4 Ю 00
Ј
О
Изобретение относится к обработке измерительной информации, может быть использовано в геодезических трилатера- ционных системах для преобразования пространственных координат и является усовершенствованием известного устройства по авт.св. № 1513445.
Известен преобразователь координат, который содержит блок управления, блок постоянной памяти, сумматоры координат, задающий генератор, арифметический блок, схему сравнения, ключевую схему, три регистра координат и мультиплексор, причем выходы блока управления соединены с входами управления трех регистров координат, ключевой схемы и мультиплексора, первый и второй входы арифметического блока соединены с первой и второй группами входных шин, третий вход арифметического блока соединен с группой выходных шин второго регистра координат и группой входных шин ключевой схемы. Первая группа выходных шин арифметического блока соединена через регистр координат с первым входом мультиплексора, второй вход которого соединен с третьей группой входных шин преобразователя, а выход является входом второго регистра координат. Вторая выходная шина арифметического блока через третий регистр координат соединена с первым входом схемы сравнения, второй вход которой подключен к выходу блока постоянной памяти. Кроме того, выход схемы сравнения соединен с блоком управления, а выход ключевой схемы образует выходную шину преобразователя.
Арифметический блок содержит блок определения расстояний и производных, блок обращения, формирователь невязок, блок произведений, блок ошибки, сумматор координат и три группы входных шин, две группы выходных шин, причем первая группа входных шин соединена с первым входом формирователя невязок, вторая и третья группы входных шин соединены соответственно с первым и вторым входами блока определения расстояний и производных, первая группа выходных шин которого подключена к второму входу формирователя невязок, выход которого является первым входом блока произведений, второй вход которого через блок обращения подключен к второй группе выходных шин блока определения расстояний и производных, а выход - через блок ошибки к второй выходной шине, а также непосредственно к второму входу сумматора координат. Первый вход сумматора координат соединен с третьей группой входных шин, а выход образует первую выходную шину.
Блок управления содержит задающий генератор, два ждущих мультивибратора, два RS-триггера, синхронизирующий RS- триггер, два элемента И, элемент И-НЕ,
причем единичный вход первого RS-триггера соединен с входом запуска. Выход задающего генератора соединен с входом первого ждущего мультивибратора и со счетным входом синхронизирующего RS0 триггера, единичный вход которого подключен к прямому выходу первого RS-триггера, а прямой выход - к входу второго ждущего мультивибратора и к одному из входов первого элемента И, второй вход которого
5 соединен с выходом первого ждущего мультивибратора. Выход первого элемента И через элемент И-НЕ соединен с первым выходом управления, а также с одним из входов второго элемента И, второй вход ко0 торого является выходом второго ждущего мультивибратора и соединен с вторым выходом управления, а выход соединен с третьим выходом управления. Кроме того, вход управления блока управления соеди5 нен с входами установки в ноль первого и синхронизируемого RS-триггера, а также с единичным входом второго RS-триггера, выход которого образует четвертый выход управления.
0 Блок определения расстояний и производных содержит две группы входных шин, три идентичных формирователя производных и две группы выходных шин, причем входы первой, второй и третьей координаты
5 1-й (I 1,3) опорной точки преобразователя (первая группа входных шин блока определения расстояний и производных) соединены с входами соответственно с перв ого по третий первой группы входов соответствую0 щего 1-го (I 1.3) формирователя производных, первый, второй и третий входы второй группы входов первого, второго и третьего формирователей производных объединены между собой соответственно с первого по
5 третий и образуют вторую группу входных шин (из трех шин с первой по третью соответственно) блока определения расстояний и производных, выходы расстояний первого, второго и третьего формирователей проиЗ0 водных соединены с первой группой выходов блока определения расстояний и производных, выходы первых, вторых и третьих частных производных первого, второго и третьего формирователей производных соединены с
5 второй группой выходов блока определения расстояний и производных.
Недостатком известного устройства являются ограниченные функциональные возможности, так как он выполняет определение пространственного положения точки
только по трем расстояниям до нее относительно трех опорных точек с пространственными прямоугольными координатами и не может быть использован для определения пространственного местоположения точки пересечения гиперболических поверхностей положения, задаваемых тремя разностями расстояний относительно четырех опорных точек с известными координатами. Это ограничивает область применения устройства.
Целью изобретения является расширение класса решаемых задач за счет возможности вычисления координат точки пересечения трех двухполостных гиперболоидов вращения, задаваемых разностями расстояний относительно четырех опорных точек с известными координатами.
Поставленная цель достигается тем, что в цифровом преобразователе координат блок определения расстояний и производных дополнительно содержит четвертый формирователь производных и двенадцать вычитателей, причем входы первой, второй и третьей координаты четвертой опорной точки преобразователя соединены с входами соответственно с первого по третий первой группы входов четвертого формирователя производных, первый, второй и третий входы второй группы входов которого объединены соответственно с первого по третий входами второй группы входов первого, второго и третьего формирователей производных, выходы расстояний которых соединены с входами уменьшаемых соответственно первого, второго и третьего вычитателей, входы вычитаемых которых соединены с выходом расстояния четвертого формирователя производных, выходы первых частных производных первого, второго и третьего формирователей производных соединены с выходами уменьшаемых вычитателей соответственно с четвертого по шестой, входы вычитаемых которых соединены с выходом первой частной производной четвертого формирователя производных, выходы вторых частных производных первого, второго и третьего формирователей производных соединены с входами уменьшаемых вычитателей соответственно с седьмого по девятый, входы вычитаемых которых соединены с выходом второй частной производной четвертого формирователя производных, выходы третьих частных производных первого, второго и третьего формирователей производных соединены с входами уменьшаемых вычитателей соответственно с десятого по двенадцатый, входы вычитаемых которых объединены и соединены с выходами третьей частной производной четвертого
формирователя производных, выходы вычитателей с первого по третий соединены с первой группой выходов блока определения расстояний и производных, выходы вычитателей с четвертого по двенадцатый соедине- ны со второй группой выходов блока определения расстояний и производных.
Блок обращения содержит группу из девяти входных шин, три идентичных блока
0 дополнений, двенадцать умножителей, сумматор, блок вычисления обратной величины, группу из девяти выходных шин, причем порядок соединения входных шин и входов каждого блока дополнений показан в табл.1
5 в виде .
Кроме того, первая, вторая и третья входные шины соединены с входами первых сомножителей первого, второго и третьего умножителей соответственно, входы вторых
0 сомножителей которых соединены с первыми выходами первого, второго и третьего блоков дополнений, а выходы соединены с входами сумматора с первого по третий соответственно, выход которого через блок
5 вычисления обратной величины подключен к входам вторых сомножителей оставшихся девяти умножителей, причем первый, второй и третий выходы первого, второго и третьего блоков дополнений соединены с
0 входами первых сомножителей оставшихся девяти умножителей, выходы которых объединены в группу выходных шин.
Формирователь невязок содержит две группы входных шин, три идентичных вычи5 тателя и группу выходных шин, причем входы уменьшаемых первого, второго и третьего вычитателей соединены с первой, второй и третьей входными шинами первой группы, входы вычитаемых первого, второго
0 и третьего вычитателей соединены с первой, второй и третьей входными шинами второй группы, а выходы объединены в группу выходных шин.
