Предлагаемое изобретение относится к гиростабилизаторам, применяющимся в прецизионных системах управления космическими аппаратами относительно их центра масс.
Известны 3-х степенные гироскопические стабилизаторы, у которых маховик выполнен в форме ″гриба″ и гиродвигатель установлен в наружном или внутреннем кардановом подвесе.
Известные гиростабилизаторы обладают следущими недостатками:
1. Гиростабилизаторы с внешним кардановым подвесом 2 имеют неоправдано большой вес, вследствие того, что основание детали подвеса-рамки должны охватить гиродвигатель.
2. В гиростабилизаторах с внутренним кардановым подвесом 3 рамки подвеса имеют относительно малый вес, так как они по своим размерам меньше гиродвигателя, но в этом случае для обеспечения статической балансировки при поворотах оси гиродвигателя от исходного состояния на углы значительной величины (более 8-10°) требуется установка противовеса гиродвигателю в виде дополнительного балансировочного груза. Это вызывает увеличение веса гиростабилизатора и возрастание его габаритных размеров.
Целью данного предлагаемого изобретения является:
1. Улучшение габаритно-весовых характеристик.
2. Повышение точности статической балансировки гиростабилизатора.
Гиростабилизатор генерирует управляющие моменты относительно трех осей, одна из которых (Z) совпадает с осью двигателя-маховика, а две других (Х и У) находятся в плоскости ⊥-й оси Z. Момент относительно оси Z представляет собой динамический момент, развиваемый гиродвигателем (2), который одновременно является источником кинетического момента. Моменты относительно осей Х и У генерируют за счет поворота вектора кинетического момента гиродвигателя относительно этих осей.
Указанная выше цель достигается тем, что гиродвигатель комплектуется из двух двигателей-маховиков, один из которых является источником кинетического момента постоянной величины, а второй, отличающийся от первого значительно меньшим кинетическим моментом, развивает динамический момент, причем, оба двигателя соединены штангой, которая служит внутренней рамкой двухосного карданова подвеса, так что они (двигатели-маховики) уравновешивают друг друга относительно оси поворота штанги во внешней рамке карданова подвеса.
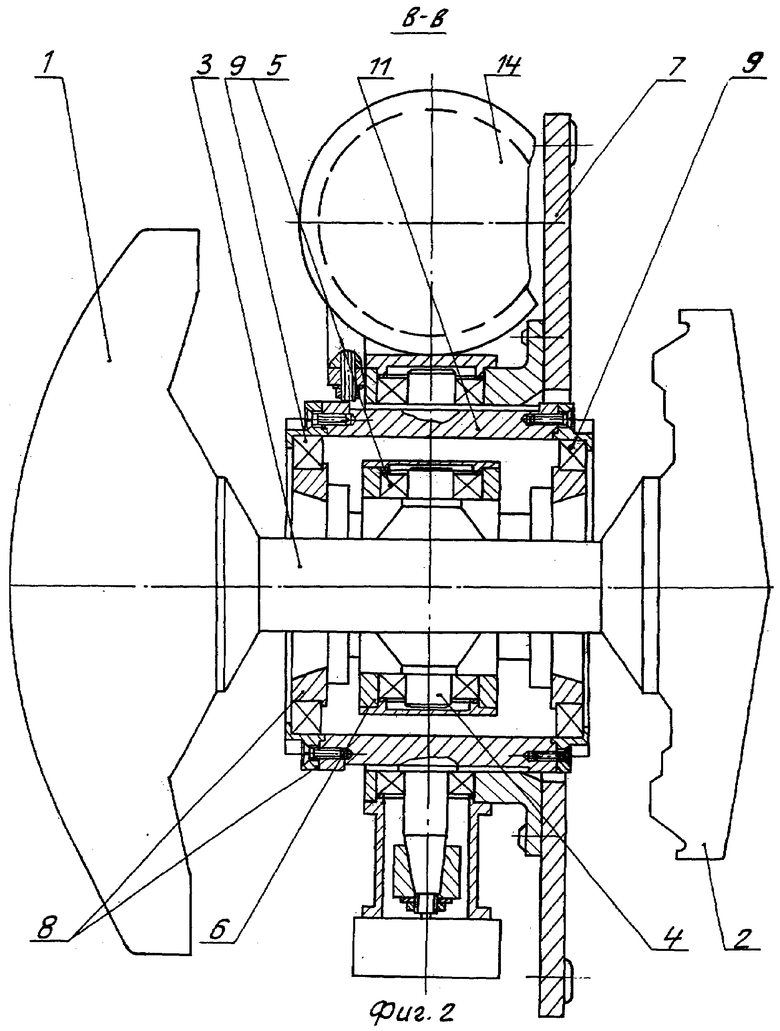
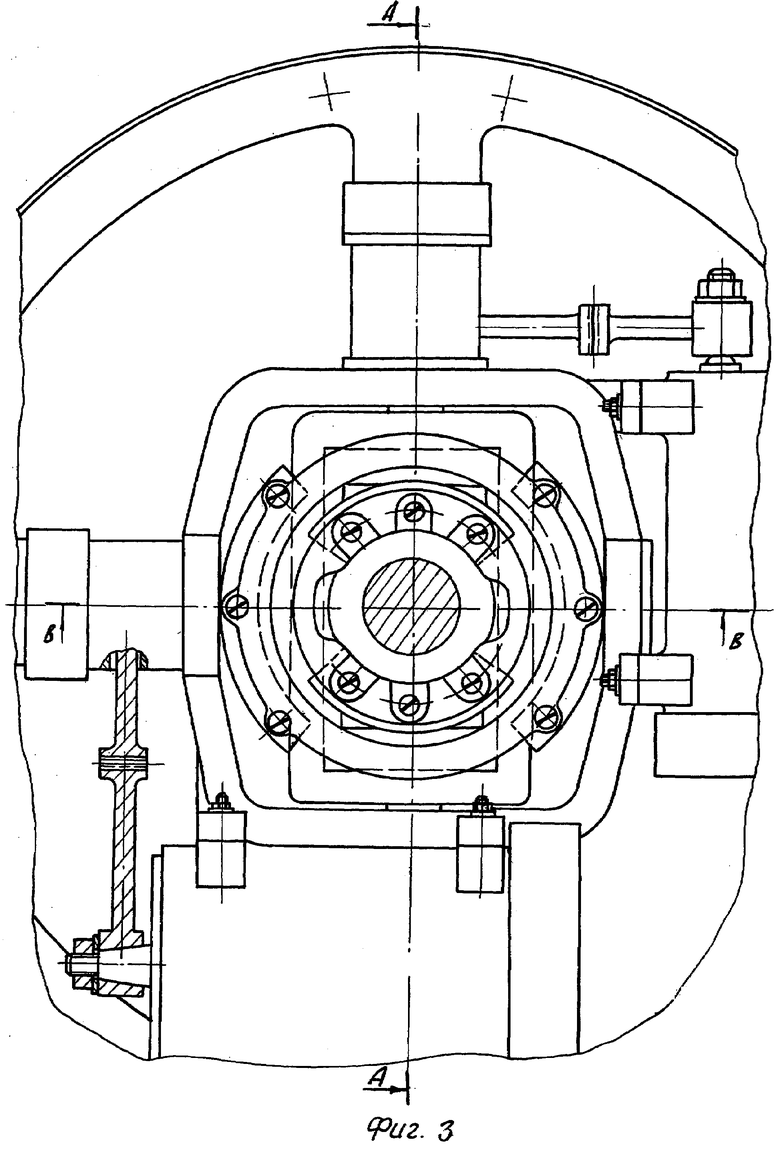
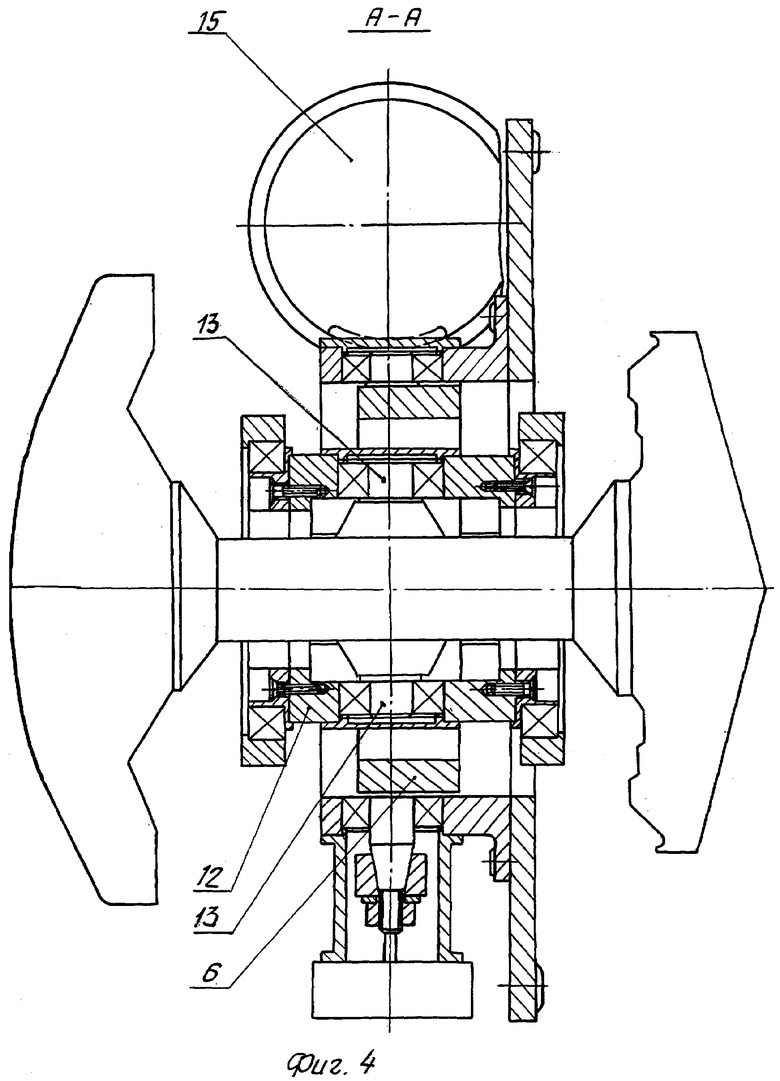
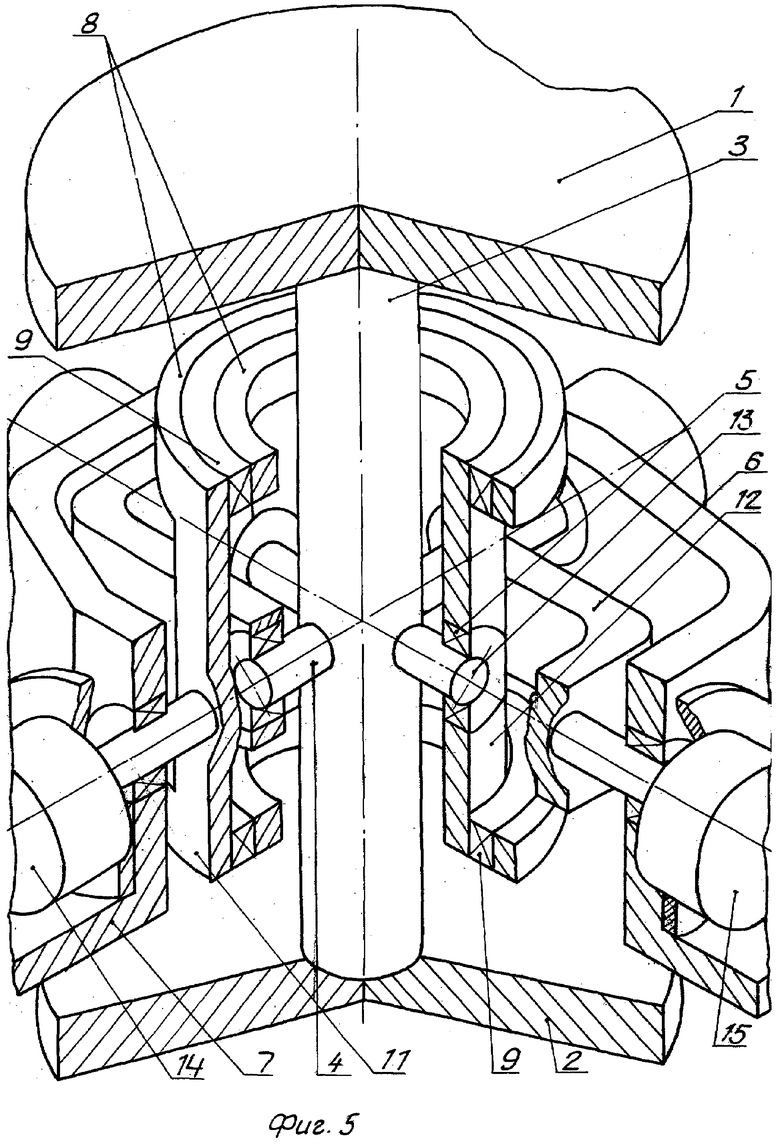
Кинеманическая схема гиростабилизатора приведена на фиг.1, а чертеж его общего вида - на фиг.2, 3, 4, аксонометрическое изображение - на фиг.5.
