Предлагаемый гидроакустический дальномер предназначен для использования в гидроакустических навигационных системах с маяками-ответчиками.
Известны радиолокационные и радионавигационные измерители дальности, в которых измерение дальности производится по большому количеству циклов запрос-ответ. В водной среде скорость распространения звука в 2·105 раз меньше скорости распространения радиоволн в атмосфере, чем объясняются низкие скорости передачи информации. Время распространения сигнала от запросчика до маяка-ответчика (МО) и обратно в водной среде на дистанции 20-25 км около 30 с, что при наличии требований к оперативности измерений приводит к необходимости измерения дальности по единичному циклу запрос-ответ. При этом для принятия решения о наличии сигнала ответа необходимо анализировать полностью весь интервал от момента запроса до момента приема ответного сигнала. Известна аппаратура для измерения дистанции, в которой ошибочная индикация исключается посредством сравнения цифрового результата с предыдущим с целью определения того, что они равны с точностью до допустимого разброса, прежде чем измеренный результат подается на выход устройства (патент США №3589378, кл. 340-3, 1970 г.), а также система запрета съема ложных сигналов путем стробирования на интервале времени, на котором ожидается сигнал ответа, в системах радиолокационного измерения дальности (патент США №3603672, кл. 340-3, 1971 г.). В указанных системах снижение вероятности ложных тревог достигается путем сравнения результатов измерения с предыдущими и сокращением величины анализируемого участка, стробированием приемного усилителя импульсами, получаемыми от системы автоматического сопровождения по дальности. Использование таких способов уменьшения вероятности ложных тревог в гидроакустических дальномерах может привести к существенному снижению оперативности получения информации.
Целью настоящего изобретения является увеличение помехоустойчивости гидроакустического навигационного дальномера при измерении дальности до MO по единичному циклу запрос-ответ.
Поставленная цель достигается тем, что в приемный тракт дальномера, содержащий усилитель сигналов ответа MO, интегратор, пороговую схему и цифровой счетчик дистанции, вход запуска которого соединен с трактом излучения, а вход остановки - с приемным трактом, введены последовательно соединенные второй интегратор, вторая пороговая схема и ждущий мультивибратор; на входе запуска цифрового счетчика введена схема задержки, а на входе его остановки введена схема перемножения, один вход которой соединен с выходом ждущего мультивибратора, а второй вход через схему задержки соединен с первой пороговой схемой, причем задержка выполнена на время, соответствующее длительности сигнала MO (τu).
Из теории связи известно, что вероятность ошибочного приема сигнала Pош=0,5[1-Φ(γh)],
где 
γ - зависит от вида модуляции сигнала;
h - отношение средней энергии сигнала на входе приемника к спектральной плотности помехи.
Ошибка измерения временного положения сигнала (ошибка измерения дальности)

где τф - длительность переднего фронта импульса на входе решающего устройства;
q - отношение сигнал/шум на входе решающего устройства.
Учитывая ограниченную мощность ответных сигналов маяков, являющихся автономными устройствами, устанавливаемыми на дно океана, величину q можно считать ограниченной, и поэтому для получения минимальных ошибок измерения дальности следует стремиться к уменьшению τф.
Для обеспечения достаточной помехоустойчивости при ограниченной мощности сигнала ответа MO следует увеличивать длительность импульса ответа MO и постоянную времени интегрирования в тракте регистрации сигнала. Возникающее противоречие при одновременном удовлетворении требований к точности и помехоустойчивости разрешается путем разделения после детектора тракта обработки на тракт обнаружения, содержащий интегратор, согласованный с длительностью ответного сигнала маяка, пороговое устройство и ждущий мультивибратор, и на тракт измерения, содержащий интегратор, согласованный с длительностью переднего фронта сигнала маяка на выходе антенны приемника корабельной аппаратуры, пороговое устройство и схему задержки. Тракты объединяются на перемножителе, так как импульс с порогового устройства, соответствующий переднему фронту сигнала, задерживается схемой задержки на величину времени интегрирования, равную длительности сигнала, и попадает на остановку цифрового счетчика дальности только при условии обнаружения и регистрации сигнала.
Возникающая при этом задержка остановки цифрового счетчика компенсируется введением схемы задержки на τu в цепь его пуска.
На чертеже представлена блок-схема гидроакустического навигационного дальномера. Дальномер содержит тракт излучения сигналов 1, приемный тракт с усилителем 2, интеграторы 3, 4, пороговые устройства 5, 6, схемы задержки 7,8, ждущий мультивибратор 9, перемножитель 10 и цифровой счетчик дистанции 11.
