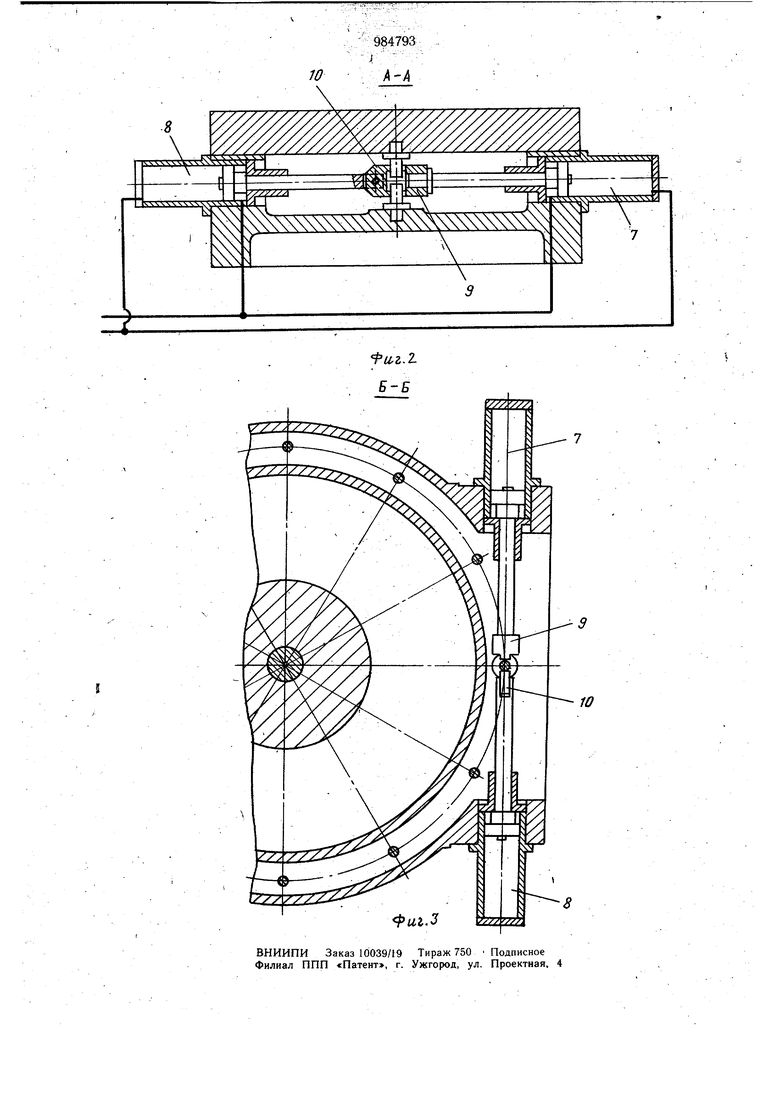
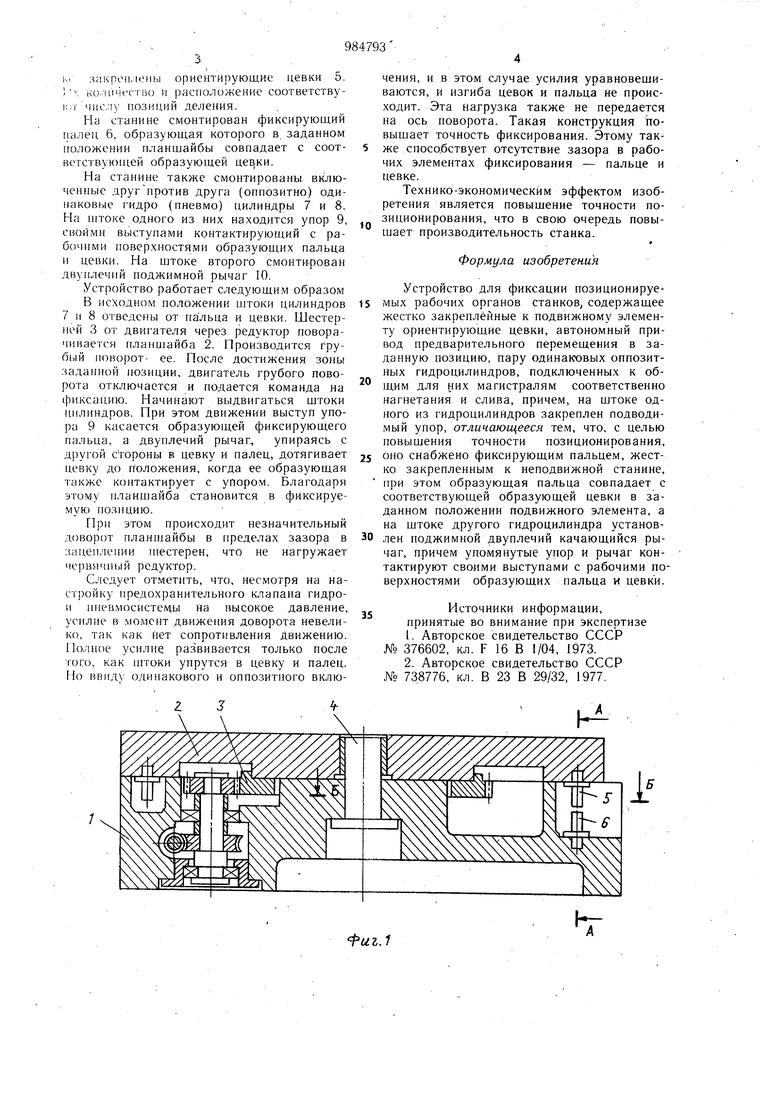
Изобретение относится к станкостроению и может быть использовано в конструкциях подвижных суппортов, салазок, пинолей, поворотных делительных столов и револьверных головок и т. п. устройств. Известно устройство, в котором механизм управления фиксатором выполнен в виде двух подпружиненных плунжеров, взаимодействующих с двуплечим рычагом 1 Этот механизм увеличивает надежность срабатывания фиксатора, однако время позиционирования так же велико, так как этап реверсирования не исключен из цикла. Наиболее близким по технической сущности к предлагаемому является механизм поворота револьверной головки, содержащий жестко закрепленные к подвижному ориентирующие цевки, автономный привод предварительного перемещения в заданную позицию, пару одинаковых оппозитных гидроцилиндров, подключенных к общим для Них магистралям соответственно нагнетания и слива, причем на штоке одного из гидроцилиндров закреплен подводимый упор 21. Недостатком известного механизма является невысокая точность позиционирования рабочих органов. Цель изобретения - повышение точности позиционирования. Доставленная цель достигается тем, что устройство снабжено фиксируюшим пальцем, жестко закрепленным к неподвижной станине, при этом образующая пальца совпадает с соответствующей образующей цевки в заданном положении подвижного элемента, а на штоке другого гидроцилиндра установлен поджимной двуплечий качающийся рычаг, контактирующий своими выступами с рабочими поверхностями образующих пальца и цевки. На фиг. 1 изображен разрез по оси поворота стола; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1. Поворотный стол имеет станину 1, на которой поворачивается планшайба 2. Привод г.