Гиростабилизатор состоит из гиродвигателя и двухосного карданова подвеса. Гиродвигатель скомплектован из двух двигателей-маховиков 1 и 2 (фиг.1), заключенных в гермокамеры. Двигатели-маховики соединены штангой (3), которая является внутренней рамкой карданова подвеса. Штанга имеет оси (4), которыми с помощью подшипников (5) устанавливается во внешней рамке карданова подвеса (6). Внешняя и внутренняя рамки приводятся в движение с помощью приводов вращения рамок ПВР1 (14) и ПВР2 (15) соответственно. Оба привода размещены на основании (7) (фиг.2 и 3) гиростабилизатора. Привод ПВР1 (14) непосредственно соединен с внешней рамкой, вращение выходной оси привода ПВР2 (15) передается к внутренней рамке через кольцевой бугель (8), который состоит из подшипников (9) и стержней (11) и (12), соединяющих соответственно внешнюю и внутреннюю обоймы подшипников. Посредством оси (13) бугель связан со штангой (3).
По мнению авторов, в предлагаемом гиростабилизаторе оригинальным является то, что гиродвигатель скомплектован из двух двигателей-маховиков (1) и (2), соединенных между собой штангой, которая закреплена на оси (4), установленной своими концами с помощью подшипников (5) во внешней рамке подвеса.
Каждый двигатель-маховик состоит из двигателя и маховика с большим моментом инерции. Один из двигателей-маховиков имеет постоянную скорость вращения и, следовательно, создает постоянный по величине и направлению кинетический момент Н1. Электромагнитный момент Мэм, развиваемый этим двигателем, затрачивается на преодоление момента сопротивления Мс вращению маховика.
