Изобретение относится- к подъемно- транспортному оборудованию, а именно к устройствам для перевода стрелы из рабочего положения в транспортное и обратно.
Известно устройство для перевода стрел j крана в транспортное положение, содержащее датчик усилия в тросе главного подъема, усилитель, схемы сравнения, датчик положения стрелы, программный блок, схемы управления приводами и узел крепления га ов к основанию.
Недостаток устройства заключается в том, ч|о при переводе стрелы крана из одного положения в другое И одновременной работе1 механизмов подъема груза и изменения взлета стрелы в грузовом и стреловом каната могут возникать избыточные, взаимокомпенсирующие усилия, перегружающие электроприводы и снижающие надежность и безопасность эксплуатации крана.:
КрЬме того, необходимость одновременного, ручного управления двумя механизмами снижает удобство эксплуатации, а наличие в устройстве программного блока усложняет его и уменьшает надежность.
Целью изобретения является повышение безопасности.
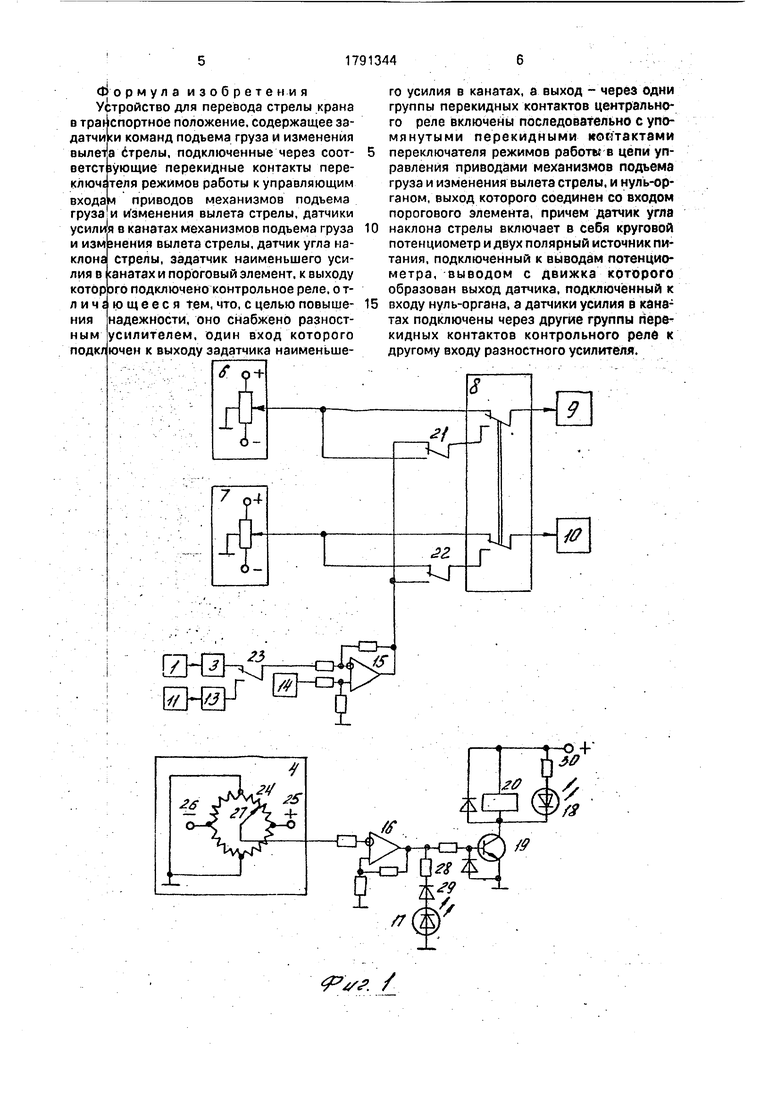
На фиг. 1 представлена функциональная схема устройства для перевода стрелы в транспортное положение; на фиг. 2 -чертеж плавучего стрелового крана,
Устройство для перевода стрелы в транспортное положение содержит задат- чики 1,2 механизмов подъема груза и изменения вылета стрелы 3, подключенные через перекидные контакты переключателя 4 режимов работы к управляющим входам приводов 5, 6 механизмов подъема груза и изменения вылета стрелы 3. Устройство содержит также датчики 7, 8 усилия в картах 9, 10 механизмов подъема груза и изменения вылета стрелы 3 с усилителями 11, 12, задатчик 13 наименьшего усилия в канатах, датчик 14 угла наклона стрелы 3 и пороговый элемент (транзисторный ключ) 1В, выел С
XI
Ч
CJ
N
ход которого включен в цепь обмотки реле 16. Устройство снабжено разностным усилителем 17, один вход которого подключен к выходу задатчика 13, а выход через одни группы перекидных контактов 18,19 реле 16 включен в цепи перекидных контактов переключателя 4, и нуль-органом 20, выход которого соединен со входом элемента 15. Датчик 14 включает в себя круговой потенциометр 21 и двухполярный источник 22 пи- тания, подключенный к выводам потенциометра 21, движком 23 которого образован выход датчика 14. Выход датчика 14 подключен ко входу нуль-органа 20, а датчики 7, 8 подсоединены через другую группу перекидных контактов 24 реле 16 к другому входу усилителя 17. К выходам нуль-органа 20 и элемента 15 подключены также индикаторы 25,26.
.
На понтоне крана расположены узел 27 крепления гака 28, опорная стойка 29 для укладки стрелы 3 и лебедки 30, 31 грузового и стрелового канатов 9, 10.
Устройство для перевода стрелы в транспортное положение работает следующим образом.. - ;