Блок произведений содержит две груп5 пы входных шин, девять умножителей, три сумматора, группу выходных шин, причем каждая из входных шин первой группы соединена с входом первого сомножителя соответствующего ей по номеру умножителя,
0 первая входная шина второй группы входных шин соединен с входами вторых сомножителей первого, четвертого и седьмого умножителей, вторая входная шина второй группы соединена с входами вторых сомно5 жителей второго, пятого и восьмого умножителей, третья входная шина второй группы входных шин соединена с входами вторых сомножителей третьего, шестого и девятого умножителей, выходы первого, второго и третьего умножителей соединены с входами
соответственно с первого по третий первого сумматора, выходы четвертого, пятого и шестого умножителей соединены с входами соответственно с первого по третий второго сумматора, выходы седьмого, восьмого и девятого умножителей соединены с входами соответственно с первого по третий третьего сумматора, а выходы первого, второго и третьего сумматоров объединены в группу выходных шин.
Блок ошибки содержит группу из трех входных шин, три умножителя, сумматор и выходную шину, причем первая, вторая и третья входные шины соединены с входами первого и второго сомножителей первого, второго и третьего умножителей соответственно, выходы которых подключены ко входам с первого по третий сумматора, выход которого образует выходную шину.
Формирователь производных содержит две группы изтрех входных шин каждая,три вычитателя, шесть умножителей, сумматор, блок извлечения квадратного корня, блок вычисления обратной величины и две группы выходных шин, причем первая, вторая и третья шины первой группы входных шин соединены соответственно с входами вычитаемых первого, второго и третьего вычита- телей, входы уменьшаемых которых соединены соот оетственно с первой, второй и,третьей шинами второй группы входных шин, выходы первого, второго и третьего вычитэтелей подключены к входам первого и второго сомножителей первого, второго и третьего умножителей соответственно, а также к входам первых сомножителей четвертого, пятого и шестого умножителей, вы- ходы первого, второго и третьего умножителей соединены соответственно с входами с первого по третий сумматора, выход которого подключен ко входу блока извлечения квадратного корня, выход которого является выходной шиной первой группы, а также соединен через блок вычисления обратной величины с входами вторых сомножителей четвертого, пятого и шестого умножителей, выходы которых образуют вторую группу выходных шин.
и
Блок дополнений содержит группу входных шин, шесть умножителей, три вычитателя, группу выходных шин, причем порядок соединения входных шин и входов умножителей показан в табл.2 в виде .
Кроме того, выходы первого и второго умножителей соединены соответст- ренно с входами уменьшаемого и вычитаемого первого вычитателя, выходы третьего и четвертого умножителей соединены соответственно с входами уменьшаемого и вычитаемого второго вычитателя, а выходы пятого и шестого умножителей соответственно с входами уменьшаемого и вычитаемого третьего вычитателя, выходы
вычитателей образуют группу выходных шин.
Предлагаемый преобразователь координат позволяет осуществлять определение пространственного местоположения
(х, у, z) точки пересечения трех двухполост- ных гиперболоидов вращения, задаваемых измеренными разностями расстояний (Qi4 , Q24 , Оз4 ) относительно четырех опорных точек с известными прямоугольными координатами (первой - с координатами xi, yi, zi, второй - с координатами Х2, У2, 2.2, третьей - с координатами хз, уз, гз, четвертой - с координатами , уз, ZA.
Преобразователь координат реализует известный итерационный алгоритм Ньюто- ра-Гаусса, решение которого находится по следующим формулам:
25
30
35
40 45
Yk+1 - Xk + AXk,
где X ||х, у, - вектор искомых координат точки;
k - номер шага итерационного процеса уточнения решения;
Xk вектор координат точки, полученной на k-м шаге итерационного процесса (на первом шаге используются прибли- известные значения координат
X Цхо, Уо, Zof,
Ak-м - вектор координат точки, определяемый на (к+1)-м шаге итерационного процесса; , , (Xk)Q -F(Xk)H|Axk,Ayk,AzkHT вектор уточняющих поправок координат (вектор ошибок);
Q . U24, - вектор заданных (или измеренных) разностей расстояний;
%)
50
Q,4(xk
Q44(Xk)
Q(xk)
Rt(xk)-R4()Tk) Mxk)-R4(xk)
)
5
- вектор вычисленных шаге процесса разностей расстояний: Ri(Xk) -J(xk-xi) + (yk-yif + (zk-zir. (I 1.4) - вычисленное на k-м шаге процесса расстояние между искомой и i-й опорной точками;
A(Xk) - матрица частных производных измеряемых параметров по определяемым, элементы которой определяются на k-м шаге процесса по формуле
М7„1Итерационный процесс завершается на L-м шаге в том случае, если норма вектора ошибок (уточняющих поправок) Л, не превышает заданного порога точности вычислений еп , т.е.
|| EL - AXi ЕП .
где ЕП - заранее заданная величина, выбранная из условий заданной точности вычислений и заданной разрядности чисел.
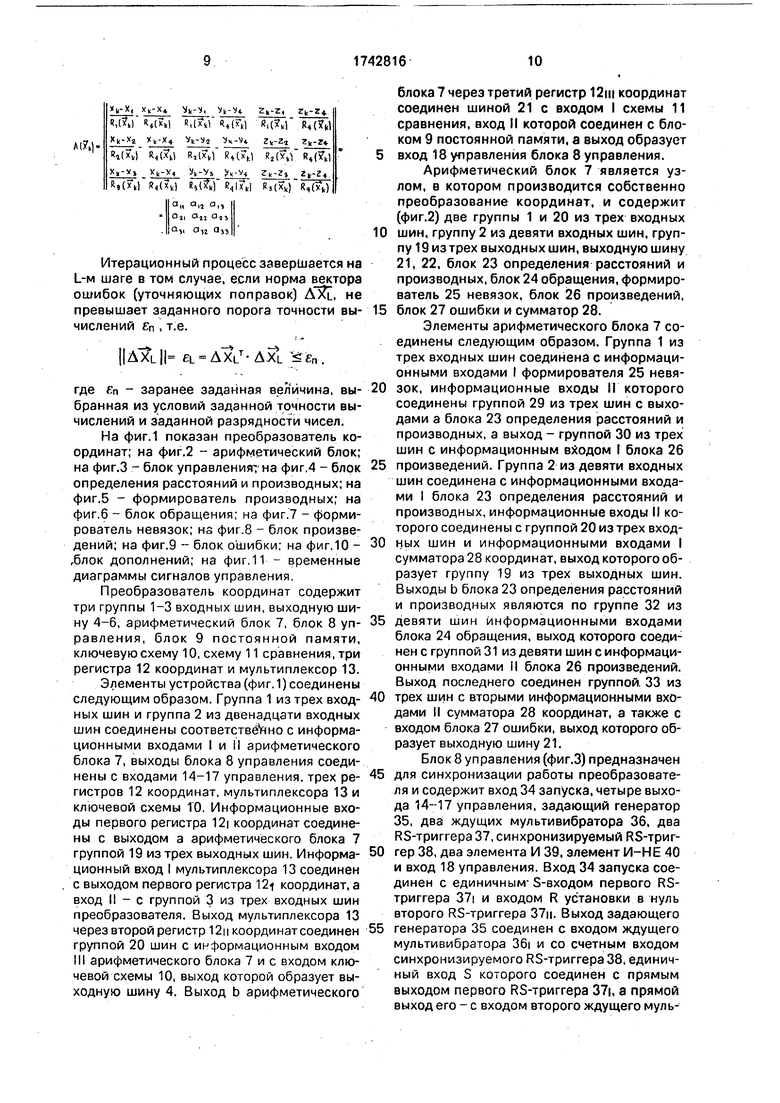
На фиг.1 показан преобразователь координат; на фиг.2 - арифметический блок; на фиг.З - блок управления на фиг.4 - блок определения расстояний и производных; на фиг.5 - формирователь производных; на фиг.6 - блок обращения; на фиг.7 - формирователь невязок; нз фиг.8 - блок произведений; на фиг.9 - блок ошибки; на фиг.10 - ДЗлок дополнений; на фиг. 11 - временные диаграммы сигналов управления.
