Изобретение относится к измерительной технике и может быть использовано для контроля положения магистральных трубопроводов в процессе строительства и эксплуатации.
Целью изобретения является повышение точности и увеличение длины-измеряемых участков обследуемых трубопроводов.
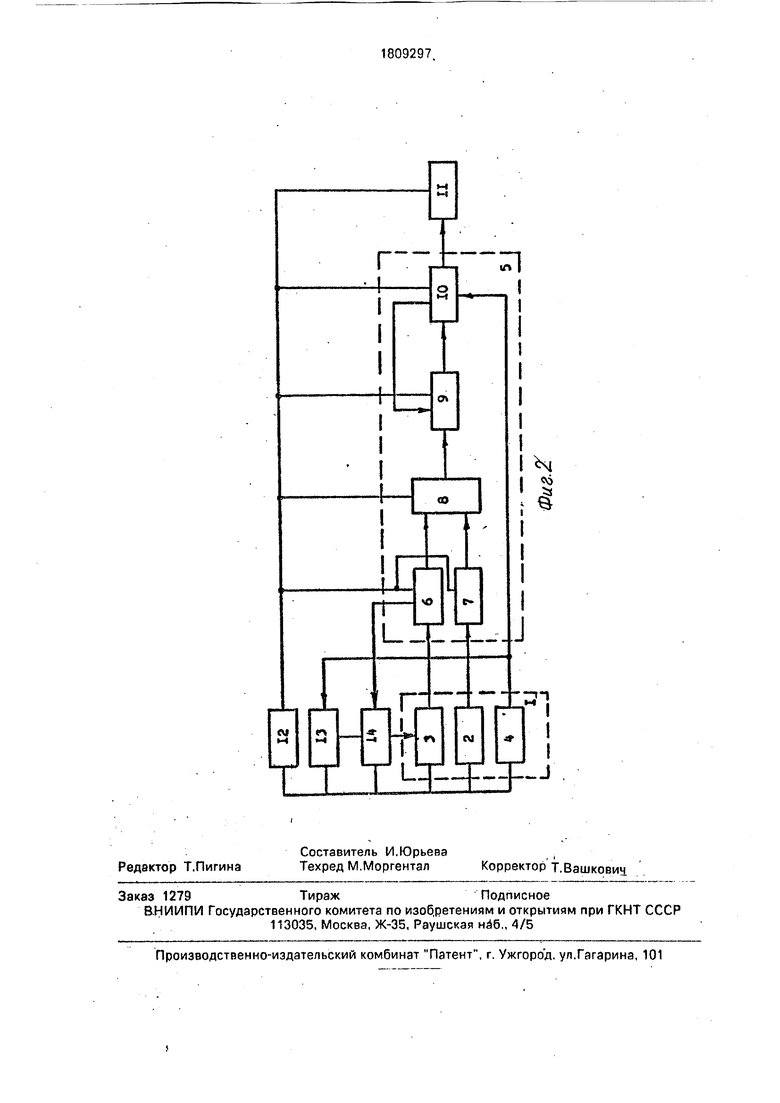
На фиг. 1 показана блок-схема устройства; на фиг. 2 -схема узла коррекции гиро- полукомпаса.
Устройство содержит систему первичных преобразователей 1, гировертикаль 2 для измерения углов отклонения оси трубопровода в вертикальной плоскости, гиро- полукомпас 3 - для измерения углов
отклонения в горизонтальной плоскости, одометр 4 - датчик пути для измерения пройденного пути на базе колесного генератора с бесконтактным прерывателем сигналов, Для обработки сигналов, поступающих от угломерных датчиков , используется сис- . тема вторичных преобразователей 5 в со- став.е: устройства согласующие 6 и 7 - для усиления и согласования уровня выходных сигналов, коммутатор аналоговых сигналов 8, аналого-цифровой преобразователь 9, преобразующий сигналы в цифровой код, и микропроцессорный контролер 10. Напряжение для запитки датчиков и преобразователей, а также регистратора 11 подается от. блока питания 12, в составе которого имеет
со
ю ю -ч
ся блок автоматики 13госуществляющий автоматическое включение и выключение устройства, а также защиту аккумуляторов от глубокого разряда.
Узел коррекции гирополукомпаса 14 состоит из трех компараторов 1$, 15 и 17, потенциометров - задатчиков уровней переключения компараторов 18, 19 и 20, инвертора 21, триггеров 22 и 23, трех схем И 24,25 и 26 и реле 27 и 28.
