Изобретение относится к общему машиностроению, в частности к механизмам для осуществления прерывистого вращения.
Целью изобретения является повышение точности фиксирования и надежности работы.
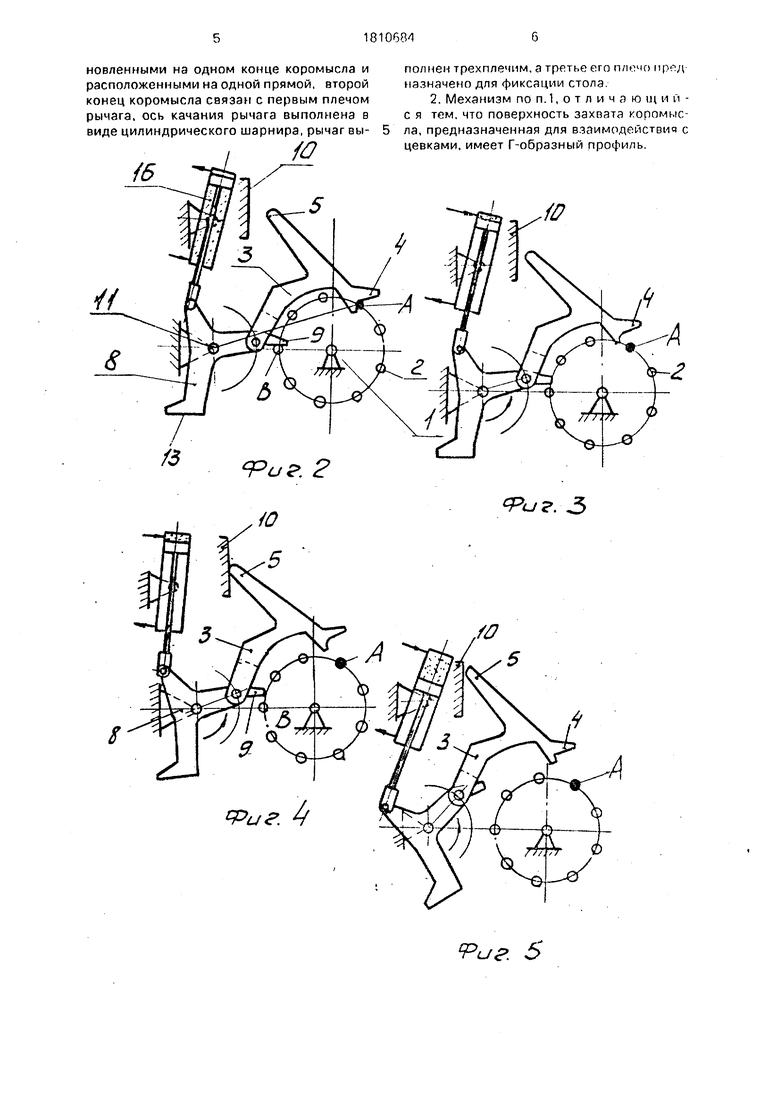
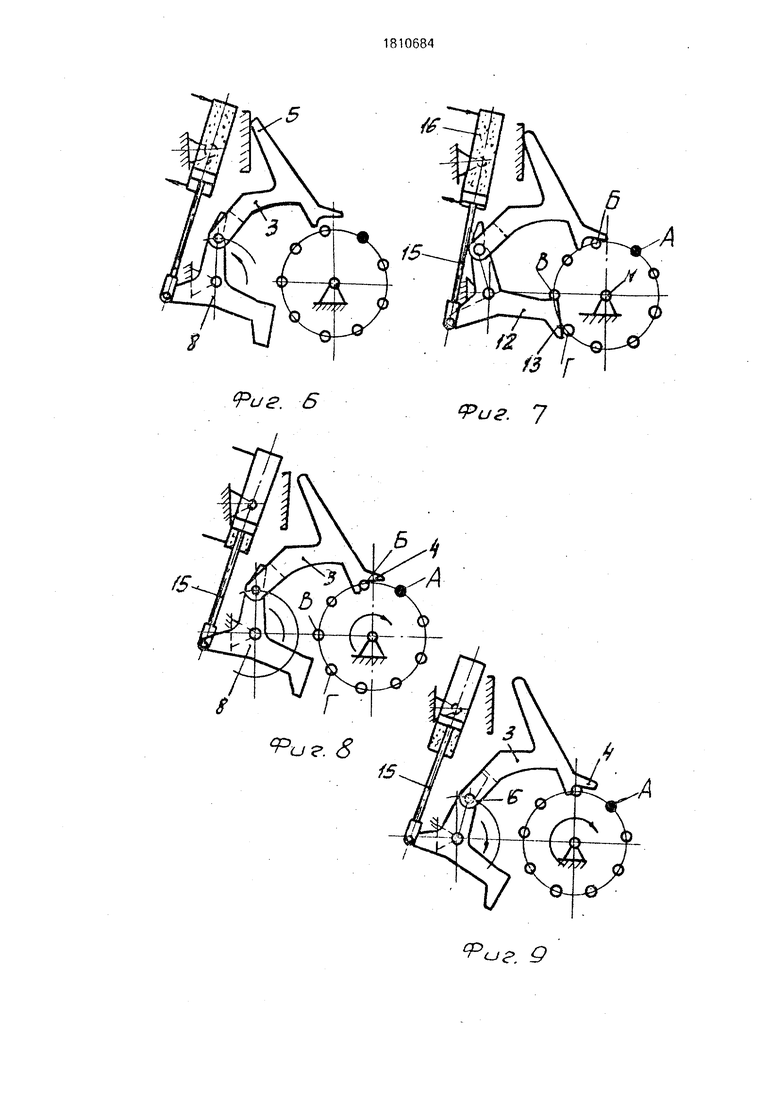
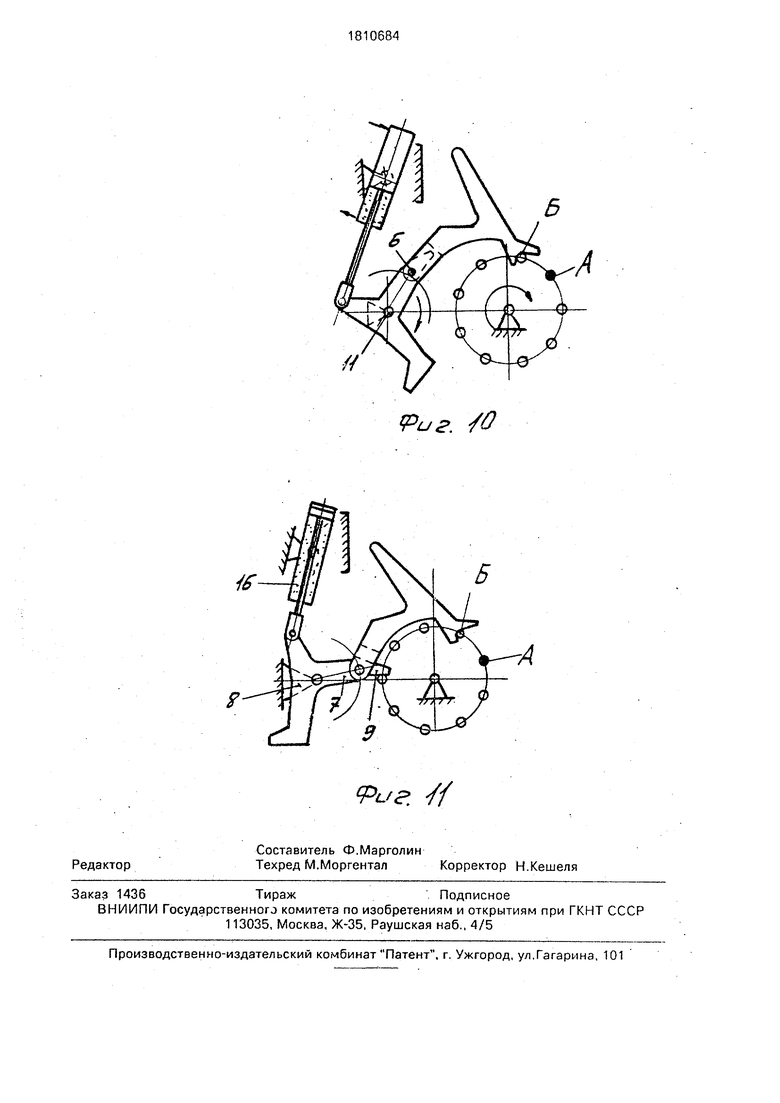
На.фиг. 1 представлен поворотно-фик- сирующий механизм, общий вид(штриховы- ми линиями показано промежуточное положение механизма); на фиг.2 - исходное положение механизма; на фиг.З, 4 - выход захвата в радиальном направлении из зацепления с цевкой А; нафиг.5, 6 -тангенциальное движение захвата относительно цевок стола; на фиг.7 - начало втягивания штока и вхождение захвата в контакт с цевкой Б и фиксация стола фиксатором третьего плеча рычага; на фиг.З - захват цевки Б и начало рабочего хода стола; на фиг.9, 10 - рабочий ход стола; на фиг.11 - окончание рабочего хода стола и фиксация его свободным концом первого плеча рычага.
