устройства.
Второе свойство устройства - автоматическая переналадка его на нужную длину заготовки, осуществляется одновременным включением приводом 20, которые сместят механизм рубки и гибки к оси вращения ротора 2 на величину,определяемую, например, путевыми выключателями (на чертежах не показаны). Указанное смещение механизмов рубки 3 и гибки 4 уменьшает ширину граней ротора 2 и соответственно длину заготовок изделий, сохраняя симметричное расположение заготовки (проволоки 27) относительно матрицы 18.
Предложенная конструкция устройства позволяет повысить производительность за счет параллельного выполнения технологических операций и расширяет технические возможности устройства за счет автоматической переналадки его на нужную.длину заготовки.
Формула изобретения 1. Устройство для гибки плоских монтажных петель, включающее размещенные на оснований механизмы подачи, резки и гибки проволоки, а также средство для регулирования длины изделия, о т л и ч а ю щ е- е с я тем, что, с целью повышения производительности и расширения технических возможностей за счет обеспечения автоматической переналадки устройства на различные длины заготовки при изменении типоразмеров петель, устройство снабжено дополнительными механизмами гибки и резки и приводным поворотным вокруг вертикальной оси ротором, выполненным в виде многогранной призмы, средство для регулирования длины изделия включает радиальные направляющие, выполненные в углах граней призмы, в-которыхс возможностью возвратно-поступательного перемещения установлены механизмы рубки, и радиальные направляющие, в которых с возможностью совместного перемещения с механизмами рубки смонтированы сочлененные с механизмом рубки механизмы гибки, а также связанные с вышеназванными механизмами силовые цилиндры, каждый механизм гибки состоит из матрицы, закрепленной на смонтированной на роторе монтажной плите с возможностью регулировочного перемещения, и двух гибочных роликов, связанных посредством поперечины со штоком силового цилиндра, а каждый механизм рубки состоит из закрепленного на основании копира и закрепленных на смонтированном на роторе корпусе неподвижного и подвижного ножей, из которых
подвижный выполнен в виде двуплечего рычага, на свободном плече которого располо- жен толкатель, установленный с возможностью взаимодействия с копиром. 2. Устройство по п. 1,отличающее- с я тем, что ось поворота ротора выполнена в виде ресивера для подвода питания пнев- мосистеме устройства.
tir S..
Фи г в

| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для изготовления изделий из проволоки типа шплинтов | 1982 |
|
SU1093380A1 |
| Гибочно-отрезной автомат для изготовления проволочных изделий | 1984 |
|
SU1414493A1 |
| ЛИНИЯ ИЗГОТОВЛЕНИЯ ЗИГЗАГООБРАЗНЫХ ИЗДЕЛИЙ | 1994 |
|
RU2084302C1 |
| Автомат для изготовления заготовок одновитковых секций обмоток электрических машин | 1979 |
|
SU884046A1 |
| Автомат для изготовления гнутых изделий из проволоки | 1980 |
|
SU906637A1 |
| Устройство для изготовления из проволоки фигурных пружинных деталей | 1989 |
|
SU1688964A1 |
| Станок для изготовления проволочных деталей | 1979 |
|
SU897333A1 |
| Автомат для изготовления сеток из проволоки | 1978 |
|
SU716686A1 |
| Гибочно-отрезной автомат для изготовления проволочных деталей | 1984 |
|
SU1232346A1 |
| Автомат для отрезки и гибки проволочных деталей | 1979 |
|
SU874246A1 |
Использование: изобретение относится к механизмам, применяемым в строительной индустрии, и позволяет повысить производительность и расширить технические возможности устройства. Сущность изобретения: устройство выполнено в виде ротора,, форма которого - шестигранная призма с шестью механизмами рубки проволоки и шестью механизмами гибки, расположенными соответственно в вершинах углов призматического ротора и в плоскости его граней с возможностью управляемого одновременного радиального перемещения при переналадке устройства на требуемую длину заготовки. Компоновка устройства обеспечивает параллельное осуществление технологических операций. Поворотом ротора на 1/6 часть окружности проволока укладывается на грань механизма гибки и фиксируется между ножами очередного механизма рубки. При дальнейшем вращении ротора передний конец проволоки обрубается за счет взаимодействия толкателя с копиром. При следующем поворота ротора на 1/6 часть окружности переключателем механизма гибки, взаимодействующим с копиром механизма гибки, включает соответствующий механизм гибки, при четвертом повороте на 1/6 готовое изделие удаляется с механизмами гибки. 1 з. п. ф-лы, 6 ил. СО
| Гибочно-отрезной автомат для изготовления проволочных изделий | 1984 |
|
SU1414493A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