Устройство для измерения углов наклона протяженных объектов в горизонтальной и вертикальной плоскостях работает следующим образом.
Устройство загружается посредством камеры запуска s трубопровод в выключенном состояний. После закрытия крышки камеры запуска и подачи давления устройство начинает перемещаться по трубопроводу. При этом колвее одометра 4, опираясь посредством пружины из стенку трубопроводе, начинает ерэщатьея и за счет бесконтактной пвры-магнит-геркон генерирует импульсы, которые поступают на блок автоштмш 13. При поступлении заданного количества ишудьевв блок автоматики 13 включает set® аппаратуру устройства и подает кмяуяье а бшк вштомвтачвекой подстройки трогшдукомпвее 14. который уетаиашшшаат эайвииый начальный уроВыходные еягмаяы троевршкалм 2 и гмро- полукэмпаёв 3 усияйвштбя с немощью ео- ответстэудащйк согяаеушщик устройств 6 и 7 и nocTynator на коммутатор аналоговых сигналов 8 и далее на аивяого-цмфровой пр8о§рэзоват@йь 9, который преобразует аналоговые сигналы s цифровой код. Микропроцессорный контроллер 10 по импульсам, поступающим от одометра 4,- опрашивает все измерительные каналы и запоминает полученную информацию в буферном запоминающем устройстве. При заполнении буферной памяти контроллер
включает магнитный регистратор 11 и записывает информацию на магнитную ленту. Таким образом, магнитный регистратор 11 работает в экономичном старт-стопном режиме, что позволяет проводить обследование участков трубопроводов значительной протяженности. -При разряде аккумуляторных батарей, близком к предельному или при возникновении неисправностей в цепях питания, блок автоматики 13 автоматически выключает аппаратуру.
Повышение точности и протяженности обследования измерительных преобразователей достигается за счет применения устройст-в коррекции. В гировертикали используется электроконтактный уроенемер, смещение которого замыкает контакты и включает двигатели коррекции. В гиропо- лукомпасе применена схема автоматической подстройки,- в основу которой
положена взаимосвязь отклонений главной оси гироскопа с уровнем выходного сигнала. При включении питания выходы компараторов 15, 16 и 17 устанавливаются в состояния, определяемые уровнем выходного сигнала гирополукомпаса 3, где компараторы 15 и 17 отвечают соответственно верхнему и нижнему уровню заданного диапазона изменения, а компаратор 16-нулевому отклонению. Если при этом уровень
сигнала находится между заданным верхним и нижним порогами срабатывания, на выходах компаратора 15 и 17 устанавливается высокий уровень логической единицы, Если при этом уровень сигнала превышает
начальный уровень срабатывания, на выходе компараторе 16 также устанавливается
высокий уровень. По фронту импульса, поступающего через инвертор 21 из блоха автоматики на тактовые входы С, триггеров
11 и 23, последние устанавливаются в состояния, определяемые уровнем выходных сигналов компараторов. Поскольку на выходах компараторов 15 и 16 установлен высокий уровень, триггер 22 устанавливается по входу Д в единичное состояние и через элемент 25 включает реле 27-, которое, в свою очередь, включает своими контактами К1 двигатель коррекции. Уровень выходного сигнала гирополукомпаса 3 начинает измвняться в сторону заданного начального уровня. Когда уровень выходного сигнала сравияется.с начальным уровнем, переключится компаратор 16 м включит двигатель коррекции.
Если при включении питания-уровень выходного сигнала гирополукомпаса 3 устанавливается ниже начального уровня, триггер 23 включит реле 28, и, через контакты К2 соответствующий двигатель коррекции.
в процессе работы устройство, при выходе сигнала гирополукомпаса 3 за пределы заданного диапазона измерения, снова включится соответствующий двигатель коррекции и установится начальный уровень
выходного сигнала гирополукомпаса 3.
На выходе элемента 24 формируется сигнал, поступающий в регистратор и соответствующий моментам коррекции гирополукомпаса. .
Таким образом, узел коррекции 14 позволяет выставить заданный начальный уровень вцходного сигнала гирополукрмпа-, са в момент включения питания и поддерживать в заданном диапазоне изменение
выходного сигнала в процессе работы устройства, что значительно повышает точность и разрешающую способность измерения углов отклонения в горизонтальной плоскости, а также дает возможность использовать датчики типа гирополукомпаса для измерения положения трубопроводов по внутритрубной технологии в течение длительного времени.