Так как двигатель-маховик размещается внутри гермокамеры с низким внутренним давлением (обычно 0,01-1 мм рт.ст.), то указанный момент сопротивления невелик (30/300 гсм). Второй двигатель-маховик создает кинетический момент Н2, значительно меньший, чем первый: H1≫Н2. Обычно Н2≈(0,05-0,1)H1, но электромагнитный момент этого двигателя Мэм≫Мс и его динамический момент Mg=Мэм-Мс является управляющим моментом гиростабилизатора относительно оси Z. Скорость второго двигателя-маховика изменяется от начального значения Ω0 под воздействием динамического момента


где I2 - момент инерции вращающихся частей этого двигателя. Поэтому гиродвигатель развивает переменный по величине кинетический момент Н0=Н1±H2. Т.к. H2≪H1, то изменение Н0 практически не влияет на работу системы управления космического аппарата. Относительно осей Х и У гиростабилизатор генерирует прецессионные управляющие моменты. Например, при повороте с помощью привода ПВР-1 внешней рамки относительно оси Х возникает управляющий момент относительно оси Y, величина которого при малых углах поворота рамки, как известно:  где
где  скорость вращения рамки. Углы поворота рамок подвеса могут достигать 40°-45°, что вполне обеспечивает требования, предъявляемые к подобным приборам.
