Изобретение относится к точному приборостроению, а именно к гироскопической технике, и может быть использовано для измерения угла поворота летательного аппарата при маневрах в горизонтальной плоскости.
Известно устройство измерения угла поворота летательного аппарата в горизонтальной плоскости, которое реализовано в различных типах гирополукомпасов и, в частности, в гирополукомпасе ГПК-52АП (Михайлов О.И., Козлов И.М., Гергель Ф.С. Авиационные приборы. М.: Машиностроение, 1977, стр. 166). Гирополукомпас ГПК-52АП состоит из трехстепенного гироскопа с осью наружной рамы, расположенной параллельно нормальной оси летательного аппарата, содержащем системы горизонтальной и азимутальной коррекций, системный датчик курсового угла, ротор которого жестко закреплен на оси наружной рамы, а статор - на корпусе. Указатель дистанционно подключен к системному датчику курсового угла.
Однако при выполнении поворота в горизонтальной плоскости (вираже) ось наружной рамы гирополукомпаса, ориентированная по нормальной оси, будет отклоняться от вертикали места на угол крена. При этом возникает погрешность, которая носит геометрический характер, и называется кардановой погрешностью
 (1)
(1)
где  угол поворота в горизонтальной плоскости;
угол поворота в горизонтальной плоскости;  угол крена;
угол крена;  кардановая погрешность.
кардановая погрешность.
Известно также устройство измерения угла поворота летательного аппарата в горизонтальной плоскости, принятое за прототип и реализованное в различных типах курсовых систем, например, в курсовой системе КС-6, в которой гирополукомпас (гироагрегат ГА-1М) наружной рамой установлен в следящую раму, корректируемую по сигналам гировертикали по углу крена (Аппаратура измерения курса и вертикали на воздушных судах гражданской авиации / Ю.А. Акиндеев, В.Г. Воробьев, А.А. Карчевский и др.; Под общ. ред. П.А. Иванова. М.: Машиностроение, 1989. -344с. Стр.89-93). Гироагрегат ГА-1М состоит из трехстепенного гироскопа, содержащего системы горизонтальной и азимутальной коррекций, с осью наружной рамы, кинематически помещенной в следящую раму, на оси подвеса которой установлены датчик угла и двигатель отработки и которая параллельна продольной оси летательного аппарата. Системный датчик курсового угла состоит из ротора, жестко закрепленного на оси наружной рамы, и статора - на следящей раме. Для компенсации кардановой погрешности ось наружной рамы стабилизируется на местной вертикали с помощью следящей системы, управляемой по сигналу системного датчика крена гировертикали. При этом разностный сигнал системного датчика крена гировертикали и датчика угла следящей рамы подключают на вход усилителя, выход которого соединяют с двигателем отработки, который и разворачивает ось наружной рамы гироагрегата в вертикальное положение, при котором кардановая погрешность практически отсутствует. Указатель дистанционно подключен к системному датчику курсового угла.
Недостатком прототипа, как измерителя угла поворота летательного аппарата, является значительная сложность электромеханической части конструкции, которая обеспечивает компенсацию кардановой погрешности, что снижает надежность работы курсового гироагрегата в целом.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в упрощении конструкции схемы компенсации кардановой погрешности и в повышении надежности работы путем использования информации двух штатных датчиков угловых скоростей летательного аппарата.
Технический результат достигается тем, что в устройстве измерения угла поворота летательного аппарата в горизонтальной плоскости, состоящем из гирополукомпаса, содержащего трехстепенной гироскоп с системами горизонтальной и азимутальной коррекций, на оси наружной рамы которого закреплен системный датчик угла курса, гировертикали и указателя курсового угла, новым является то, что оно содержит первый и второй датчики угловых скоростей, оси чувствительности которых соответственно направлены по нормальной и поперечной осям летательного аппарата, задатчик угла допустимого крена и микроконтроллер, при этом системный датчик угла курса, системный датчик угла крена гировертикали, выходы первого и второго датчика угловых скоростей и задатчик допустимого угла крена через первый-пятый преобразователи аналог-код подключены соответственно на первый-пятый входные порты микроконтроллера, а его выходной порт соединен с указателем курсового угла, при этом угол поворота летательного аппарата в горизонтальной плоскости вычисляется в микроконтроллере по формулам, структура которых зависит от величины крена летательного аппарата.