Формула, изобретения
i. Устройство для измерения пространственного положения трубопроводов, содержащее платформу с размещенными на ней датчиками угла наклона-в горизонтальной и вертикальной плоскостях, датчик пройденного расстояния, систему вторичных преобразователей, входы которой соединены с выходами датчиков, и регистратор, отличающееся тем, что, с целью повышения точности и производительности измерений, оно снабжено корпусом с надетыми на его поверхность эластичными манжетами, предназначенными для базирования в трубопроводе, датчик угла наклона в вертикальной плоскости выполнен в виде гировертикали, датчик угла наклона в гормзбнтальнрй плоскости выполнен в виде гирополукомпаса, система вторичных преобразователей выполнена в виде двух согласующих усилителей,-соединенного с ними коммутатора, аналого-циф- рового преобразователя, подключенного к его выходу микроконтроллера; устройство также снабжено узлом коррекции гирополукомпаса,-первый вход которого соединен с выходом первого согласующего усилителя, а выход - с входом гирополукомпаса,. блоком автоматики, вход которого соединен с
выходом датчика пути, а выход с вторым входом блока коррекции гирополукомпаса, платформа выполнена с независимой маятниковой подвеской и расположена в корпу- се;
2. Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что узел коррекции гирополукомпаса выполнен в виде трех компараторов, трех подстроечных резисторов, двух О-тригге-Г
ров, инвертора, схемы И, двух буферных элементов, двух реле и двигатели коррекции, инвертирующие входы второго и третьего компараторов, неинвертирующий вход первого компаратора через подстроенные
резисторы подключены к источнику питания, инвертирующий вход первого компаратора объединен с нёинвертирующими входами второго и третьего компараторов и является первым входом узла коррекции гирополукомпаса, выход второго компаратора соединен с R-входом первого D-триггера, D-входом второго D-триггера И входом инвертора, выход которого соединен с S-вхо- дом второго D-триггера, С-входы
D-триггеров объединены и являются вторым входом узла коррекции,-выход первого компаратора соединен с S- и D-входами первого Огтриггера, выход третьего компаратора соединен с R-входом второго D-триггера,
прямой выход которого соединен с входом второго буферного элемента и первым вх р- дом схемы И, второй вход-которой объединен с входом первого буферного элемента и соединен с инверсным выходом первого Dr
триггера, выходы буферных элементов соединены с обмотками первого и второго реле, контакты которых включены в цепь управления двигателем коррекции гирополукомпаса. . ; . .... 


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления креновой рамой курсовертикали | 2022 |
|
RU2796075C1 |
| Устройство контроля характеристик электрических сигналов | 1984 |
|
SU1211676A1 |
| Устройство для ориентирования отклонителя | 1986 |
|
SU1368431A1 |
| Устройство для автоматического контроля геометрических размеров объекта при деформации | 1983 |
|
SU1219915A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| Устройство программного управления металлорежущими станками | 1985 |
|
SU1259215A1 |
| Устройство для измерения деформации клети прокатного стана | 1990 |
|
SU1768946A1 |
| Устройство измерения угла поворота летательного аппарата в горизонтальной плоскости | 2023 |
|
RU2805424C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2010 |
|
RU2437127C1 |
| УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР-СЧЕТЧИК ГАЗА | 2007 |
|
RU2336499C1 |
Изобретение относится к измерительной технике и позволяет измерять радиусы , кривизны и положение трубопровода в вертикальной и горизонтальной плоскостях при стабильном поддержании заданной точности измерений на протяженных участках об- следуемых трубопроводов. Цель изобретения - повышение точности и производительности измерений. При перемещении устройства по внутренней полости трубопровода сигналы, поступающие от датчика пути, формируют команду на опрос датчиков угла наклона в горизонтальной и вертикальной плоскостях с заданной частотой посредством блока автоматики. Через систему вторичных преобразователей и микропроцессор сигналы в цифровом коде поступают на магнитный регистратор длительной памяти, Блок электронной коррекции осуществляет автоматическую подстройку гидрополукомпаса в процессе его работы посредством компараторов и элементов И. 1 з. п. ф-лы. 2 ил. ел с
| Устройство для измерения профиля местности | 1976 |
|
SU661235A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ РАЗРАБОТКИ МАЛЫХ КИМБЕРЛИТОВЫХ ТРУБОК | 2008 |
|
RU2426882C2 |
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
