ел
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выбора маршрутов следования отцепов на сортировочной горке | 1977 |
|
SU686924A1 |
| Устройство задания маршрутов в горочной автоматической централизации | 1979 |
|
SU854793A1 |
| Устройство для управления маневровой работой на сортировочной горке | 1980 |
|
SU958191A1 |
| Комплексная система автоматизации управления сортировочным процессом (КСАУ СП) | 2020 |
|
RU2737815C1 |
| Устройство для управления технологическим процессом роспуска составов на сортировочной горке | 1981 |
|
SU1073146A1 |
| Тренажерный комплекс оперативного персонала сортировочной горки | 2023 |
|
RU2810931C1 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| Устройство для переработки оперативнотехнологической информации на сортировочной горке | 1976 |
|
SU650867A1 |
| ГОРОЧНОЕ ПРОГРАММНО-ЗАДАЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2157773C2 |
| Устройство для автоматической установки маршрутов отцепам при параллельном роспуске составов | 1981 |
|
SU1047759A1 |
Использование: для автоматического управления маневровыми передвижениями на сортировочной горке. Сущность, изобретения: устройство содержит блок выбора маршрута следования отцепа на сортировочной горке 1, блок корректировки программы роспуска 2, накопитель информации 3, блок ввода .информации 4, дешифратор 5, блок индикации 6, программно-задающий блок 7, блок формирования команд управления маневровым локомотивом 8, блок контроля выполнения маневров 9, блок развязки 10. 1 ил.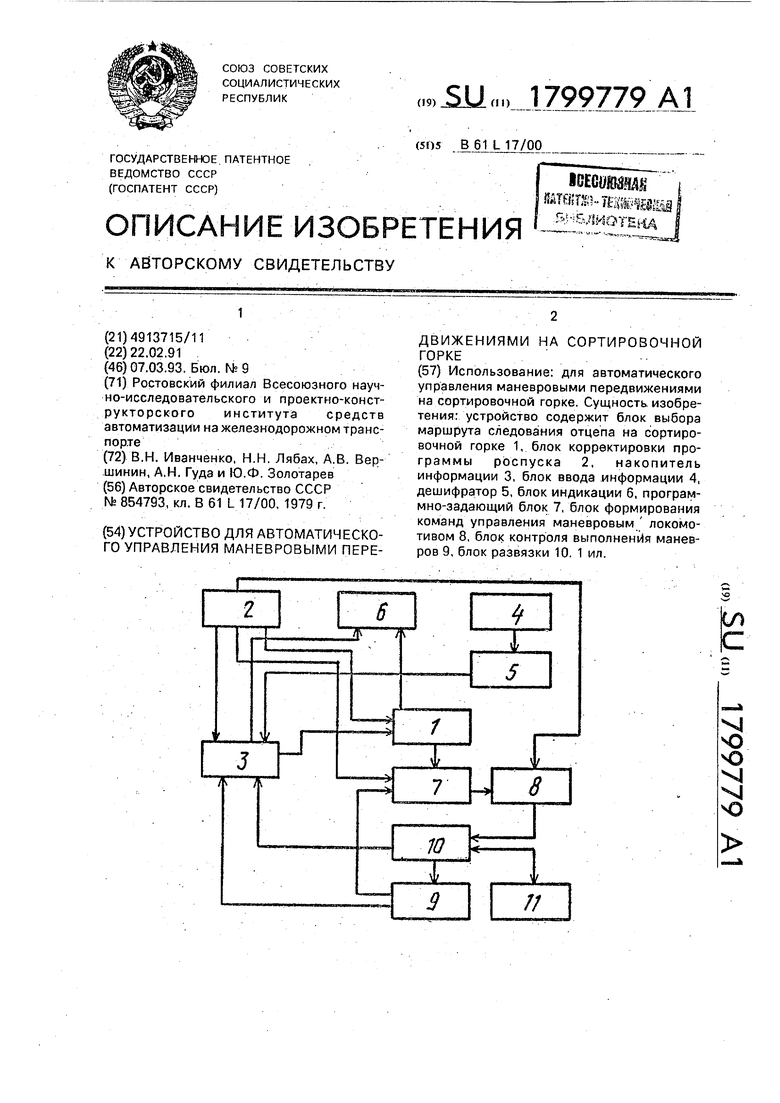
4 О Ю Ч XI Ю
Изобретение относится.к устройствам автоматики и телемеханики на железнодорожном транспорте, в частности к устройствам, предназначенным для автоматизации, управления технологическими процессами на сортировочной горке.
Цель изобретения - расширение функ- циональ ных возможностей и повышение эффективности управления за счет сокращения времени маневров. Автоматизация управления маневровыми передвижениями улучшит условия труда оперативно-диспетчерского персонала,
На чертеже представлена схема устройства. : ;
Устройство для автоматического управ- л ения маневровыми передвижения на сортировочной горке содержит блок 1 выбора маршрута следования отцепа на сортировочной горке, блок 2 корректировки программы роспуска, соединенное со входами пульта управления и блока..3 накопления информации. Выход блока 4 ввода информации подключен к дешифратору 5, выход которого подключен к блоку 3 накопителя информации. Блок б индикации, выполненный, например, в виде терминала, связан с блоком 1 и блоком 3. Выход программно-задающего блока 7 подключен к блоку 8 формирования команд управления маневровым локомотивом.