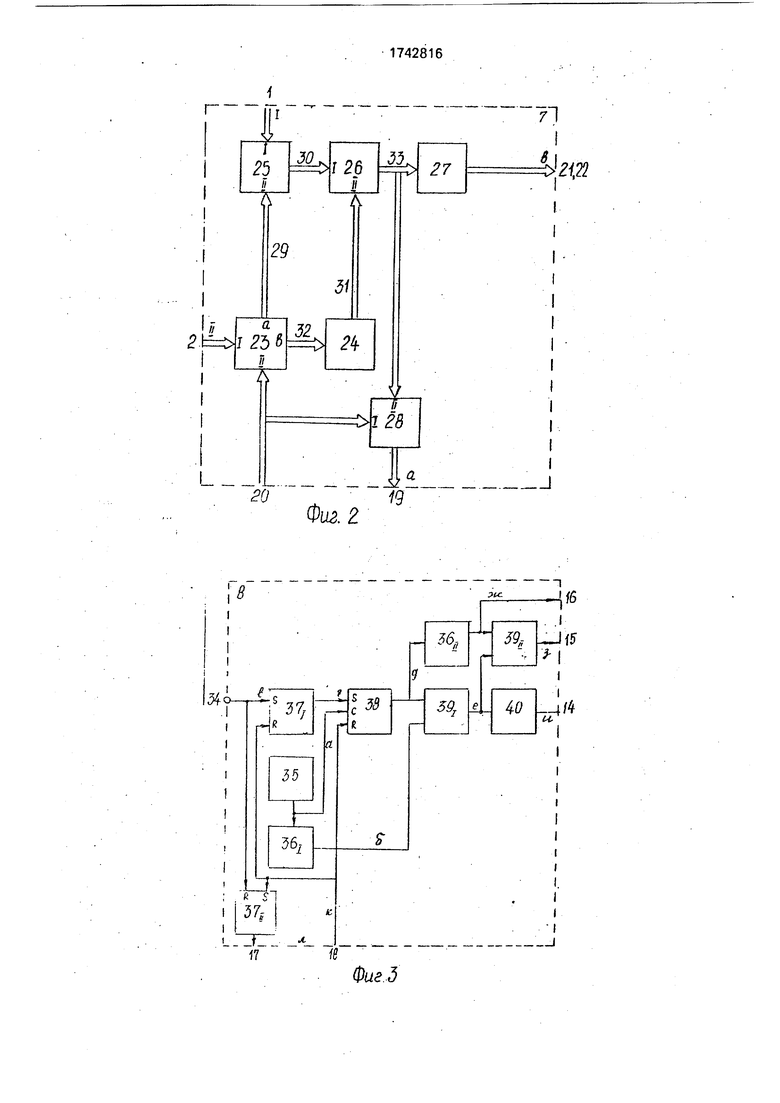
Преобразователь координат содержит три группы 1-3 входных шин, выходную шину 4-6, арифметический блок 7, блок 8 управления, блок 9 постоянной памяти, ключевую схему 10, схему 11 сравнения, три регистра 12 координат и мультиплексор 13.
Элементы устройства (фиг. 1) соединены следующим образом. Группа 1 из трех входных шин и группа 2 из двенадцати входных шин соединены соответственно с информационными входами I и II арифметического блока 7, выходы блока 8 управления соединены с входами 14-17 управления, трех регистров 12 координат, мультиплексора 13 и ключевой схемы 10. Информационные входы первого регистра 12| координат соединены с выходом а арифметического блока 7 группой 19 из трех выходных шин. Информационный вход I мультиплексора 13 соединен с выходом первого регистра 12t координат, а вход II - с группой 3 из трех входных шин преобразователя. Выход мультиплексора 13 через второй регистр 12ц координат соединен группой 20 шин с информационным входом III арифметического блока 7 и с входом ключевой схемы 10, выход которой образует выходную шину 4. Выход b арифметического
блока 7 через третий регистр 12ш координат соединен шиной 21 с входом I схемы 11 сравнения, вход II которой соединен с блоком 9 постоянной памяти, а выход образует
вход 18 управления блока 8 управления.
Арифметический блок 7 является узлом, в котором производится собственно преобразование координат, и содержит (фиг.2) две группы 1 и 20 из трех входных
0 шин, группу 2 из девяти входных шин, группу 19 из трех выходных шин, выходную шину 21, 22, блок 23 определения расстояний и производных, блок 24 обращения, формирователь 25 невязок, блок 26 произведений,
5 блок 27 ошибки и сумматор 28.
Элементы арифметического блока 7 соединены следующим образом. Группа 1 из трех входных шин соединена с информационными входами I формирователя 25 невя0 зок, информационные входы И которого соединены группой 29 из трех шин с выходами а блока 23 определения расстояний и производных, а выход - группой 30 из трех шин с информационным входом I блока 26
5 произведений. Группа 2 из девяти входных шин соединена с информационными входами I блока 23 определения расстояний и производных, информационные входы II которого соединены с группой 20 из трех вход0 ных шин и информационными входами I сумматора 28 координат, выход которого образует группу 19 из трех выходных шин. Выходы b блока 23 определения расстояний и производных являются по группе 32 из
5 девяти шин информационными входами блока 24 обращения, выход которого соединен с группой 31 из девяти шин с информационными входами II блока 26 произведений. Выход последнего соединен группой 33 из
0 трех шин с вторыми информационными входами II сумматора 28 координат, а также с входом блока 27 ошибки, выход которого образует выходную шину 21.
