.. Изобретение относится к технологии машиностроения, в частности к абразивной обработке ферромагнитными порошками в магнитном поле. Оно предназначено для обработки наружных и внутренних сферических поверхностей различных габаритов, а также плоскостей из сталей, цветных металлов, сплавов и неметаллических материалов..
Цель изобретения - расширение технологических возможностей при обработке внутренних и наружных поверхностей, а также плоскостей различных габаритов.
Дополнительный привод вращения и механизм связи его с осью индуктора, предназначены для задания индуктору дополнительного вращательного движения и изменения расстояния и угла между осями индуктора и привода его вращения, что позволяет регулировать площадь обработки (минимальная соответствует диаметру корпуса магнитного индуктора, максимальная зависит от размеров механизма связи привода с осью индуктора и превосходит минимальную в несколько раз). Кроме того, изменение угла наклона оси магнитного индуктора с помощью указанного механизма обеспечивает возможность обработки фасонных и сферических поверхностей различных размеров. Совокупность трех перемещений (двух вращательных и одного поступательного) позволяет интенсифицировать перемешивание магнитно-абразивного порошка в зоне обработки, что положительно сказывается на качестве обрабатываемой поверхности.
На фиг. 1 представлено устройство (схематично) при обработке плоскости; на фиг.
2 - вид А фиг. 1 (без стола и детали); на фиг.
3 - вид I (повернуто) фиг. 1; на фиг. 4 и фиг, 5 - виды И и III фиг. 1 в разрезе; на фиг, 6- устройство (схематично) при обработке наружной сферической поверхности.
00
о
00
о о ю
Устройство для магнитно-абразивной обработки сферических поверхностей и плоскостей содержит привод 1 вращения индуктора и дополнительный привод 2 вращения. Приводы 1 и 2 установлены на кон- солях (не показаны) с возможностью перемещения по вертикали и горизонтали. Ось 3 привода 1 посредством гибкого вала 4, металлического или из любого другого материала, обладающего необходимой гиб- костью и жесткостью соединена с осью 5 магнитного индуктора, содержащего корпус 6, который может перемещаться вдоль оси 5. По краю корпуса 6 в пазах с помощью осей 7установлены рычагиВсзакрепленны- ми в них с помощью винтов 9 постоянными магнитами 10, На оси 5 жестко крепится дис к 11, на конце которого установлены шарниры 12 с помощью осей 13. В отверстия шарниров 12 вставлены направляю- щие 14 с возможностью их фиксации болтами 15. В верхней части рычагов 8 имеются отверстия с резьбой, по которым крепятся направляющие 14. Число шарниров 12 и направляющих 14 соответствует коли- честву рычагов 8. Совокупность элементов 11, 12, 13, 14 и 15 является средством фиксации поворота рычагов 8. На конце оси 5 установлена шариковая опора 16 из немагнитного материала. Привод 2 посредством зубчатой передачи соединен с втулкой 17, имеющей возможность вертикального перемещения вдоль оси 3 привода 1, К втулке 17 при помощи шарнира 18 крепится двух- звенная шарнирная тяги, состоящая из ры- чагов 19 и 20. Рычаг 20 жестко связан с втулкой 21, представляющей собой подшипник скольжения, посаженный на ось 5 магнитного индуктора между упорами 22. Шарнир 23 тяги может жестко фиксировать- ся с помощью болтового соединения 24.
Деталь 25 устанавливается и крепится (не показано) на столе 26. В первоначальном (настроечном) положении направляющие 14 свободно перемещаются в шарнире 12, не закрепленные болтами 15, а шарнир 23 также не зафиксирован болтовым соеди- нением 24.
Устройство работает следующим образом.
Деталь 25 устанавливается и крепится на столе 26; При необходимости стол приводится во вращение (при обработке сфериче- скихдеталей) или в возвратно-поступательное и поперечное движения (при обработке плоскостей).
В контакт с обрабатываемой поверхностью вводится шариковая опора 16. Перемещая вдоль оси 5 корпус 6, устанавливают необходимый (1,5-2 мм) рабочий зазор между полюсниками и обрабатываемой поверхностью. Вращая рычаги 8 вокруг осей 7, устанавливают рабочие поверхности магнитов 10 коаксиально, либо под углом к обрабатываемой поверхности. В таком положении фиксируем рычаги 8 при помощи соединенных с ними направляющих 14 болтами 15 в шарнире 12. В зависимости от габаритов обрабатываемой детали 25 при помощи двухзвенной шарнирной тяги индуктор устанавливается в место начала обработки (при этом необходимо следить за величиной рабочего зазора по всему кольцу магнитного индуктора) и фиксируется в этом положении болтовым соединением 24.
В рабочие зазоры вводится магнитно- абразивный порошок. Привод 1 приводит во вращение посредством гибкого вала 4 магнитный индуктор, который вращается относительно оси 5, а привод 2 передает крутящий момент втулке 17, шарниру 18 и рычагу 19 двухзвенной тяги. Таким образом, происходит вращение магнитного индуктора относительно двух осей.
Формула изобретения Устройство для магнитно-абразивной обработки деталей, содержащее индуктор, торцовая рабочая поверхность которого образована постоянными магнитами, закрепленными на рычагах, установленных в корпусе индуктора равномерно по окружности с возможностью поворота вокруг осей, лежащих в плоскости, перпендикулярной оси вращения индуктора, средство фиксации поворота рычагов и привод вращения индуктора, отличающееся тем, что, с целью расширения технологических возможностей, устройство снабжено дополнительным приводом вращения и механизмом связи его с осью индуктора, предназначенными для задания индуктору дополнительного вращательного движения и изменения расстояния и угла между осями индуктора и привода его вращения, при этом ось индуктора связана с приводом его вращения введенным в устройство гибким валом, а механизм связи индуктора с дополнительным приводом выполнен в виде установленных на осях привода и индуктора втулок, связанных между собой двухзвенной шарнирной тягой, рычаги которой выполнены с возможностью изменения угла между ними и его фиксации, причем втулка на оси привода установлена с возможностью осевого перемещения и связана кинематически с дополнительным приводом и шарнирно с рычагом тяги, а втулка на оси индуктора установлена с возможностью свободного вращения и жестко связана с рычагом тяги.