Выходы блока 9 контроля выполнения маневров подключены к входам программ- ного-задающего блока 7 и блоку 3 накопления информации. Блок 10 развязки связан со стрелочными исполнительными блоками
Выход блока 8 управления маневровым локомотивом подключен к входу блока 10 связи с автоматизированной системой управления роспуском составов, а вход соединен с пультом управления 2, выход которого соединен с блоком 3 накопления . информации о требующихся маневрах.
Устройство для автоматического управления маневровыми, передвижениями на сортировочной горке работает следующим /образом. Во время роспуска составов через блок ТО информация поступает в блок 3, а также месте назначения - подгорочного пути, где они должны находится. Информация через блок 6 поступает оператору. После роспуска одного или нескольких составов в перерыве между роспусками составов оператор сортировочной горки, руководствуясь данными, полученными через блок 6 определяет приоритет маневровых операций (перестановка чужаков, устранение ситуаций нет прохода и т.п.) и вводит с блока 2
команду в блок 1 на выполнение расчета плана маневров, При необходимости опера- тор-вводит также в.блок 1 и блок 8 информация о местоположении маневрового
локомотива. Оператор может ввести вручную данные о местоположении чужаков, других сбойных ситуациях, требующих маневров, с блока 2. Для ускорения процесса ввода зтой информации оператор может использовать также ввод информации через блок 4 и дешифратор 5. После ввода в блоке 1 производится расчет оптимального по критерию минимума времени, с учетом введенных приорите-гов, плана маневровой работы для нормализации ситуаций на сортировочной горке и.подгорочном парке. Рассчитанный в блоке 1 план маневров через блок 6 выводится оператору сортировочной .горки и поступает в
программно-задающий б/fok 7. При необходимости оператор через блок 2 управления может скорректировать рассчитанный план. При согласии с планом или посл е его кор- ректировки оператор вводит сигнал о нача ле маневров. Из программно-задающего
блока 7 в блок 8 поступает задание на маневровые операции, к примеру, сделать заезд1 на оди.н из маневровых путей и переставить отцеп с него на другой путь..В
блоке 8 вырабатываются маршруты для маневрового локомотива и передается через ;блок ТО стрелочно-исполнительным блоком 11, Блок 9 контролирует ход выполнения маневровой операции, основываясь на поступающей из блока 10 информации о ходе перемещения маневрового локомотива. После устранения одной из ситуаций на сортировочной горке, требующей, маневров, в блок 3 корректируется информация о требу,ющих маневрах, осуществляется переход к следующей операции и так до полного выполнения всех необходимых маневров. Ход выполнения плана маневров доводится до оператора через табло . 6 оперативной информации. Во время работы оператор имеет возможность приостановить на время работу устройства путем введения блок 2 соответствующей команды, Если после этого роспуска или маневров с неавтоматическим
управлением, не было выполнения плана маневров, после возобновлен работа продолжается с точки останова. Если во время прерывания работы устройства осуществляется роспуск составов,.то возникшие ситуацйи на.горке, требующие маневров, добавляются в программно-задающий блок 7 к имеющейся там информации. После окончания роспуска составов работы устройства начинается сначала - с задания
оператором приоритетов маневровым операциям и расчета нового плана маневров.
Формула изобретения Устройство для автоматического управления маневровыми передвижениями на сор- ; тировочной горке, содержащее блок ввода информации, связанный через дешифратор с одним из входов накопителя информации, один из выходо которого подключен к од- . ному из входов блогга индикации, блок формирования команд управления, подключенный к стрелочным исполнительным блокам, от л и ч а ю ще ее я тем, что, с целью повышения надежности, оно снабжено блоком контроля выполнения маневров, блоком развязки, программно-задающим блоком, блоком корректировки программы роспуска составов и.блоком выбора маршрута следования отцепа на сортировочной горке, первый и второй выходы которого подключены соответственно к второму входу блока индикации и входу программно-за0
5
0
дающего блока, а первый и второй входы соединены соответственно с вторым, выходом накопителя информации и первым выходом блока корректировки программы роспуска составов, второй выход которого подключен к второму выходу накопителя ин- .формации, третий выход - к первому входу программно-задающего блока, а четвертый выход - к первому входу блока формирования команд управления, второй вход которого подключенк выходу программно-задающего блока, а выход - к персому входу блока развязки, второй выход и первый вход которого подключены соответственно к входам и выходам стрелочных исполнительных блоков, второй выход блока развязки соединен с первым, .входом блока контроля выполнения маневров, а третий выход- к третьему входу накопителя информации, четвертый вход которого соединен с третьим входом блока выбора маршрута следования отцепа на сортировочной горке.
| Устройство задания маршрутов в горочной автоматической централизации | 1979 |
|
SU854793A1 |