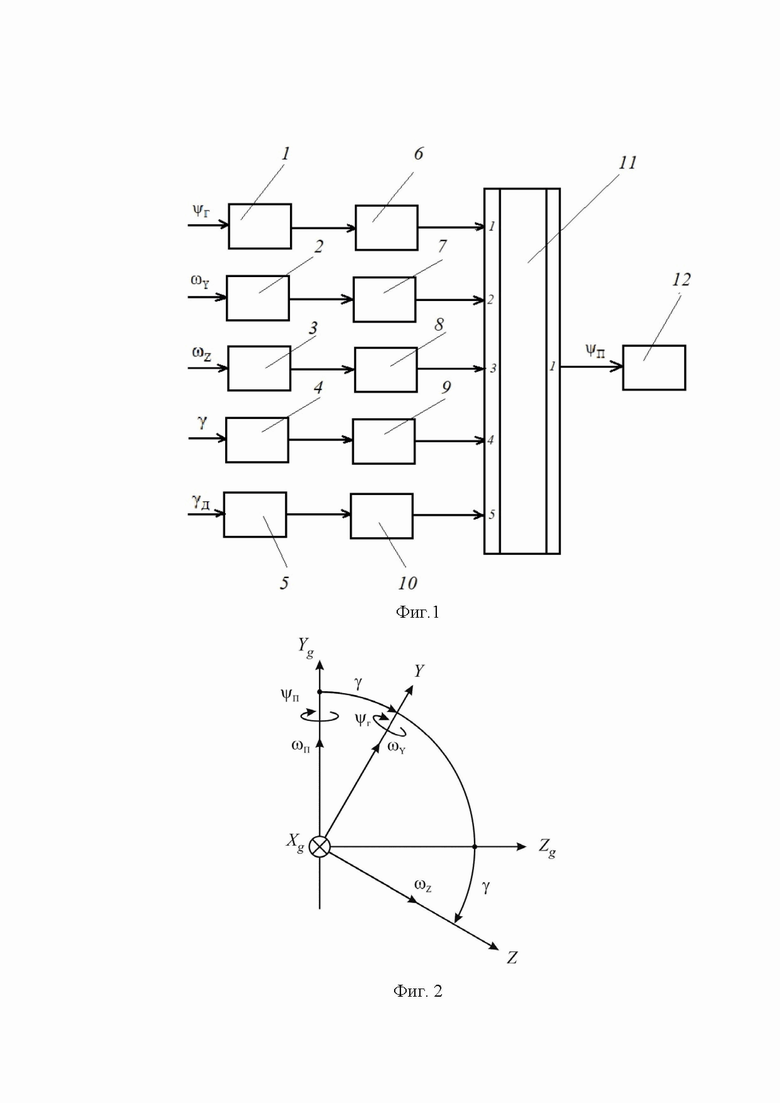
Существо изобретения поясняется чертежами, приведенными на фиг.1 и фиг.2.
На фиг.1, на которой приведена блок-схема устройства, и фиг. 2, на которой приведены системы координат и кинематические параметры, приняты следующие обозначения:
1 - системный датчик курсового угла гирополукомпаса;
2 - первый датчик угловой скорости;
3 - второй датчик угловой скорости;
4 - системный датчик угла крена гировертикали;
5 - задатчик допустимого угла крена;
6 - первый преобразователь аналог-код;
7 - второй преобразователь аналог-код;
8 - третий преобразователь аналог-код;
9 - четвертый преобразователь аналог-код;
10 - пятый преобразователь аналог-код;
11 - микроконтроллер;
12 - указатель курсового угла.
Буквенные обозначения:
 ось местной вертикали;
ось местной вертикали;
 плоскость местного горизонта;
плоскость местного горизонта;
 нормальная ось летательного аппарата;
нормальная ось летательного аппарата;
 поперечная (боковая) ось летательного аппарата;
поперечная (боковая) ось летательного аппарата;
 угол поворота летательного аппарата в горизонтальной плоскости;
угол поворота летательного аппарата в горизонтальной плоскости;
 угол поворота летательного аппарата относительно нормальной оси;
угол поворота летательного аппарата относительно нормальной оси;
 угол крена летательного аппарата;
угол крена летательного аппарата;
 допустимый угол крена летательного аппарата;
допустимый угол крена летательного аппарата;
 угловая скорость поворота летательного аппарата относительно оси местной вертикали;
угловая скорость поворота летательного аппарата относительно оси местной вертикали;
 угловая скорость летательного аппарата относительно нормальной оси;
угловая скорость летательного аппарата относительно нормальной оси;
 угловая скорость летательного аппарата относительно поперечной оси.