Перед началом перевода гак 28 закрепляется в узле 27, задатчики 6, 7 устанавливаются в нейтральное положение, а переключатель 4 переводится в положение укладка (нижнее на фиг. 1). При нахождении стрелы 3 в рабочем положении (справа от вертикальной оси) на движке 23 потенциометра 21 датчика 14 присутствует напря- жение положительной полярности, под действием которого на выходе нуль-органа 20 появляется фиксированное напряжение отрицательной полярности, зажигающее светодиод 25 и закрывающее транзистор 15. Горящий светодиод 25 сигнализирует крановщику о необходимости работы рукояткой задатчика3, поскольку в этом случае нагрузка (вес стрелы) ложится на механизм изменения вылета стрелы. Закрытый тран- зистор 15 обесточивает реле 16 и светодиод 26. В результате через контакты 18, 19, 24 реле 16 подключаются соответственно к приводу 5 - выход усилителя 17, к приводу б - задатчик 2 и к первому входу усилителя 17 - выход усилителя 11 сигнала датчика 7, На выходе усилителя 17 появляется напряжение, пропорциональное разности теку- щего усилия в канате 9 и усилия, получаемого от задатчика 13 и имеющего минимальную величину, необходимую для устранения провисания каната. Под влиянием выходного напряжения усилителя 17, воздействующего на привод 5 механизма подъема груза, выбирается слабина или устраняется чрезмерное натяжение каната 9. Крановщик с помощью рукоятки задатчика 2 начинает выбирать стреловой канат 10, уменьшая вылет стрелы 3, а рукоятка задатчика 1 остается в нейтральном положении. С помощью усилителя 17 каната 9 автоматически стравливается при поддержании минимально необходимого натяжения. При переходе стрелы 3 через вертикальное положение нагрузка (вес стрелы) ложится на механизм подъема груза. Напряжение из выходе датчика 14 изменяет полярность на отрицательную, и нуль-орган 20 опрокидывается в противоположное состояние, сопровождающееся появлением на его выходе фиксированного напряжения положительной полярности. Под воздействием этого напряжения гаснет светодиод 25, открывается транзистор 15, запитывается реле 16 и зажигается светодиод 26, сигнализирующий крановш.ику о необходимости дальнейшей работы уже рукояткой задатчика 1. В результате срабатывания реле 16 через контакт 18, 19, 24 подключаются соответственно к приводу 5 - задатчик 1, к приводу 6 вместо задатчика 2 - выход усилителя 17 и k первому входу усилителя 17 - выход усилителя 12 сигнала датчика 8. При этом происходит остановка стрелы 3, в канате 10 автоматически устанавливается минимально необходимое натяжение. Поскольку рукоятка задатчика 2 перестаёт действовать, крановщик должен возвратить ее в нейтральное положение, а дальнейшее перемещение стрелы 3 в транспортное положение осуществлять рукояткой задатчика 1 путем стравливания грузового каната 9.