ЮО
Ox
| название | год | авторы | номер документа |
|---|---|---|---|
| Чертежный станок | 1986 |
|
SU1553043A1 |
| СПОСОБ И СТАНОК ДЛЯ ОБРАБОТКИ КОЛЬЦЕВЫХ ПОВЕРХНОСТЕЙ | 2000 |
|
RU2215634C2 |
| АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЁТА | 2004 |
|
RU2261822C1 |
| Станок для обработки сферических поверхностей | 1980 |
|
SU889394A1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ ВРАЩАТЕЛЬНЫХ ПРОИЗВОДНЫХ АЭРОДИНАМИЧЕСКИХ СИЛ И МОМЕНТОВ МОДЕЛИ В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 2012 |
|
RU2522794C1 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОЧИСТКИ И ОБРАБОТКИ ПОВЕРХНОСТЕЙ "РОП" | 2001 |
|
RU2236313C2 |
| Универсальное устройство для ориентирования и фиксации трубчатых элементов | 1990 |
|
SU1733166A1 |
| УСТРОЙСТВО ДЛЯ ЛЕНТОЧНОГО ШЛИФОВАНИЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ АППАРАТОВ | 2001 |
|
RU2209717C2 |
| УСТРОЙСТВО ДЛЯ АЛМАЗНО-АБРАЗИВНОЙ ОБРАБОТКИ С ПЛАНЕТАРНЫМ ОСЦИЛЛИРУЮЩИМ ДВИЖЕНИЕМ | 2010 |
|
RU2428297C1 |

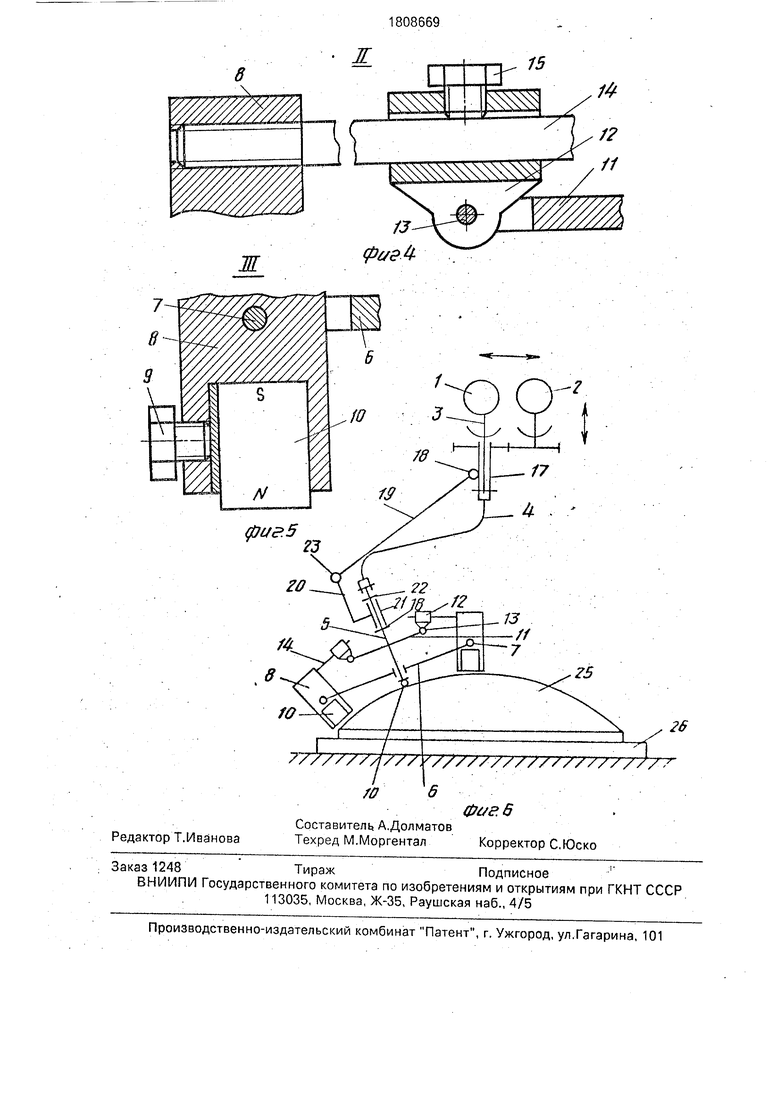
Использование: чистовая обработка наружных и внутренних сферических поверхностей различных габаритов, а также плоскостей из сталей, цветных металлов, сплавов и неметаллических материалов. Сущность изобретения: привод (1) устройства связан с осью (5) магнитного индуктора гибким валом (4). Привод (1) приводит индуктор во вращение вокруг его оси. Второй привод (2) задает вращение индуктору вокруг оси (3) через втулки (17, 21) и шарнирную тягу. Рычаги (19, 20) шарнирной тяги связаны между собой шарниром (23) с возможностью фиксации заданного положения. Изменение расстояния и угла между осями индуктора и привода его вращения позволяет регулировать площадь обработки. 6 ил.
/ ////////У/У/У/////////////////////
А
fit/el
ви&А
и -с
ft
I-- /ff
гА
ре/е.З
| Устройство для магнитно-абразивной обработки изделий | 1982 |
|
SU1106641A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