рубого поворота производится от двигателя (не показан) через червячный редуктор и щестерню 3, закрепленную На планшайбе. Осью поворота служит смонтированная на станине цилиндрическая цапфа 4. К подвижному элементу - планшайбе жесткг з;1Кроп.11М1Ы ориентирующие цевки 5. .v количество и расположение соответству|;;г 4iic.;iy позиций деления. На станине емонтирован фиксирующий палеи 6, образующая которого в. заданном положении планшайбы совпадает с соответствующей образующей цевки. На станине также смонтированы включенные другпротив друга (оппозитно) одинаковые гидро (пневмо) цилиндры 7 и 8. На штоке одного из них находится упор 9, своими выступами контактирующий с рабочими поверхностями образующих пальца и цевки. На штоке второго смонти-рован двуплечпй поджимной рычаг 10. Устройство работает следующим образом i./civjuiciu,i i /iv/j, у u-i, - «- -pu jvjiii В исходном положении цилиндров 7 и 8 отведены от пальца и цевки. Шестерней 3 от двигателя через редуктор поворачивается планшайба 2. Производится гру6iim поворот- ее. После достижения зоны заданной позиции, двигатель грубого поворота отключается и подается команда на фиксацию. Начинают выдвигаться штоки цилиндров. При этом движении выступ упора 9 касается образующей фиксирующего пальца, а двуплечий рычаг, упираясь с другой стороны в цевку и палец, дотягивает цевку до положения, когда ее образующая также контактирует с уПором. Благодаря этому планшайба становится в фиксируемую позицию. При этом происходит незначительный IlUrl - il /iviiiij riv,.,fiis.4j-i.vj ..,t поворот планшайбы в пределах зазора в зяцепле ии шестерен, что не нагружает червячный редуктор. Следует отметить, что, несмотря на настройку предохранительного клапана гидрои пневмосистемы на высокое давление усилие в момент движения доворота невелико, так как нет сопротивления движению. Полное усилие развивается только после того, как ИГРОКИ упрутся в цевку и палец Но ввиду одинакового и оппозитного вклюения, и в этом случае усилия уравновешиаются, и изгиба цевок и пальца не происодит. Эта нагрузка также не передается а ось поворота. Такая конструкция поышает точность фиксирования. Этому таке спосо.