скорость вращения рамки. Углы поворота рамок подвеса могут достигать 40°-45°, что вполне обеспечивает требования, предъявляемые к подобным приборам.
Из приведенного описания видны преимущества предлагаемой конструкции гиростабилизатора. Во-первых, гиростабилизатор имеет внутренний подвес, его рамки охватывают только штангу, поэтому имеют по сравнению с внешним подвесом небольшой диаметр, а следовательно, малый вес и высокую жесткость, которая обеспечивает точность расположения вектора кинетического момента относительно основания гиростабилизатора.
Во-вторых, так как расстояние от точки крепления штанги (3) к оси (4) до центров масс двигателей-маховиков по величине обратно-пропорциональны массам этих двигателей, то указанные двигатели-маховики уравновешивают друг друга при любых углах поворота рамок. Регулированием удаленности двигателей-маховиков от точки крепления штанги к оси (4), с высокой точностью обеспечивается статическая балансировка без изменения общей массы гиростабилизатора. Для балансировки не требуется дополнительного уравновешивающего груза, как в известных гиростабилизаторах с одним двигателем-маховиком и внутренним подвесом.
В третьих, отказ одного из двигателей-маховиков не приводит к отказу гиростабилизатора в целом, так как второй двигатель продолжает выполнять свои функции.
Практически достигается также некоторая экономия в суммарном весе двигателей-маховиков по сравнению с гиростабилизатором с одним двигателем-маховиком и уравновешивающим грузом в связи с тем, что при двух двигателях-маховиках имеется больше возможностей снижения веса за счет оптимитизации величины рабочих скоростей.
Двигатель, создающий постоянный кинетический момент, имеет небольшую выходную мощность Р=Мс· Ω, где Ω - скорость вращения маховика, а значит и малый вес. Например, при Мс=50 гсм Ω=3000 об/мин выходная мощность Р≈1,5 вт, а вес двигателя (без маховика) 200-300 г. Это позволит повысить рабочую скорость и снизить вес маховика. Двигатель-маховик, создающий управляющий момент, выполняется низкоскоростным, так как он создает небольшой кинетический момент. Следовательно, несмотря на большие моменты, его выходная мощность мала, например, при Мэм=3000 гсм Ω=500 об/мин, мощность двигателя Р2≈15 вт.