Поворотно-фиксирующий механизм содержит корпус, в котором шарнирно установлено ведомое звено в виде стола 1с цевками 2, коромысло 3, на одном конце которого установлены захват 4 и хвостовик 5, расположенные на одной прямой. Поверхность захвата 4 коромысла 3, предназначенная для взаимодействия с цевками 2, имеет Г-образный профиль. Второй конец коромысла 3 соединен шарнирным узлом 6 трения с первым плечом 7 рычага 8, свободный конец 9 которого периодически (в исходном положение) взаимодействует с цевками 2 стола 1.
Поворотнй-фиксирующий механизм также содержит упор 10, предназначенный для взаимодействия с коромыслом 3.
Рычаг 8 имеет ось качания в виде цилиндрического шарнира 11 и снабжен третьим плечом 12 с фиксатором 13 на свободном конце.
Второе плечо 14 рычага 8 шарнирно соединено со штоком 15 качающегося привода поступательного движения в виде пневмоцилиндра 16,.
Поворотно-фиксирующий механизм работает следующим образом. Поворот стола 1 осуществляется путем передачи усилий цевкам 2 коромыслом 3 от привода 16 через рычаг 8. При выдвижении штока 15 привода 16 происходит совместное движение рычага
8 вокруг цилиндрического шарнира 11 с коромыслом 3, при этом от цевок 2 в положении А отводится захват4 и свободный конец
9 первого плеча 7 рычага 8. Отвод захвата 4 и конца 9 рычага 8 продолжается до соприкосновения хвостовика 5 коромысла 3 с упором 10, после чего захват коромысла 3 совершает сложное плоско-параллельное движение с поворотом против часовой стрелки относительно оси поворота стола 1 с конечным положением, которое показано на фиг.1 штрихом, при этом в конечном, выдвинутом, положении штока 15 пневмоцилиндра 16 третье плечо 12 рычага 8 своим фиксатором 13 фиксирует положение стола
1 путем упора в виде цевки в положении Г и В (см. фиг.7).
При втягивании штока 15 привода 16 происходит совместное движение рычага 8 и коромысла 3 по часовой стрелке через
шарнирный узел трения 6 до момента соприкосновения захвата 4 с очередной цевкой 2 в положении Б. При вхождении захвата 4 в зацепление с цевкой 2 в положении Б, последняя выполняет роль опорного
шарнира коромысла 3. Это начало рабочего хода стола 1, поворот. В конце рабочего хода стола 1 свободный конец 9 первого плеча 7 рычага 8 входит в соприкосновение с цевкой 2 в положении В и жестко фик.сирует стол 1 в заданной позиции. Цилиндрический шарнир 11, шарнирный узел 6 трения и цевка 2 в положении Б располагаются на одной линии, в результате чего угловая скорость поворота стола 1 равна нулю, происходит кинематическое торможение поворотной массы стола 1. В случае, если скорость в конце поворота не будет полностью погашена, цевка 2 в положении В, воздействуя на свободный конец 9 первого
плеча 7 рычага 8 поворачивает рычаг 8 против часовой стрелки, вытесняя воздух из штоковой полости пневмоцилиндра 16, при этом привод работает в тормозном режиме.
Реализация поворотно-фиксирующего механизма позволит повысить надежность работы и точность фиксирования. Ф о р му л а и з.о б р е т е н и я 1. Поворотно-фиксирующий механизм,
содержащий корпус, установленные в нем ведомое звено, двуплечий рычаг, одно плечо которого предназначено для периодического взаимодействия с ведомым звеном, привод, выполненный о виде пневмоцилиндра,
шток которого шарнирнго связан с вторым плечом рычага, коромысло, шарнирно связанное с рычагом, и упор, предназначенный для взаимодействия с коромыслом, отличающийся тем, что, с целью повышения
точности фиксирования и повышения надежности, ведомое звено выполнено в виде стола с цевками, механизм снабжен захватов, предназначенным для взаимодействия с цевками и хвостовиком, предназначен- ным для взаимодействия с упором, установленными на одном конце коромысла и расположенными на одной прямой, второй конец коромысла связан с первым плечом рычага, ось качания рычага выполнена в виде цилиндрического шарнира, рычаг выполнен трехплечим, а третье его плечо предназначено для фиксации стола.