Блок 8 управления (фиг.З) предназначен
5 для синхронизации работы преобразователя и содержит вход 34 запуска, четыре выхода 14-17 управления, задающий генератор 35, два ждущих мультивибратора 36, два RS-триггера 37, синхронизируемый RS-триг0 гер 38, два элемента И 39. элемент И-НЕ 40 и вход 18 управления. Вход 34 запуска соединен с единичным-S-входом первого RS- триггера 37| и входом R установки в нуль второго RS-триггера 37ц. Выход задающего
5 генератора 35 соединен с входом ждущего мультивибратора 36i и со счетным входом синхронизируемого RS-триггера 38, единичный вход S которого соединен с прямым выходом первого RS-триггера 37|, а прямой выход его - с входом второго ждущего мультивибратора 36м и одним из входов первого элемента И 39|, второй вход которого подключен к выходу первого ждущего мультивибратора 36|. Выход первого элемента И 39| соединен с одним из входов второго элемента И 39|, а также через элемент И-НЕ 40 с выходом 14 управления, Выход второго ждущего мультивибратора 36ц является выходом 16 управления, а также соединен с входом второго элемента И 39ц, выход которого является выходом 15 управления. Вход 18 управления соединен с входами R установки в нуль первого RS-триггера 37| и синхронизируемого RS-триггера 38, а также с единичным S-входом второго RS-триггера 37ц, выход которого образует выход 17 управления.
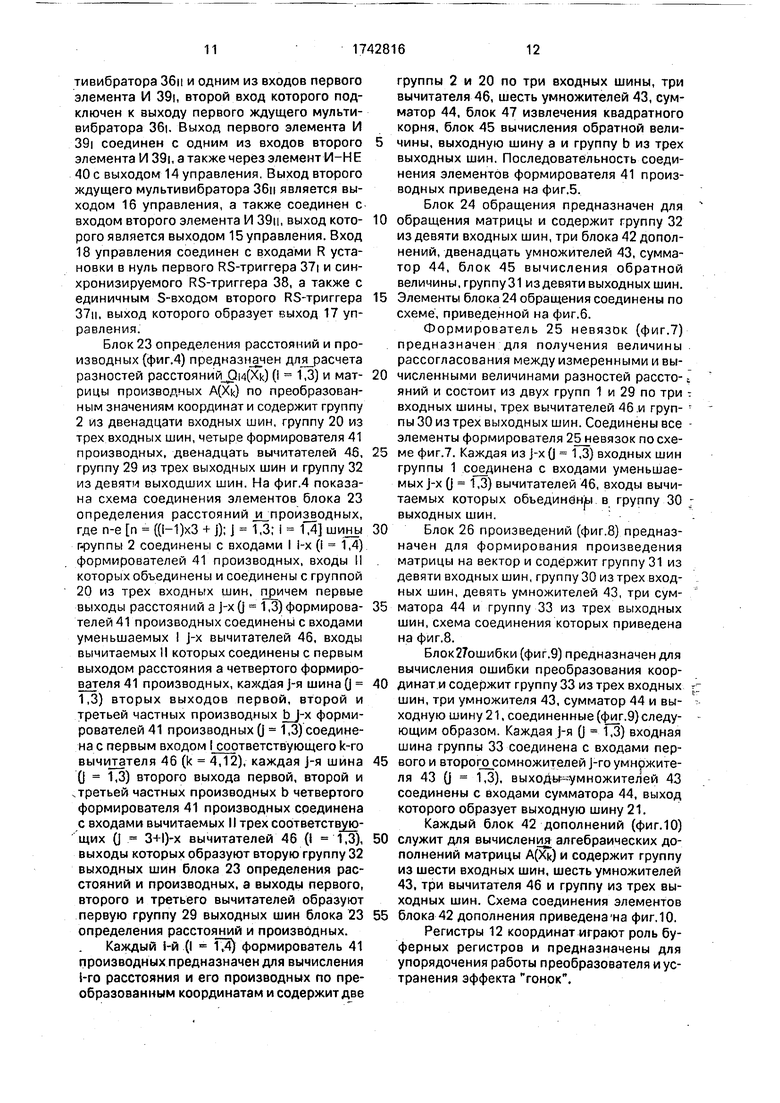
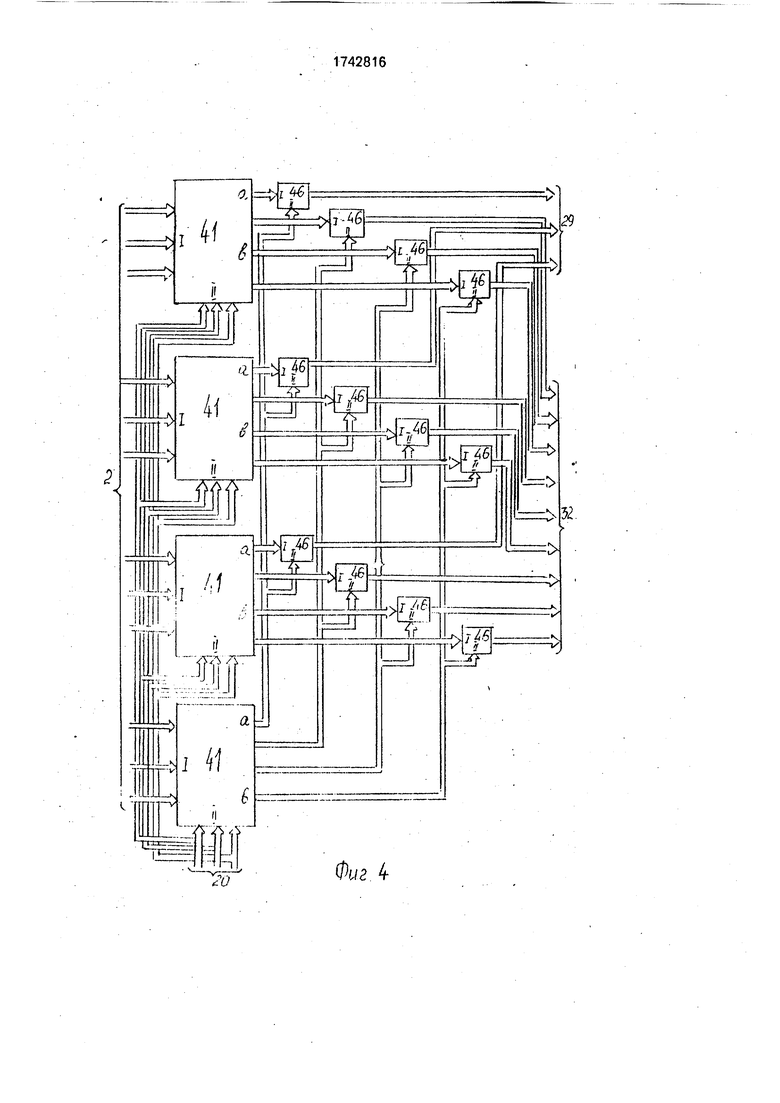
Блок 23 определения расстояний и производных (фиг.4) предназначен дляуэасчета разностей расстояний Хк) (I 1,3) и матрицы производных A(Xk) по преобразованным значениям координат и содержит группу 2 из двенадцати входных шин, группу 20 из трех входных шин, четыре формирователя 41 производных, двенадцать вычитателей 46, группу 29 из трех выходных шин и группу 32 из девяти выходших шин. На фиг.4 показана схема соединения элементов блока 23 определения расстояний и производных, где n-е п {(1-1 )хЗ + j); J 1,3; I 1,4 шины г-руппы 2 соединены с входами I 1-х (I 1,4) формирователей 41 производных, входы II которых объединены и соединены с группой 20 из трех входных шин, гуэичем первые выходы расстояний a j-x Q 1,3) формирователей 41 производных соединены с входами уменьшаемых j-x вычитателей 46, входы вычитаемых II которых соединены с первым выходом расстояния а четвертого формирователя 41 производных, каждая j-я шина (j 1,3) вторых выходов первой, второй и третьей частных производных р J-x формирователей 41 производных (j 1,3) соединена с первым входом соответствующего k-ro вычитателя 46 (к 4,12), каждая j-я шина О 1,3) второго выхода первой, второй и .третьей частных производных b четвертого формирователя 41 производных соединена с входами вычитаемых II трех соответствующих (J 3-И)-х вычитателей 46 (I 1,3), выходы которых образуют вторую группу 32 выходных шин блока 23 определения расстояний и производных, а выходы первого, второго и третьего вычитателей образуют первую группу 29 выходных шин блока 23 определения расстояний и производных.