В гиростабилизаторе с одним двигателем-маховиком нет указанной свободы действия, так как требуется одновременно высокая скорость для снижения веса маховика и относительно малая мощность двигателя. Например, при Мэм=3000 гсм Ω=3000 об/мин выходная мощность Р≈90 вт. Каждый из приводов вращения рамки (ПВР) состоит из двигателя и редуктора, обычно волнового.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1984 |
|
SU1839933A1 |
| ГИРОСТАБИЛИЗАТОР | 1982 |
|
SU1839899A1 |
| Система гиростабилизации кабины пилотируемого летательного аппарата (ЛА) | 2019 |
|
RU2728221C1 |
| ГИРОСТАБИЛИЗАТОР | 1978 |
|
SU1840380A1 |
| УСТРОЙСТВО ГИРОСКОПИЧЕСКОЙ СТАБИЛИЗАЦИИ ЛИДАРА В ПЛОСКОСТИ ГОРИЗОНТА | 2007 |
|
RU2329468C1 |
| Гироскопический стабилизатор | 1986 |
|
SU1839920A1 |
| Гировертикаль | 1989 |
|
SU1789858A1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436055C2 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
Изобретение относится к гиростабилизаторам, применяющимся в прецизионных системах управления космическими аппаратами относительно их центра масс. Сущность: устройство содержит гиродвигатель, установленный в двухосном кардановом подвесе с приводами и датчиками команд. Кроме того, устройство содержит дополнительный гиродвигатель с регулятором скорости, установленный соосно с первым. При этом дополнительный гиродвигатель связан с первым гиродвигателем штангой, жестко связанной с внутренней рамкой, а центр тяжести гиродвигателей совмещен с центром подвеса. Технический результат: повышение точности статической балансировки гиродвигателя при больших углах поворота рамок. 5 ил.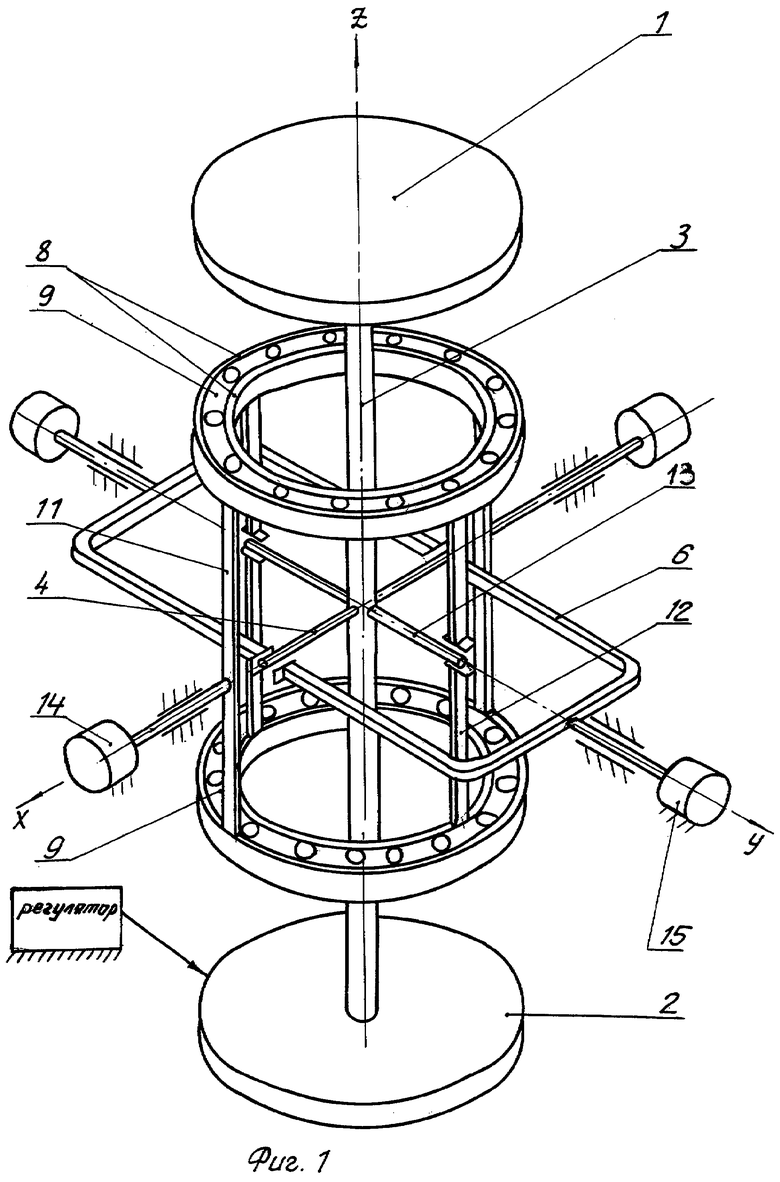
Гиростабилизатор, содержащий гиродвигатель в двухосном кардановом подвесе с приводами и датчиками команд, отличающийся тем, что, с целью повышения точности статической балансировки гиродвигателя при больших углах поворота рамок, в него введен дополнительный гиродвигатель с регулятором скорости, связанный с первым гиродвигателем штангой, жестко связанной с внутренней рамкой, при этом дополнительный гиродвигатель установлен соосно с первым, а центр тяжести гиродвигателей совмещен с центром подвеса.