2. Механизм по п. 1, о т л и ч а ю щ и и - с я тем, что поверхность захвата коромысла, предназначенная для взаимодействия с цевками, имеет Г-образный профиль.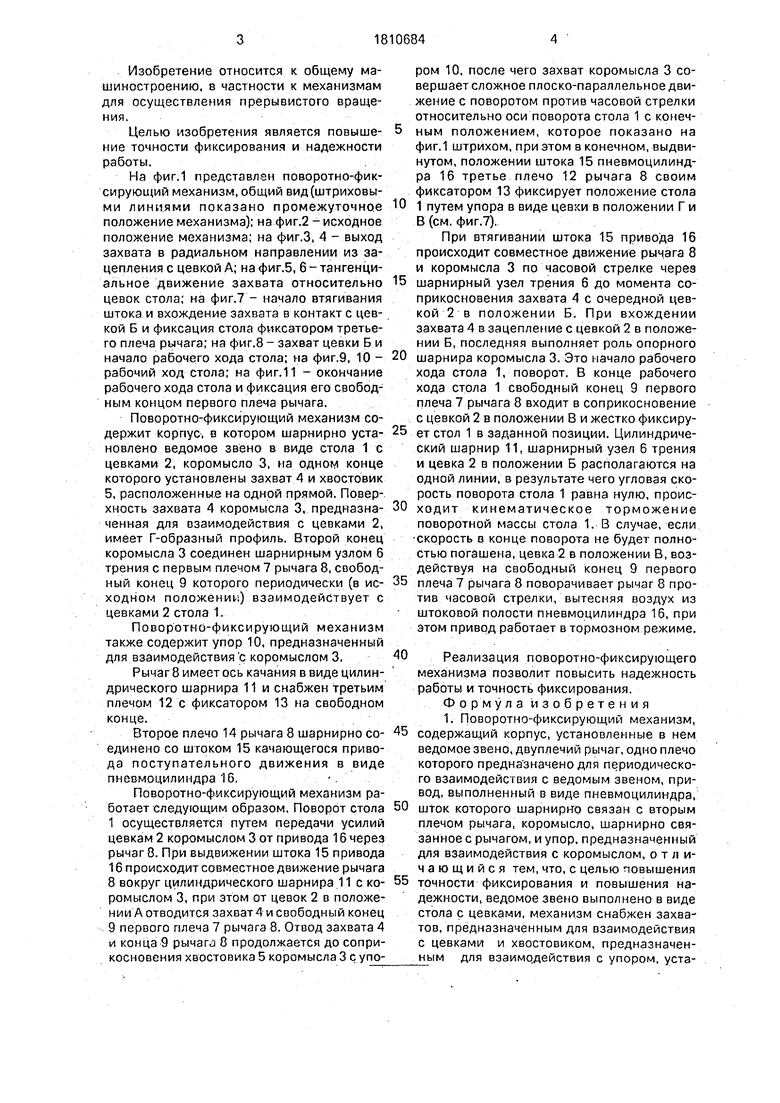
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство прерывистого вращения | 1989 |
|
SU1703896A1 |
| Подъемник | 1988 |
|
SU1586994A1 |
| Устройство для укладки в пакет металлических чушек | 1982 |
|
SU1066922A1 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
| Устройство для загрузки плоских изделий,преимущественно заготовок радиодеталей | 1985 |
|
SU1307619A1 |
| ДЕЛИТЕЛЬНЫЙ МЕХАНИЗМ ПОВОРОТНОГО СТОЛА | 1970 |
|
SU266522A1 |
| Линия для производства формового хлеба | 1980 |
|
SU938878A1 |
| Автоматическая роторная линия для сборки и сварки металлоконструкций | 1978 |
|
SU766801A1 |
| Устройство для фиксации | 1980 |
|
SU984793A1 |
| АВТОМАТИЧЕСКАЯ УПАКОВОЧНАЯ МАШИНА ПРЕИМУЩЕСТВЕННО ДЛЯ ЖИДКИХ И ПОЛУЖИДКИХ ПРОДУКТОВ | 1998 |
|
RU2138427C1 |