Каждый 1-й (I Ti4) формирователь 41 производных предназначен для вычисления 1-го расстояния и его производных по преобразованным координатам и содержит две
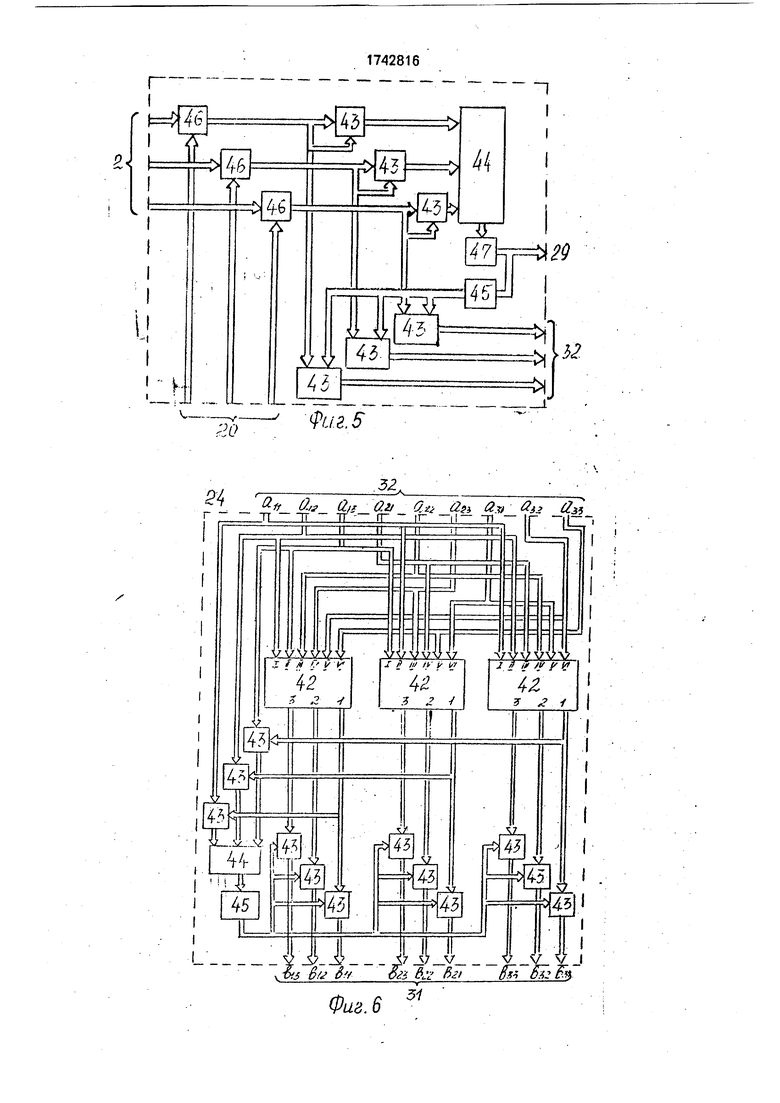
группы 2 и 20 по три входных шины, три вычитателя 46, шесть умножителей 43, сумматор 44, блок 47 извлечения квадратного корня, блок 45 вычисления обратной величины, выходную шину а и группу b из трех выходных шин. Последовательность соединения элементов формирователя 41 производных приведена на фиг.5.
Блок 24 обращения предназначен для
обращения матрицы и содержит группу 32 из девяти входных шин, три блока 42 дополнений, двенадцать умножителей 43, сумматор 44, блок 45 вычисления обратной величины, группу 31 из девяти выходных шин.
Элементы блока 24 обращения соединены по схеме, приведенной на фиг.6.
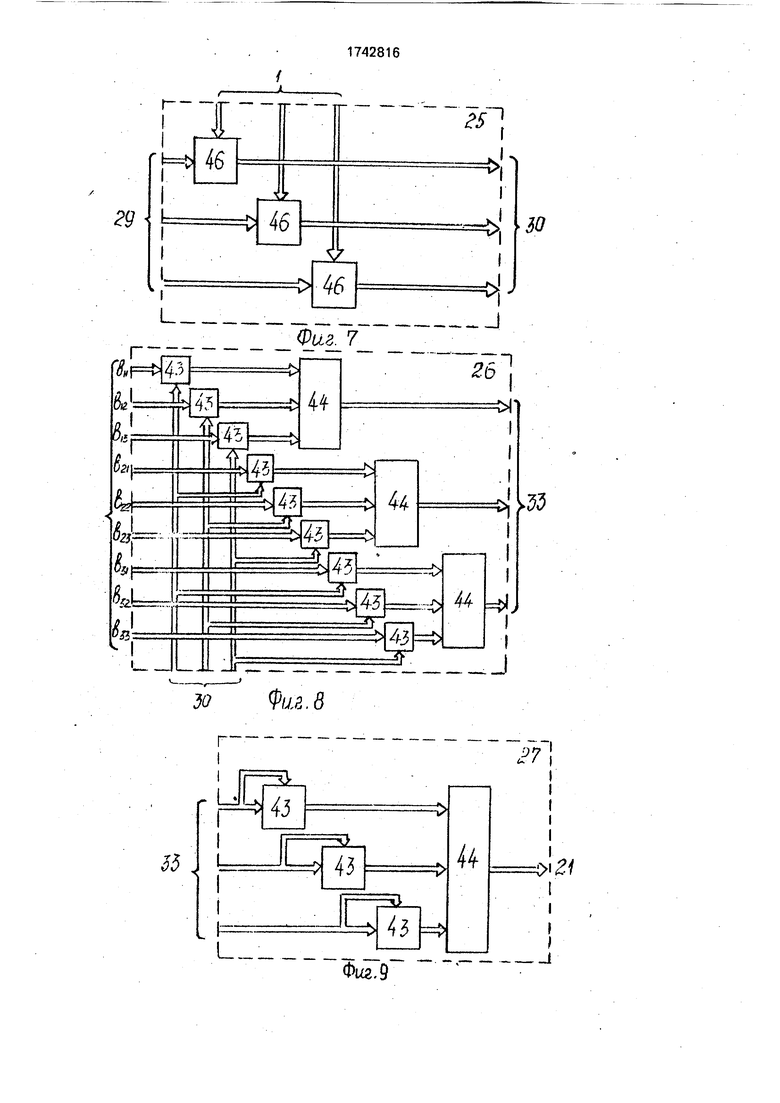
Формирователь 25 невязок (фиг.7) предназначен для получения величины рассогласования между измеренными и вычисленными величинами разностей рассто-Ј яний и состоит из двух групп 1 и 29 по три - входных шины, трех вычитателей 46 и труп- пы 30 из трех выходных шин. Соединены все элементы формирователя 25 невязок посхеме фиг.7. Каждая из j-x (j 1,3) входных шин группы 1 соединена с входами уменьшаемых j-x 0 1,3) вычитателей 46, входы вычитаемых которых объединены в группу 30 - выходных шин.