угловая скорость летательного аппарата относительно поперечной оси.
Описание работы устройства, блок-схема которого приведена на фиг.1, будем рассматривать в горизонтальном полете летательного аппарата с учетом обозначений, приведенных на фиг.2.
В соответствии с блок-схемой гирополукомпас 1 не имеет следящей системы для компенсации кардановой погрешности, поэтому ее системный датчик курса измеряет угол поворота летательного аппарата  вокруг нормальной оси
вокруг нормальной оси  Штатные датчики угловых скоростей: первый 2, измеряет угловую скорость
Штатные датчики угловых скоростей: первый 2, измеряет угловую скорость  вокруг нормальной оси
вокруг нормальной оси  и второй 3, измеряет угловую скорость
и второй 3, измеряет угловую скорость  вокруг поперечной оси
вокруг поперечной оси  Системный датчик угла крена гировертикали 4 измеряет крен
Системный датчик угла крена гировертикали 4 измеряет крен  летательного аппарата. Задатчик допустимого угла крена 5 ограничивает непосредственное использование сигнала системного датчика гирополукомпаса 1 при разворотах летательного аппарата. Для преобразования измеренных сигналов в двоичный код служат преобразователи аналог-код
летательного аппарата. Задатчик допустимого угла крена 5 ограничивает непосредственное использование сигнала системного датчика гирополукомпаса 1 при разворотах летательного аппарата. Для преобразования измеренных сигналов в двоичный код служат преобразователи аналог-код  При этом преобразователь 6 является специальным (преобразователь отношений напряжений), так как преобразует сигнал с синусно-косинусного трансформатора - датчика курсового угла. Преобразователи
При этом преобразователь 6 является специальным (преобразователь отношений напряжений), так как преобразует сигнал с синусно-косинусного трансформатора - датчика курсового угла. Преобразователи  являются преобразователями сигналов постоянного напряжения в двоичный код и могут представлять собой отдельные схемотехнические элементы или быть встроенными в микроконтроллер 11. Информацию об угле поворота летательного аппарата в горизонтальной плоскости
являются преобразователями сигналов постоянного напряжения в двоичный код и могут представлять собой отдельные схемотехнические элементы или быть встроенными в микроконтроллер 11. Информацию об угле поворота летательного аппарата в горизонтальной плоскости  микроконтроллер 11 выводит на указатель 12, например, электронного типа.
микроконтроллер 11 выводит на указатель 12, например, электронного типа.
Оси  образуют нормальную систему координат. Ось
образуют нормальную систему координат. Ось  направлена по местной вертикали, а оси
направлена по местной вертикали, а оси  и
и  занимают произвольное положение в горизонтальной плоскости. В соответствии с фиг.2 продольная ось летательного аппарата направлена перпендикулярно чертежу от нас и параллельна горизонтальной оси
занимают произвольное положение в горизонтальной плоскости. В соответствии с фиг.2 продольная ось летательного аппарата направлена перпендикулярно чертежу от нас и параллельна горизонтальной оси  . При этом летательный аппарат совершает поворот с креном
. При этом летательный аппарат совершает поворот с креном  и угловой скоростью
и угловой скоростью  , проекции которой на оси
, проекции которой на оси  и
и  равны
равны  и
и  соответственно.
соответственно.
На фиг.2 показаны положительные направления угловых скоростей, при этом в зависимости от знака угла крена  угловые скорости будут иметь следующие знаки:
угловые скорости будут иметь следующие знаки:
- при  (правый вираж) -
(правый вираж) -  ,
,  ,
,  ;
;
- при  (левый вираж) -
(левый вираж) -  ,
,  ,
,  ,
,
а угловая скорость поворота (виража) в соответствии с измеренными  определяется по формуле
определяется по формуле

Работа устройства в горизонтальном прямолинейном полете.