бствует отсутствие зазора в рабоих элементах фиксирования - пальце и евке. Технико-экономическим эффектом изобретения является повышение точности поиционирования, что в свою очередь повышает производительность станка. Формула изобретения Устройство для фиксации позиционируеjмых рабочих органов станков, содержащее жестко закреплённые к подвижному элемен ту ориентирующие цевки, автономный привод предварительного перемещения в заданную позицию, пару одинаковых оппозитных гидроцилиндров, подключенных к общим для них магистралям соответственно нагнетания и слива, причем, на штоке одного из гидроцилиндров закреплен подводимый упор, отличающееся тем, что, с целью повышения точности позиционирования, оно снабжено фиксирующим пальцем, жестко закрепленным к неподвижной станине, при этом образующая пальца совпадает с соответствующей образующей цевки в заданном положении подвижного элемента, а на щтоке другого гидроцилиндра установ... - -L j -лен поджимной двуплечий качающийся рычаг, причем упомянутые упор и рычаг .,,r,ir-,.j-irnrrr4i i7i-ij r IjrM IlIQPl/r tlтактируют своими выступами с рабочими поверхностями образующих пальца и цевки. Источники информации, принятые во внимание при экспертизе 1Авторское свидетельство СССР № 376602, кл. F 16 В 1/04, 1973. 2Авторское свидетельство СССР № 738776, кл. В 23 В 29/32, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий производственный модуль автоматической линии | 1985 |
|
SU1456297A1 |
| Многопозиционный станок | 1987 |
|
SU1454652A1 |
| Агрегатный станок с автоматической сменой шпиндельных коробок | 1979 |
|
SU781016A1 |
| Устройство для фиксации подвижного узла станка | 1987 |
|
SU1505755A2 |
| Многооперационный станок с ЧПУ | 1985 |
|
SU1305000A1 |
| Многопозиционный стол | 1979 |
|
SU812531A1 |
| Револьверная головка | 1986 |
|
SU1342611A1 |
| Устройство для графаретной печати | 1989 |
|
SU1694419A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕМЕЩЕНИЯ И ОРИЕНТИРОВАННОЙ УСТАНОВКИ ЕМКОСТЕЙ И ЕМКОСТЬ ДЛЯ ПЕРЕМЕЩЕНИЯ И ХРАНЕНИЯ | 2008 |
|
RU2379175C2 |
| АВТОМАТИЧЕСКАЯ РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1993 |
|
RU2051012C1 |