С помощью усилителя 17 в стреловом канате 10 продолжает поддерживаться минимально необходимое натяжение. Аналогичным образом в обратной последовательности осуществляется перевод стрелы из транспортного положения в рабочее, но при этом механизм изменения вылета стрелы должен работать на страв- ливание, а механизм подъема груза - на выбирание каната.
Таким образом, устройство обеспечивает перевод стрелы из одного положения в другое при минимально необходимых усилиях в грузовом и стреловом канатах. Перевод осуществляется с помощью поочередной работы рукояткой одного из задатчиков и сопровождается необходимой сигнализацией. В результате при переводе стрелы существенно снижаются нагрузки на электроприводы крана и повышается безопасность, надежность и удобство его эксплуатации.
Формула изобретения Устройство для перевода стрелы крана в транспортное положение, содержащее за- датчи и команд подъема груза и изменения вылета бтрелы, подключенные через соот- ветст гующие перекидные контакты пере- ключгтеля режимов работы к управляющим
входам приводов механизмов подъема груза и изменения вылета стрелы, датчики усилия в канатах механизмов подъема груза и изменения вылета стрелы, датчик угла наклона стрелы, задатчик наименьшего усилия в санатах и пороговый элемент, к выходу которого подключено контрольное реле, о т- л и ч« ющееся тем, что, с целью повыше- ния надежности, оно снабжено разностным усилителем, один вход которого
подключен к выходу задатчика наименьшего усилия в канатах, а выход - через одни группы перекидных контактов центрального реле включены последовательно с упо- мянутыми перекидными контактами переключателя режимов работы в цепи управления приводами механизмов подъема груза и изменения вылета стрелы, и нуль-органом, выход которого соединен со входом порогового элемента, причем датчик угла наклона стрелы включает в себя круговой потенциометр и двух полярный источник питания, подключенный к выводам потенциометра, выводом с движка которого образован выход датчика, подключённый к входу нуль-органа, а датчики усилия в канатах подключены через другие группы перекидных контактов контрольного реле к другому входу разностного усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ограничитель грузоподъемности стрелового крана | 1988 |
|
SU1527137A1 |
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ СТРЕЛОВОГО КРАНА | 2014 |
|
RU2571893C1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ И ПОВРЕЖДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2237610C2 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И РЕАЛИЗУЮЩИЙ ЕГО ПРИБОР БЕЗОПАСНОСТИ | 2005 |
|
RU2307061C1 |
| Устройство для управления приводами грузовых лебедок стрелового крана | 1986 |
|
SU1407896A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2457170C1 |
| Устройство для поддержания постоянной высоты подъема грузозахватного органа стрелового крана при изменении вылета стрелы | 1988 |
|
SU1523530A1 |
| СПОСОБ УМЕНЬШЕНИЯ РАСКАЧИВАНИЯ ГРУЗА ПРИ ПОДЪЕМЕ СТРЕЛОВЫМ КРАНОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2422354C1 |
| Устройство для управления электроприводами механизмов подъема стрелового крана | 1990 |
|
SU1761657A1 |
| Указатель длины грузового каната стрелового крана | 1989 |
|
SU1671602A1 |

Использование: в подъёмно-транспортном машиностроении в качестве устройства для перевода стрелы в транспортное положение. Сущность изобретения: устройство содержит задатчик команды подъема, за- датчик изменения вылета стрелы, переключатель режимов работы, механизм подъема груза, механизм изменения вылета стрелы, два датчика усилия в канатах, два усилителя, задатчик наименьшего усилия в канатах, разностный усилителя, датчик угла наклона стрелы, нуль-орган, транзисторный ключ, контрольное реле, два индикатора. 2 ил.
Р. /
| Фальцовая черепица | 0 |
|
SU75A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