Микроконтроллер 11 в первую очередь опрашивает преобразователи 9 и 10 аналог-код датчика угла крена гировертикали 4 и задатчика допустимого угла крена 5, преобразователь 6 системного датчика курсового угла гирополукомпаса 1, записывает информацию в соответствующие ячейки памяти и проверяет выполнение условия  .
.
В горизонтальном прямолинейном полете крен летательного аппарата, который обуславливается динамическими ошибками при работе автопилота или ручного управления, всегда будет удовлетворять условию  , и при правильном задании
, и при правильном задании  , значение которого достаточно взять в диапазоне
, значение которого достаточно взять в диапазоне  , максимальная кардановая погрешность, вычисленная по формуле (1), будет меньше
, максимальная кардановая погрешность, вычисленная по формуле (1), будет меньше  . В действительности амплитуда колебаний летательного аппарата по крену значительно меньше
. В действительности амплитуда колебаний летательного аппарата по крену значительно меньше  и кардановая погрешность будет значительно меньше
и кардановая погрешность будет значительно меньше  . Поэтому судить об угле поворота в горизонтальной плоскости вокруг оси местной вертикали
. Поэтому судить об угле поворота в горизонтальной плоскости вокруг оси местной вертикали  достаточно использовать информацию о повороте вокруг нормальной оси летательного аппарата
достаточно использовать информацию о повороте вокруг нормальной оси летательного аппарата  . Т.е. в этом случае на указатель курсового угла 12 микроконтроллер выдает в реальном масштабе времени информацию в виде
. Т.е. в этом случае на указатель курсового угла 12 микроконтроллер выдает в реальном масштабе времени информацию в виде  где
где  аналог дискретного времени (соответствует очередному циклу опроса).
аналог дискретного времени (соответствует очередному циклу опроса).
Работа устройства в горизонтальном полете с разворотом на произвольный угол.
В этом случае команда на разворот подается в виде сигнала  (заданный крен) в автопилот, или формируется отклонением рукоятки управления летчиком. Летательный аппарат начинает разворот с заданным креном. Так как при развороте
(заданный крен) в автопилот, или формируется отклонением рукоятки управления летчиком. Летательный аппарат начинает разворот с заданным креном. Так как при развороте  , то микроконтроллер начинает дополнительно опрашивать преобразователи 7 и 8 первого 2 и второго 3 датчиков угловых скоростей. При этом максимальное значение кардановой погрешности может достигать более
, то микроконтроллер начинает дополнительно опрашивать преобразователи 7 и 8 первого 2 и второго 3 датчиков угловых скоростей. При этом максимальное значение кардановой погрешности может достигать более  и поэтому формировать для указателя угол поворота в виде
и поэтому формировать для указателя угол поворота в виде  недопустимо. При этом микроконтроллер 11 в реальном масштабе времени производит следующие действия:
недопустимо. При этом микроконтроллер 11 в реальном масштабе времени производит следующие действия:
1. запоминает значение угла системного датчика курса гирополукомпаса 1 на момент начала разворота  ;
;
2. вычисляет на каждом шаге  тригонометрические функции
тригонометрические функции  ;
;
3. используя значения опрошенных первого 2 и второго 3 датчиков угловых скоростей, формируют приращение курсового угла в горизонтальной плоскости по формуле
 , (2)
, (2)
где  величина длительности цикла работы программы в микроконтроллере, которая обеспечивает измерения и вычисления в реальном масштабе времени;
величина длительности цикла работы программы в микроконтроллере, которая обеспечивает измерения и вычисления в реальном масштабе времени;
4. вычисляет угол поворота летательного аппарата по формуле
 ,
,
где  количество итераций при выполнении поворота с условием
количество итераций при выполнении поворота с условием 
Так как разворот происходит непродолжительное время, обычно десятки секунд, то за счет операции численного интегрирования (2) накопится незначительная погрешность, которая будет меньше кардановой погрешности.