Блок 26 произведений (фиг.8) предназначен для формирования произведения матрицы на вектор и содержит группу 31 из девяти входных шин, группу 30 из трех входных шин, девять умножителей 43, три сумматора 44 и группу 33 из трех выходных шин, схема соединения которых приведена на фиг.8.
Блок27ошибки (фиг.9) предназначен для вычисления ошибки преобразования координат и содержит группу 33 из трех входных -; шин, три умножителя 43, сумматор 44 и выходную шину 21, соединенные (фиг.9) следующим образом. Каждая j-я (j 1,3) входная шина группы 33 соединена с входами первого и второгр сомножителей j-ro умножителя 43 0 1-3), выходъг--умножителей 43 соединены с входами сумматора 44, выход которого образует выходную шину 21.
Каждый блок 42 дополнений (фиг.10)
служит для вычисления алгебраических дополнений матрицы A(Xk) и содержит группу из шести входных шин, шесть умножителей 43, три вычитателя 46 и группу из трех выходных шин. Схема соединения элементов
блока 42 дополнения приведена-на фиг.10. Регистры 12 координат играют роль буферных регистров и предназначены для упорядочения работы преобразователя и устранения эффекта гонок.
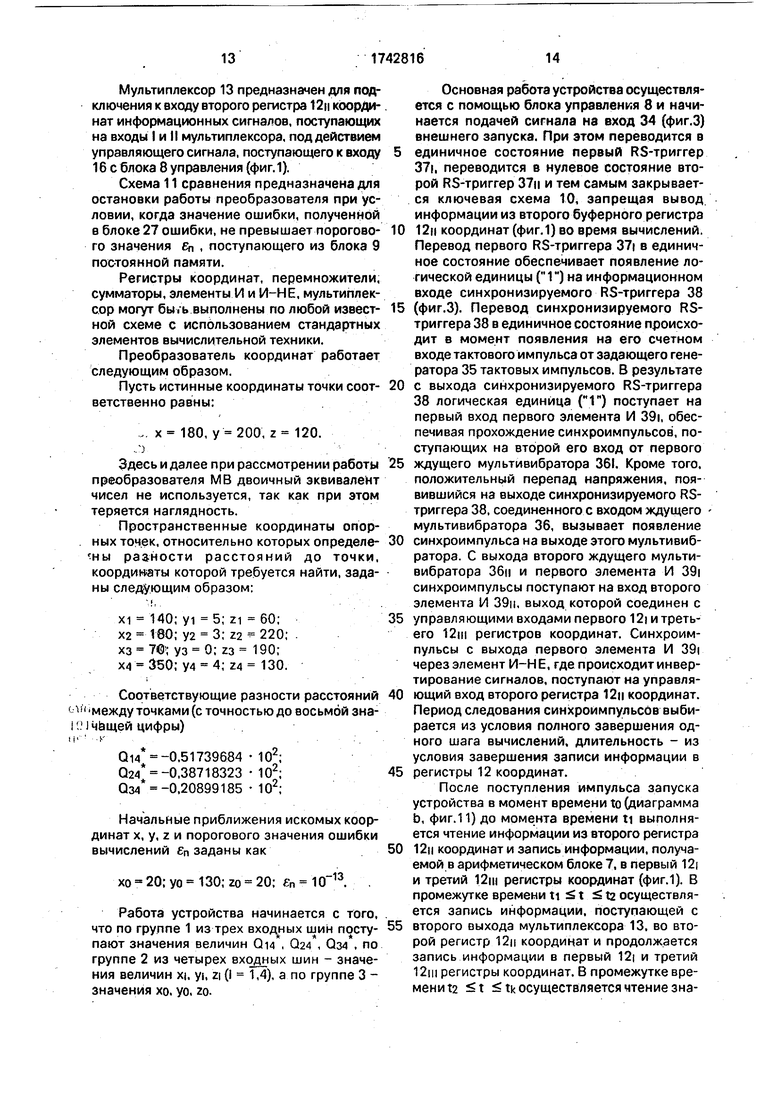
Мультиплексор 13 предназначен для подключения к входу второго регистра 12ц координат информационных сигналов, поступающих на входы I и II мультиплексора, под действием управляющего сигнала, поступающего к входу 5 16с блока 8 управления (фиг.1).
Схема 11 сравнения предназначена для остановки работы преобразователя при условии, когда значение ошибки, полученной в блоке 27 ошибки, не превышает порогово- 10 го значения Сп , поступающего из блока 9 постоянной памяти.
Регистры координат, перемножители, сумматоры, элементы И и И-НЕ, мультиплексор могут бы о. выполнены по любой извест- 15 ной схеме с использованием стандартных элементов вычислительной техники.
Преобразователь координат работает следующим образом.
Пусть истинные координаты точки соот- 20 ветственно равны:
. х 180, у 200, z 120. )
Здесь и далее при рассмотрении работы 25 преобразователя MB двоичный эквивалент чисел не используется, так как при этом теряется наглядность.
Пространственные координаты опорных точек, относительно которых определе- 30 гны рааности расстояний до точки, координаты которой требуется найти, заданы следующим образом:
t
xi 140; yi 5; zi 60;35
Х2 160; У2 3; гг 220; хз 7€; уз 0; гз 190; Х4 350; У4 4; Z4 130.
Соответствующие разности расстояний 40 между точками(с точностью до восьмой зна- Ччащей цифры)
Qи -0.51739684
Q24
Q34
-0,38718323 -0,20899185
Начальные приближения искомых координат х, у, г и порогового значения ошибки вычислений Јп заданы как
хо - 20; уо 130; ZQ 20; еп .
Работа устройства начинается с того, что по группе 1 из трех входных шин посту- пают значения величин Qi4 , Q24, СЫ. по группе 2 из четырех входных шин - значения величин XL yi, zi (I 1,4), а по группе 3 - значения хо. уо, zo.
