Изобретение относится к измерительной технике В прокатном производстве и может быть использовано для автоматизированного входного и выходного контроля геометрических размеров проката непосредственно в технологическом потоке, например длины труб (листов слябов), ширины листов, диаметра труб, перемещающихся в продольном направлении по транспортным рольгангам.
Цель изобретения - повышение точности измерения за счет уменьшения по- грешиости, вызванной колебаниями поверхности контролируемого объекта в направлении, перпендикулярном плоскости анализа.
Создание на поверхности контролируемого объекта реперных точек с фиксированным эталонным расстоянием между ними, сравнение его с расстоянием между изображениями этих же точек в плоскости анализа (на рабочей поверхности координатно-чувствительного фотоприемника), вычисление значения корректирующего сигнала и внесение поправки в результате измерения позволяют значительно повысить точность измерения и сделать эту точность не зависимой от поперечных колебаний объекта на участке контроля и возможных изменений сортамента (в частности, диаметра).
Существо способа состоит в том, что с помощью двух лазерных источников кблли00
о ся
N3 Ю СлЭ
мированного света создают на поверхности объекта две светящиеся реперные точки, отстоящие друг от друга на расстоянии Ц, принятое за эталонное.
С помощью оптической системы изображения этих точек проецируют вместе с изображением объекта на плоскость анализа (рабочую зону координатно-чувствитель- ного фотоприемника). При этом фоновую засветку направляют на контролируемый объект.: .
С выхода координатно-чувствительного фотоприемника выделяют сигналы изобра,- жения контролируемого изделия и отдельно сигналы изображения реперных точек и измеряют длину 10 объекта и расстояние 1э между сигналами реперных дочек, Затем вычисляют поправочный коэффициент
f / 1з
Ч u /
Действительное значение измеряемой величины, например длину объекта , определяют, как произведение найденной ранее
длины 10 ка указанный коэффициент, т.е. .1/
О - IQ N.
Из анализа оптической системы следует, что связь между размерами изделия и эталона я их изображениями в плоскости анализа при перемещении объекта в направлении, перпендикулярном этой плоскости, подчиняется одному закону, что позволяет полностью компенсировать возникающую при этом перемещении погрешность измерения.
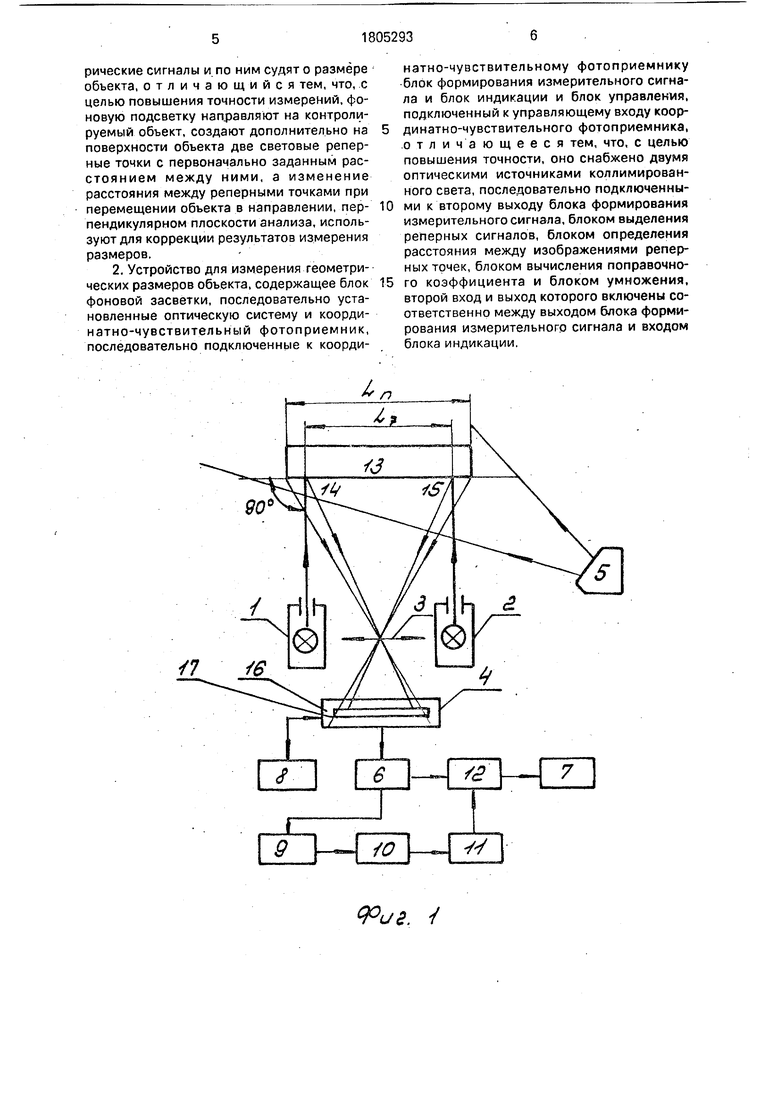