Изобретение относится к общему машиностроению, в частности к механизмам для осуществления прерывистого вращения. Цель - повышение точности фиксирования и повышение надежности. Поворотно-фик- сирующий механизм содержит корпус, в ко16 тором установлены ведомое звено в виде стола 1 с цевками 2, трехплечий рычаг 8, одно плечо которого предназначено для периодического взаимодействия с ведомым звеном, привод в виде пневмоцилиндра 16, шток которого шарнирно связан с вторым плечом 14 рычага 8, коромысло 3, на одном конце и на одной прямой которого расположены захват 4, предназначенный для взаимодействия с цевками, и хвостовик 5, предназначенных для взаимодействия с упором 10. Второй конец коромысла 3 связан с первым плечом рычага 8, ось качания которого выполнена в виде цилиндрического шарнира 11. Третье плечо 12 рычага 8 предназначено для фиксации стола 1. Поверхность захвата коромысла 3, предназначенная для взаимодействия с цевками 2, имеет Г-образный профиль. 1 з.п. ф-лы, 11 ил. 5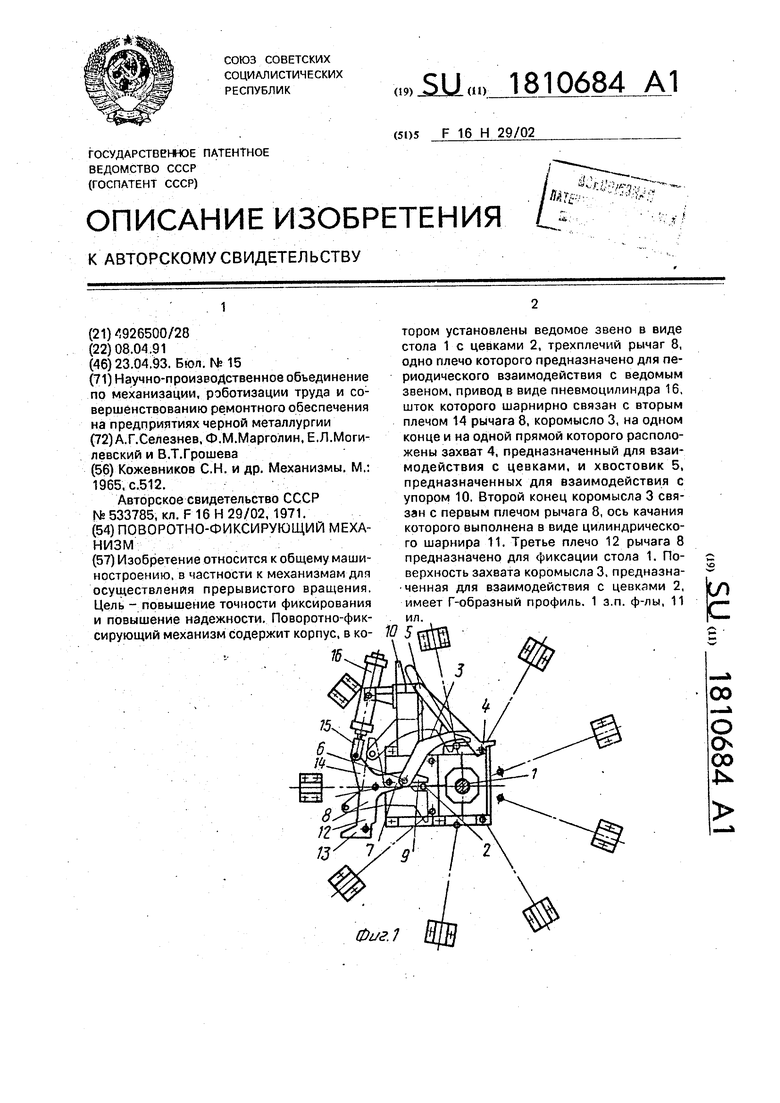
Фиг. 5
Фиг. 9
Фиг. SO
| Кожевников С.Н | |||
| и др | |||
| Механизмы | |||
| Приводный механизм в судовой турбинной установке с зубчатой передачей | 1925 |
|
SU1965A1 |
| Храповой механизм | 1971 |
|
SU533785A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