5
10
15
0
5
0
5
0
5
0
5
Основная работа устройства осуществляется с помощью блока управления 8 и начинается подачей сигнала на вход 34 (фиг.З) внешнего запуска. При этом переводится в единичное состояние первый RS-триггер 37|, переводится в нулевое состояние второй RS-триггер 37ц и тем самым закрывается ключевая схема 10, запрещая вывод информации из второго буферного регистра 12ц координат (фиг.1) во время вычислений. Перевод первого RS-триггера 37| в единичное состояние обеспечивает появление логической единицы (Г) на информационном входе синхронизируемого RS-триггера 38 (фиг.З). Перевод синхронизируемого RS- триггера 38 в единичное состояние происходит в момент появления на его счетном входе тактового импульса от задающего генератора 35 тактовых импульсов. В результате с выхода синхронизируемого RS-триггера 38 логическая единица (1) поступает на первый вход первого элемента И 39i, обеспечивая прохождение синхроимпульсов, поступающих на второй его вход от первого ждущего мультивибратора 36I. Кроме того, положительный перепад напряжения, появившийся на выходе синхронизируемого RS- триггера 38, соединенного с входом ждущего мультивибратора 36, вызывает появление синхроимпульса на выходе этого мультивибратора. С выхода второго ждущего мультивибратора 36ц и первого элемента И 39i синхроимпульсы поступают на вход второго элемента И 39ц, выход которой соединен с управляющими входами первого 12| и третьего 12ц| регистров координат. Синхроимпульсы с выхода первого элемента И 39i через элемент И-НЕ, где происходит инвертирование сигналов, поступают на управляющий вход второго регистра 12ц координат. Период следования синхроимпульсов выбирается из условия полного завершения одного шага вычислений, длительность - из условия завершения записи информации в регистры 12 координат.
После поступления импульса запуска устройства в момент времени to (диаграмма Ь, фиг.11) до момента времени ti выполняется чтение информации из второго регистра 12ц координат и запись информации, получаемой в арифметическом блоке 7, в первый 12| и третий 12ц| регистры координат (фиг.1). В промежутке времени tt t 12 осуществляется запись информации, поступающей с второго выхода мультиплексора 13, во второй регистр 12ц координат и продолжается запись информации в первый 12| и третий 12щ регистры координат. В промежутке времени t2 t ti осуществляется чтение значений начальных приближений хо, уо, ад с второго регистра 12ц координат и подача этих значений на вход арифметического блока 7, вычисление первого приближения координат XL yi, zi и ошибки ei в арифметическом блоке 7 и запись этих значений в соответствующие первый 12i и третий 12щ регистры координат. На этом первый шаг вычислений завершается.
В промежутке времени tk t tk+i осуществляется перезапись информации (координат XL yi, zi) из первого регистра 12| координат во второй регистр 12ц координат через мультиплексор 13, который с момента 12 (диаграмма ж, фиг. 11) подает на выход информацию с первого входа, а также осуществляется считывание значения ошибки Ј1 с выхода третьего регистра 12щ координат на вход схемы 11 сравнения (фиг.1) и сравнение с порогом ЕП . Поскольку для рассматриваемого примера Е ЕП , то на выходе схемы 11 сравнения сигнал о выполнении неравенства CL Сп не появляется в течение второго шага вычислений, и блок управления продолжает работу без изменения режима работы. В промежутке времени, tk+1 t tk+2 в соответствии с диаграммой работы устройства (фиг.11) осуществляется считывание информации из второго регистра 12ц координат на вход арифметического блока 7, вычисление второго приближения координат Х2, У2, Z2 и ошибки и , запись этой информации в первый 12| и третий 12щ регистры координат. На этом завершается второй шаг вычислений.
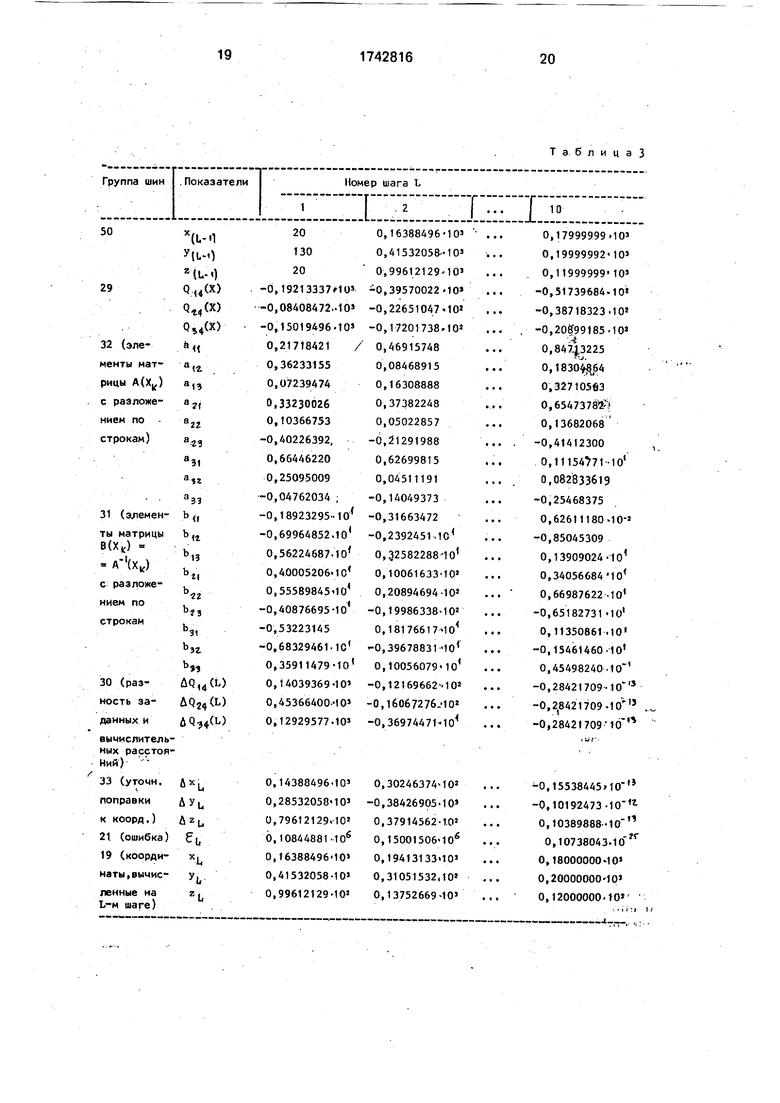
Для решения задачи преобразования координат в рассматриваемом конкретном численном примере требуется десять итераций (шагов) вычислительного процесса. Поскольку все оставшиеся восемь шагов выполяются по аналогии с вторым шагом, то остановимся на последнем, десятом шаге, когда полученное значение ошибки ею Јп (см. последнюю графу табл.3). В этом случае на одиннадцатом шаге схема 11 сравнения выдает импульс в момент времени tk+2 tN tk+з (фиг. 11, диаграмма к), который переводит первый RS- триггер 37| в нулевое состояние, второй RS-триггер 37ц - в единичное состояние, посредством чего открывается ключевая схема 10 и после момента t tk+з пропускает на выход преобразователя вычисленные на десятом шаге координаты гю, ую, zio, после чего в результате воздействия положительного перепада напряжения очередного тактового импульса на входе С синхронизируемого RS-триггера 38 последний переводится в нулевое состояние. Этим .заканчивается работа устройства (окончание вычислений) и установка его в исходное состояние.
Результаты вычислений на первом - десятом шагах на выходах блоков 23-28 приведены в табл.3.
Все элементы, входящие в состав устройства, могут быть выполнены на стандар- тных элементах средств автоматики и вычислительной техники, например элемент сумматор - на микросхемах К533 ИМ6, элемент перемножитель - на микросхемах 1802 ВР2, мультиплексор - К533 КП16.