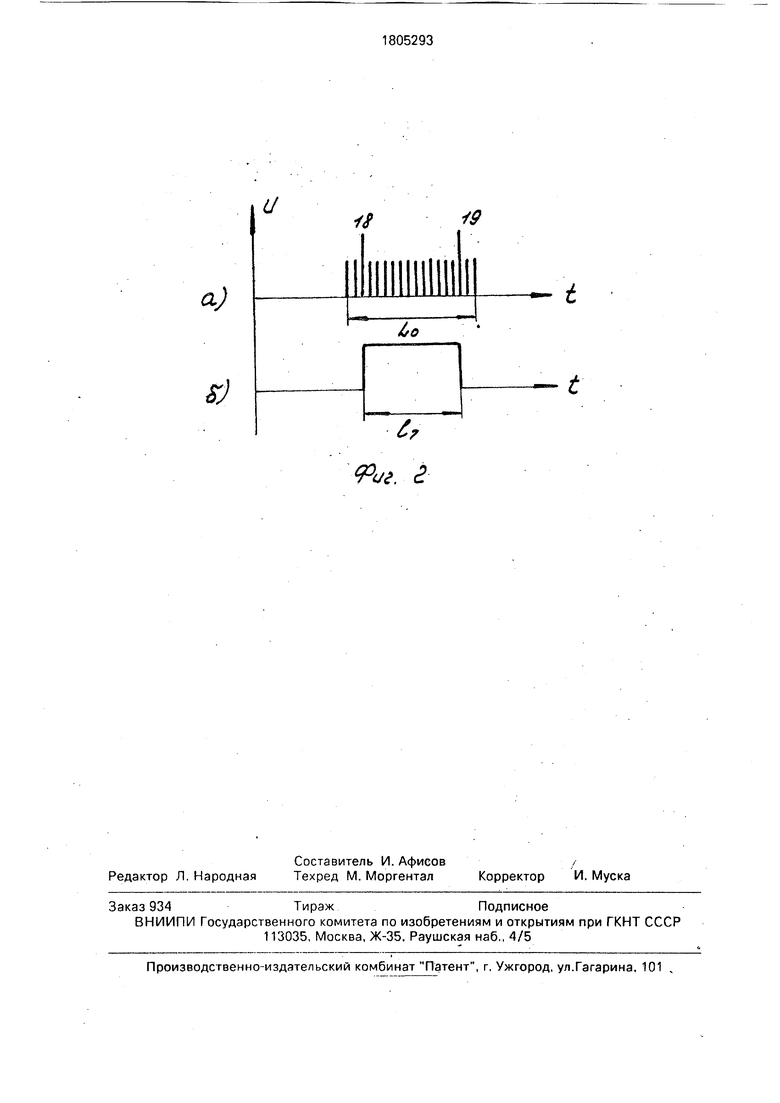
На фиг. 1 приведена структура устройства для измерения геометрических размеров объекта; из фиг, 2,а,б - эпюра сигналов на выходах координатно-чувствительного фотоприемника и блока определения расстояния между изображениями реперных точек в плоскости анализа.
Устройство для измерения геометрических размеров обьекта состоит из двух лазерных источников 1 и 2 коллимированного света, оптической системы 3, координатно- чувствительного фотоприемника 4, источника 5 фоновой засветки, подключенного к выходу фотоприемника 4, блока 6 формирования измерительного сигнала, блока 7 индикации, подключенного к управляющему входу фотоприемника 4, блока 8 управления. К второму выходу блока б формирования измерительного сигнала последовательно подключены блок 9 выделения реперных сигналов, блок 10 определения расстояния между изображениями реперных точек, блок 11 вычисления поправочного коэффициента и блок 12 умножения, включенный вторым входом и выходом соответственно между выходом блока 6 формирования измерительного сигнала и
входом блока 7 индикации,
Устройство для измерения геометрических размеров объекта работает следующим образом.
Лазерные источники 1 и 2 создают на
поверхности контролируемого объекта 13 световые реперные точки 14 и 15, расстояние между которыми равно наперед заданной величине U и принято за эталонное и которые вместе с изображением объекта 13
проецируются на поверхность рабочей зоны координатно-чувствительного фотоприемника 4 (точки 16 и 17), расстояние между которыми равно 10. По командам блока 8 управления производится опрос элементов
координатно-чувствительного фотоприемника 4. Сигнал на его выходе изображен на фиг.2,а. Импульсы 18 и 19 от изображения реперных точек 1.6 и 17 имеют амплитуду, большую, чем импульсы, соответствующие
изображению объекта, т.к. интенсивность освещения лазерными источниками берется выше, чем освещенность объекта 13 от источника 5 фоновой засветки. Эти импульсы выделяются блоком 9, который своими
сигналами запускает блок 10 определения расстояния между изображениями реперных точек (э. Блок 11 вычисляет коэффициент К f (- }, одновременно осу U /
ществляет масштабирование и выдает значение коэффициента К на вход блока 12 умножения. Блок 12 умножения производит умножение ранее определенного блоком 6 размера объекта 13 на поправочный коэффициент К. Результат измерения индицируется на блоке 7 индикации.