Цифровой счетчик дистанции запускается с задержкой, равной длительности импульса ответа MO. Сигнал запроса принимается МО, который излучает сигнал ответа. Сигнал ответа МО поступает на приемный тракт 2. Усиленный и продетектированный сигнал поступает на интеграторы 3 и 4. Постоянная времени интегрирования интегратора 3 согласована с длительностью переднего фронта сигнала, а интегратора 4 - с длительностью сигнала. Сигнал в I канале вызывает срабатывание порогового устройства 5 практически одновременно с приходом сигнала. Во II-м канале пороговое устройство 6 срабатывает при окончании сигнала. Импульс, выработанный пороговым устройством 5, задерживается схемой задержки 7 на время, равное длительности импульса, и поступает на перемножитель 10.
Импульс, выработанный пороговым устройством 6, вызывает срабатывание ждущего мультивибратора 9, импульс вырабатываемый, который поступает также на перемножитель 10. Длительность импульса ждущего мультивибратора 9 должна быть равна величине  . При совпадении по времени импульсов, поступающих на перемножитель 10 с I и II каналов, на его выходе появляется импульс, останавливающий счетчик дистанции.
. При совпадении по времени импульсов, поступающих на перемножитель 10 с I и II каналов, на его выходе появляется импульс, останавливающий счетчик дистанции.
Введение в дальномер интегратора, порогового устройства ждущего мультивибратора, перемножителя и двух схем задержки приводит к увеличению его помехоустойчивости. В заявляемом гидроакустическом дальномере вероятность ошибки при анализе интервала времени от момента запроса до момента ответа Т, когда весь временной интервал разбивается на m=T/τu участков
(где τu - длительность сигнала ответа маяка) составляет:
Pош=(m-1)F(1-D),
D - вероятность правильного обнаружения,
F - вероятность ложной тревоги.
С другой стороны, при необходимости обеспечения точности измерения временного интервала δt интервал Т необходимо было бы разбить на m1=T/δt участков, в связи с чем вероятность ошибочного решения составила бы

Учитывая, что может быть всегда выбрано τu>>δt в предлагаемой схеме, количество анализируемых участков сокращается в τu/δt>>1 раз, что и приводит к увеличению ее помехоустойчивости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 1995 |
|
RU2084923C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2032187C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
Гидроакустический навигационный дальномер содержит тракт излучения сигнала запроса маяков-ответчиков, приемный тракт с усилителем, интегратором, согласованным с длительностью переднего фронта и пороговой схемой, а также счетчик дистанций. В гидроакустический навигационный дальномер введены первая схема задержки, подключенная между выходом тракта излучения и входом запуска счетчика дистанции, перемножитель, вторая схема задержки, подключенная по входу к выходу порогового устройства, а по выходу - к первому входу перемножителя. Кроме того, введены последовательно соединенные второй интегратор, согласованный с длительностью ответного сигнала, пороговое устройство и ждущий мультивибратор. Причем вход второго интегратора связан с выходом усилителя, а выход ждущего мультивибратора подключен ко второму входу перемножителя, выход которого подсоединен к входу счетчика дистанции. Технический результат - увеличение помехоустойчивости гидроакустического навигационного дальномера при измерении дальности до МО по единичному циклу запрос-ответ. 1 ил.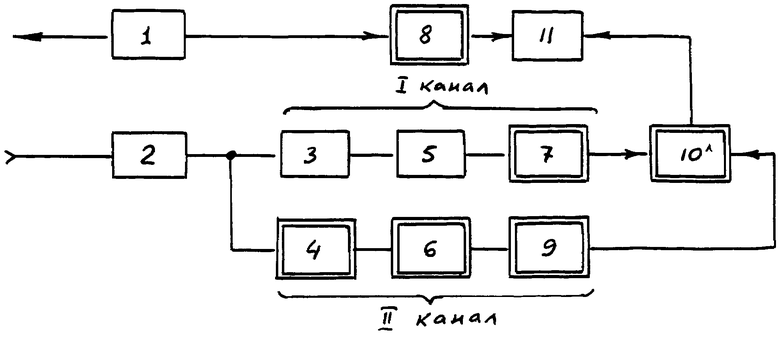
Гидроакустический навигационный дальномер, содержащий тракт излучения сигнала запроса маяков-ответчиков, приемный тракт с усилителем, интегратором, согласованным с длительностью переднего фронта сигнала и пороговой схемой, а также счетчик дистанции, отличающийся тем, что, с целью повышения помехоустойчивости, в него введены первая схема задержки, подключенная между выходом тракта излучения и входом запуска счетчика дистанции, перемножитель, вторая схема задержки, подключенная по входу к выходу порогового устройства, а по выходу - к первому входу перемножителя, и последовательно соединенные второй интегратор, согласованный с длительностью ответного сигнала, пороговое устройство и ждущий мультивибратор, причем вход второго интегратора связан с выходом усилителя, а выход ждущего мультивибратора подключен ко второму входу перемножителя, выход которого подсоединен к входу счетчика дистанции.
| Фалькович С.Е | |||
| Прием радиолокационных сигналов на фоне флюктуационных помех, М., Сов | |||
| радио, 1961, стр.293-294 | |||
| Патент Англии, класс Н4D, №1212265, опубл | |||
| Кинематографический аппарат | 1923 |
|
SU1970A1 |