Предлагаемое устройство позволяет упростить схему компенсации кардановой погрешности, заменив электрокинематическую следящую систему с дополнительной рамой, электронной системой с микроконтроллером, входными сигналами которого являются сигналы штатных датчиков летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения угла поворота летательного аппарата в горизонтальной плоскости | 2023 |
|
RU2805425C1 |
| Гирополукомпас с аналитической азимутальной коррекцией | 2023 |
|
RU2799738C1 |
| Гирополукомпас | 2024 |
|
RU2826371C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| Гирополукомпас с компенсацией температурного дрейфа | 2024 |
|
RU2818661C1 |
| Устройство управления креновой рамой курсовертикали | 2022 |
|
RU2796075C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2316730C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
Устройство измерения угла поворота летательного аппарата в горизонтальной плоскости содержит гирополукомпас, содержащий трехстепенный гироскоп с системами горизонтальной и азимутальной коррекций, на оси наружной рамы которого закреплен системный датчик угла курса, гировертикали и указателя курсового угла, два датчика угловых скоростей, задатчик допустимого угла крена, микроконтроллер, соединенные определенным образом. Обеспечивается повышение надежности измерений. 2 ил.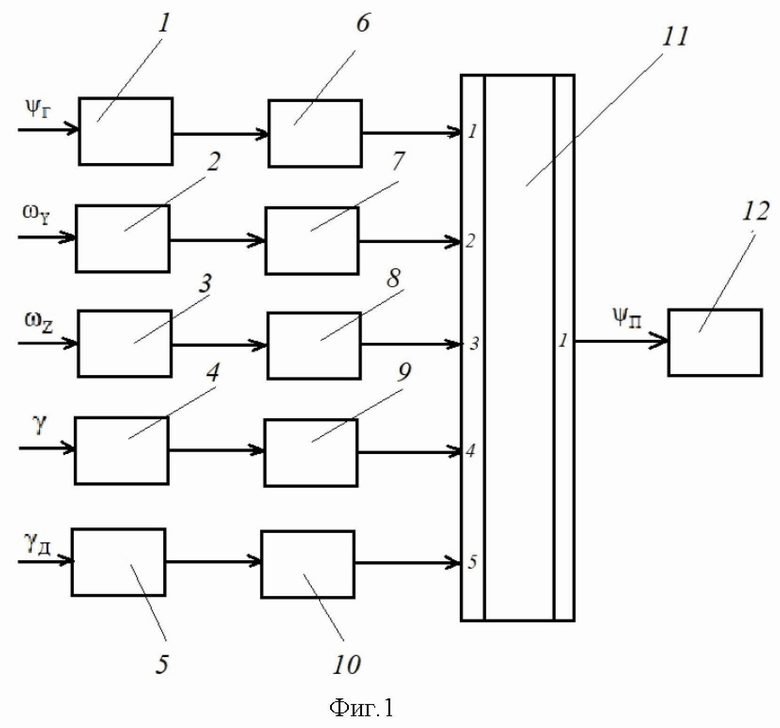
Устройство измерения угла поворота летательного аппарата в горизонтальной плоскости, состоящее из гирополукомпаса, содержащего трехстепенный гироскоп с системами горизонтальной и азимутальной коррекций, на оси наружной рамы которого закреплен системный датчик угла курса, гировертикали и указателя курсового угла, отличающееся тем, что оно содержит первый и второй датчики угловых скоростей, оси чувствительности которых соответственно направлены по нормальной и поперечной осям летательного аппарата, задатчик допустимого угла крена и микроконтроллер, при этом системный датчик угла курса, системный датчик угла крена гировертикали, выходы первого и второго датчика угловых скоростей и задатчик допустимого угла крена через первый-пятый преобразователи аналог-код подключены соответственно на первый-пятый входные порты микроконтроллера, а его выходной порт соединен с указателем курсового угла, при этом угол поворота летательного аппарата в горизонтальной плоскости вычисляется в микроконтроллере по формулам, структура которых зависит от величины крена летательного аппарата.
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| Устройство управления креновой рамой курсовертикали | 2022 |
|
RU2796075C1 |
| Гирокомпас | 1991 |
|
RU2000542C1 |
| US 4375726 A1, 08.03.1983 | |||
| JP 11263232 A, 28.09.1999 | |||
| СПОСОБ РЕСТАВРАЦИИ ЭЛЕКТРОВАКУУМНЫХ СВЧ-ПРИБОРОВ БОЛЬШОЙ МОЩНОСТИ | 2003 |
|
RU2244979C1 |