Использование предлагаемого способа измерения геометрических размеров, объекта, конструкция устройства для его осуществления позволяют по сравнению, с существующими повысить точность измерения за счет одновременного измерения одним и тем же чувствительным элементом (координатно-чувствительным фотоприемником) как размера объекта, так и эталонного расстояния и корректировки значения размера объекта,
Формула изобретения
1, Способ измерения геометрических
размеров объекта, заключающийся в том, что изображение объекта проецируют в плоскость анализа и производят фоновую подсветку,, преобразуют оптический сигнал от изображения в плоскости анализа в электрические сигналы и по ним судят о размере объекта, отличающийся тем, что, с целью повышения точности измерений, фоновую подсветку направляют на контролируемый объект, создают дополнительно на поверхности объекта две световые репер- ные точки с первоначально заданным расстоянием между ними, а изменение расстояния между реперными точками при перемещении объекта в направлении, перпендикулярном плоскости анализа, используют для коррекции результатов измерения размеров.
2. Устройство для измерения геометрических размеров объекта, содержащее блок фоновой засветки, последовательно установленные оптическую систему и коорди- натно-чувствительный фото прием ни к, последовательно подключенные к координатно-чувствительному фотоприемнику блок формирования измерительного сигнала и блок индикации и блок управления, подключенный к управляющему входу координатно-чувствительного фотоприемника, .отличающееся тем, что, с целью повышения точности, оно снабжено двумя оптическими источниками коллимирован- ного света, последовательно подключенными к второму выходу блока формирования измерительного сигнала, блоком выделения реперных сигналов, блоком определения расстояния между изображениями реперных точек, блоком вычисления поправочного коэффициента и блоком умножения, второй вход и выход которого включены соответственно между выходом блока формирования измерительного сигнала и входом блока индикации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2468383C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092788C1 |
| Устройство для контроля деформаций поверхности конструкций и сооружений большой площади | 2017 |
|
RU2658110C1 |
| Устройство для измерения толщины листовых изделий | 2024 |
|
RU2834575C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ ОБЪЕКТАМИ | 2015 |
|
RU2596607C1 |
| СПОСОБ ГРАДУИРОВКИ ПРИБОРОВ ТЕПЛОВИЗИОННЫХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2755093C1 |
| СПОСОБ КОМПЕНСАЦИИ НЕОДНОРОДНОСТИ СИГНАЛА ФОТОЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ МНОГОЭЛЕМЕНТНОГО ФОТОПРИЕМНИКА | 2010 |
|
RU2449491C1 |
| СПОСОБ СУБПИКСЕЛЬНОГО КОНТРОЛЯ И СЛЕЖЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ УДАЛЕННОГО ОБЪЕКТА | 2012 |
|
RU2506536C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ И/ИЛИ ДЕФОРМАЦИЙ ОБРАЗЦА ПРИ ВЫСОКОТЕМПЕРАТУРНОМ ВОЗДЕЙСТВИИ НА НЕГО И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2665323C1 |
| УСТРОЙСТВА, СПОСОБЫ И СИСТЕМЫ ДЛЯ ИЗМЕРЕНИЯ И ОБНАРУЖЕНИЯ ЭЛЕКТРИЧЕСКОГО РАЗРЯДА | 2014 |
|
RU2661976C2 |
Изобретение относится к измерительной технике в прокатном производстве и может быть использовано для автоматизированного входного и выходного контроля ширины проката (длины переменной или хвостовой части диаметра труб и т.п.). Цель изобретения - повышение точности измерения. Это достигается тем, что с помощью двух лазерных источников коллими- рованного света создают на поверхности объекта две светящиеся реперные точки, расстояние между которыми принято за эталонное э, изображение которых с помощью оптической системы проецируют вместе с изображением объекта на рабочую зону координатно-чувствительного элемента, с выхода которого выделяют сигналы изображения реперных точек, измеряют расстояние между ними, а затем вычисляют поправочный коэффициент К и определяют длину объекта L0 по формуле Lo lo К, где К f lo - изображение расстояния меж- с L-эЗ ду реперными точками; U - изображение эталонного расстояния. 2 с.п. ф-лы, 2 ил. (Л
Фиг. /
U
S-J
if
19
г
, г
| Авторское свидетельство СССР | |||
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ РАЗМЕРОВ ИЗДЕЛИЙ | 0 |
|
SU399726A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Фотоэлектрическое устройство для измерения геометрических размеров объектов | 1981 |
|
SU993017A1 |