Технические преимущества предлагаемого технического решения заключаются в
возможности определения пространственного положения точки не только по трем расстояниям до нее относительно трех опорныхточек с пространственными прямоугольными координатами, но и потрем разностям расстояний до нее относительно четырех опорных с известными координатами точек путем реализации алгоритма реше- ния нелинейной системы уравнений, связывающей заданные значения рэзностей расстояний с искомыми координатами.
Формула изобретения Преобразователь координат пр авт.св. № 1513445, отличающийся тем, что, с
целью расширения класса решаемых задач за счет возможности вычисления координат точки пересечения трех двухполостных гиперболоидов вращения, задаваемых разностями расстояний относительно четырех
опорных точек с известными координатами, блок определения расстояний и производных дополнительно содержит четвертый формирователь производных и двенадцать вычитателей, причем входы первой, второй
и третьей координаты четвертой опорной точки преобразователя соединены с входами соответственно с первого по третий первой группы входов четвертого формирователя производных, первый, второй и третий входы
второй группы входов которого объединены соответственно с первым и третьим входами второй группы входов первого, второго и третьего формирователей производных, выходы расстояний которых соединены с входами уменьшаемых соответственно первого, второго и третьего вычитателей, входы вычитаемых которых соединены с выходами рас- стояния четвертого формирователя производных, выходы первых частных производных первого, второго и третьего формирователей производных соединены с входами уменьшаемых вычитателей соответственно с четвертого по шестой, входы вычитаемых которых соединены с выходом первой частной производной четвертого формирователя
производных, выходы вторых частных производных первого, второго и третьего формирователей производных соединены с входами уменьшаемых вычитателей соответственно с седьмого по девятый, входы вычитаемых которых соединены с выходом второй частной производной четвертого формирователя производных, выходы третьих частных производных первого, второго и третьего формирователей производных соединены с входами уменьшаемых
0
вычитателей соответственно с десятого по двенадцатый, входы вычитаемых которых объединены и соединены с выходами третьей частной производной четвертого формирователя производных, выходы вычитателей с первого по третий соединены с первой группой выходов блока определения расстояния и производных, выходы вычитателей с четвертого по двенадцатый соедине- ны с второй группой выходов блока определения расстояния и производных.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования координат | 1990 |
|
SU1800455A1 |
| СПОСОБ ОЦЕНИВАНИЯ НЕСУЩЕЙ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100812C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ СОПРОВОЖДЕНИЯ ВОДОЛАЗА | 2017 |
|
RU2672505C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ЭТАЛОННОЙ КАРТЫ МЕСТНОСТИ ДЛЯ НАВИГАЦИОННЫХ СИСТЕМ | 1992 |
|
RU2022355C1 |
| УСТРОЙСТВО ДЛЯ ДИСКРЕТНОЙ ОБРАБОТКИ СИГНАЛОВ | 1998 |
|
RU2141737C1 |
| УСТРОЙСТВО ДЕКОДИРОВАНИЯ РТСМ | 2008 |
|
RU2390930C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085755C1 |
| Сглаживающее устройство | 1984 |
|
SU1265797A1 |
| Устройство для преобразования координат | 1989 |
|
SU1681313A1 |
| Устройство формирования точной оценки измеряемого параметра | 1983 |
|
SU1100594A1 |

Изобретение относится к области вычислительной техники и может быть исполь- зовано в геодезических трилатерационных системах для преобразования пространственных координат и является усовершенствованием устройства по авт.св. № 1513445. Целью изобретения является расширение класса решаемых задач за счет возможности вычисления координат точки пересечения трех двухполостных гиперболоидов вращения, задаваемых разностями расстояний относительно четырех опорных точек с известными координатами. Преобразователь содержит три группы 1-3 входных шин, выходную шину 4, арифметический блок 7, блок 8 управления, блок 9 управления,ключевую схему 10, схему 11 сравнения, три регистра 12 координат и мультиплексор 13. 11 ил., 3 табл.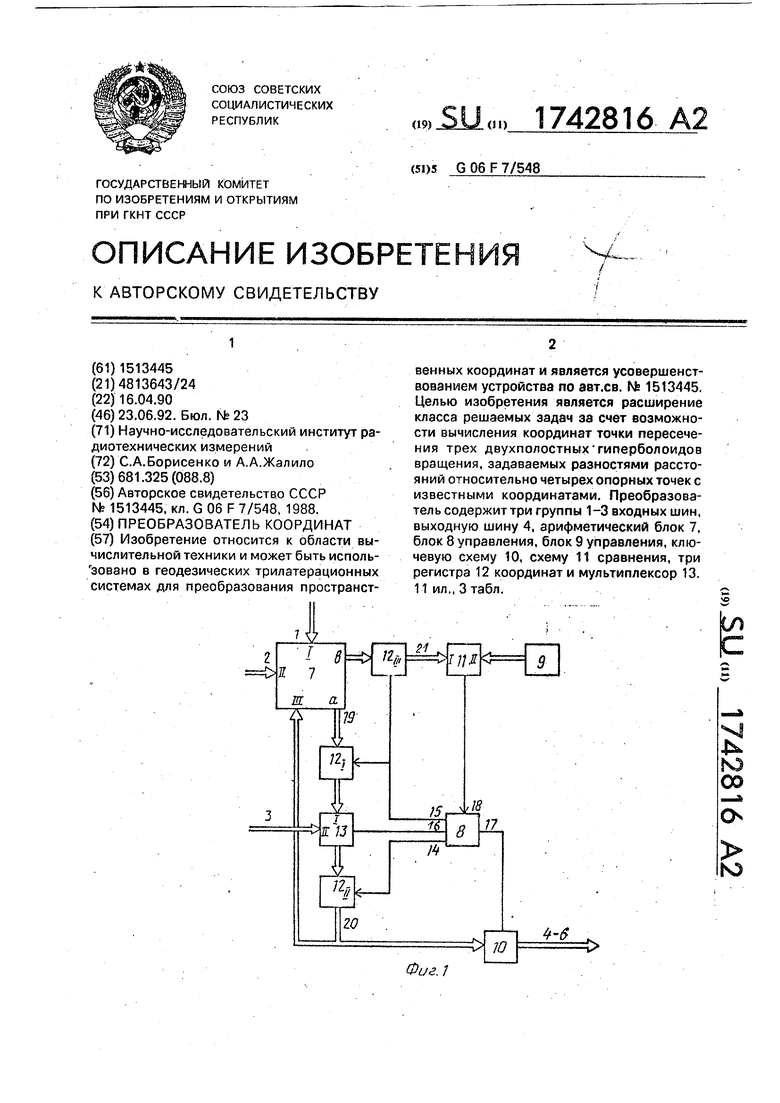
Таблица 1
Т а б ли ц а 2
ТаблицаЗ
I
Фиг. 2
ч
1ё
71
Фиг 5
ю
5
N
Г
rЗ гпф
ъ
-л
9182Ш
# «
1
П
I r -
t
3L
fV
H/
A
9
91 sent
I j Si Гу у yi
L
V
| Преобразователь координат | 1988 |
|
SU1513445A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
