Изобретение относится к машиностроению и может быть использовано для накопления и выдачи заготовок типа валов в зону обработки металлорежущих станков.
Цель изобретения - расширение функциональных возможностей и ynpouienne его конструкции.
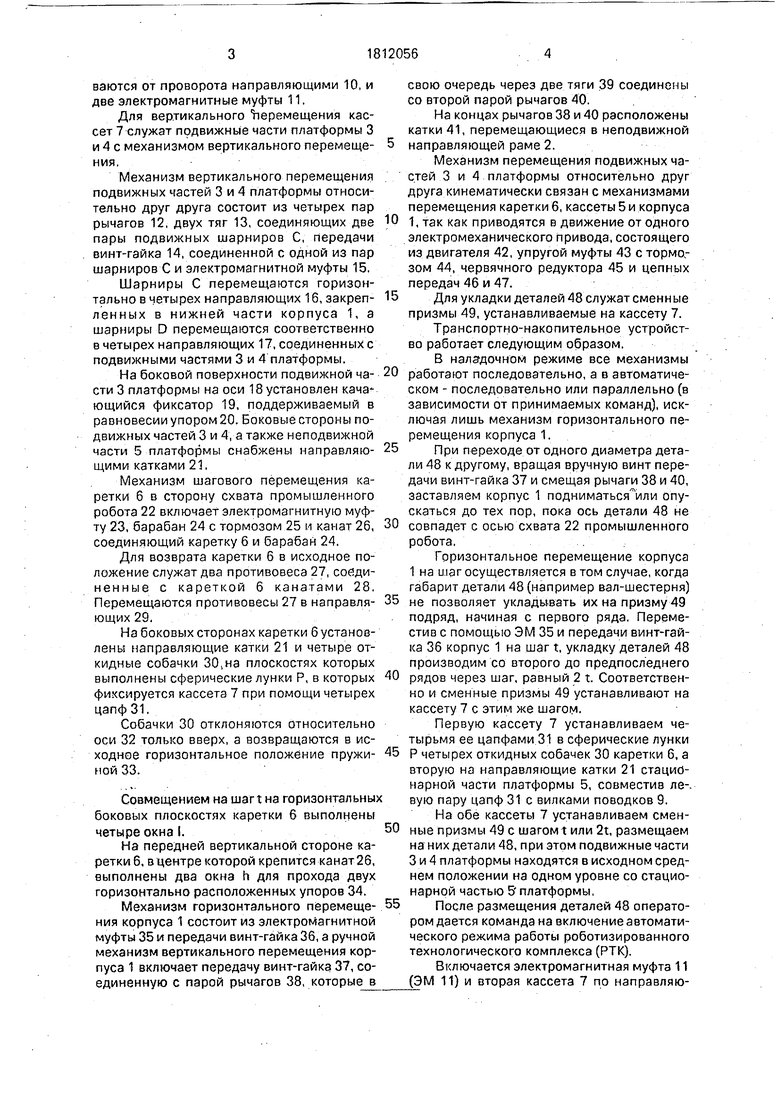
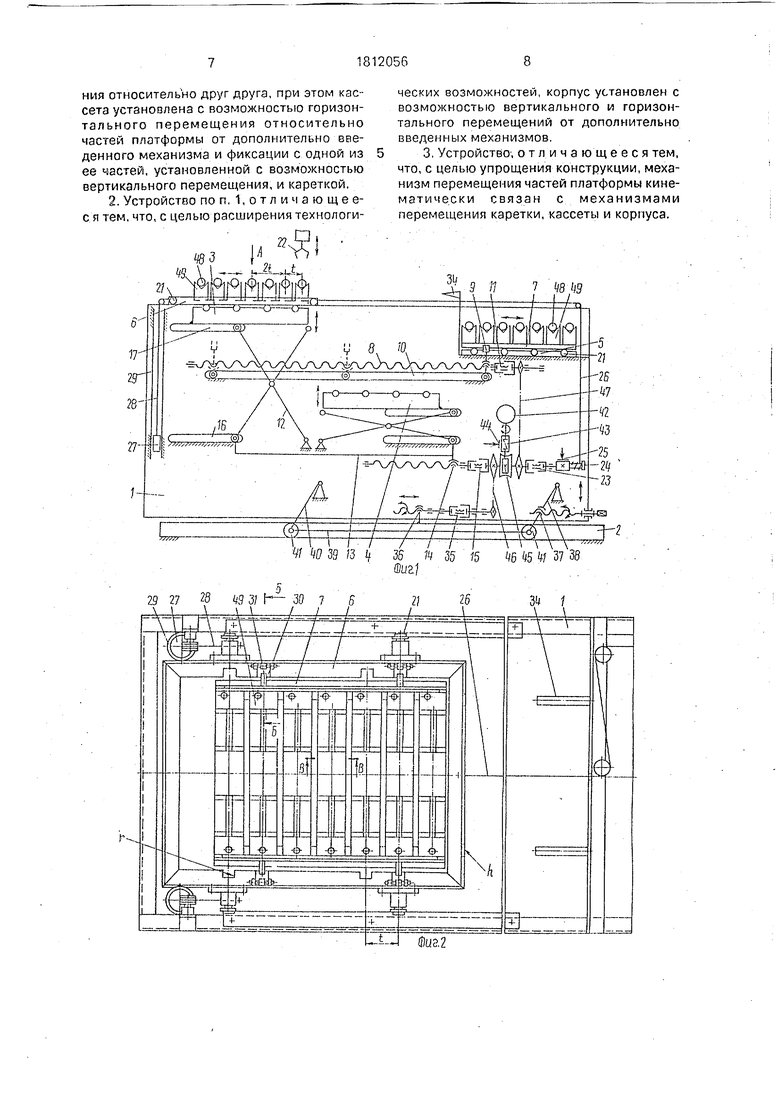
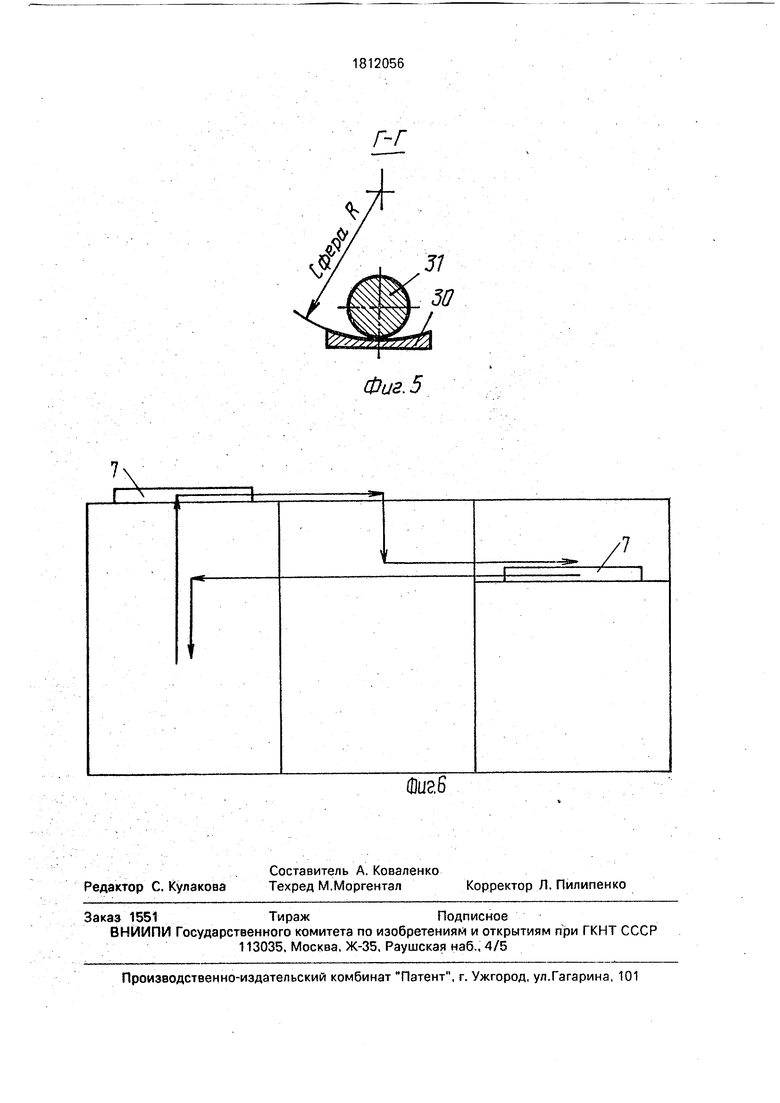
На фиг. 1 показана, кинематическая принципиальная схема устройства; на фиг, 2 - вид по стрелке А на фиг.: 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - сечение Г-Г на фиг. 3; на фиг. 6 - схема перемещения кассет.
Транспортно-накопительное устройство состоит из корпуса 1 и неподвижной направляющей рамы 2.
В корпусе 1 расположена платформа, состоящая из двух подвижных частей 3 и 4
и одной части 5, жестко связанной с корпусом 1.
: Устройство содержит каретку 6 с механизмом прямолинейных пошагового и возвратного перемещений, кассету 7 с механизмом горизонтального перемещения, а также механизм вертикального перемещения подвижных частей 3 и 4 платформы относительно друг друга, механизм горизонтального перемещения корпуса 1 и ручной механизм вертикального перемещения корпуса 1.
Кассета 7 установлена с возможностью горизонтального перемещения относительно частей платформы с помощью механизма, содержащего два винта 8, два горизонтально расположенных поводка 9, которые, перемещаясь по винтам 8, удержиСО
ел
га&
ваются от проворота направляющими 10, и две электромагнитные муфты 11.
Для вертикального Перемещения кассет 7 служат подвижные части платформы 3 и 4 с механизмом вертикального перемеще- ния.
Механизм вертикального перемещения подвижных частей 3 и 4 платформы относительно друг друга состоит из четырех пар рычагов 12, двух тяг 13, соединяющих две пары подвижных шарниров С, передачи винт-гайка 14, соединенной с одной из пар шарниров С и электромагнитной муфты 15.
Шарниры С перемещаются горизонтально в четырех направляющих 16, закреп- ленных в нижней части корпуса 1, а шарниры D перемещаются соответственно в четырех направляющих 17, соединенных с подвижными частями 3 и 4 платформы.
На боковой поверхности подвижной ча- сти 3 платформы на оси 18 установлен качающийся фиксатор 19, поддерживаемый в равновесии упором 20. Боковые стороны подвижных частей 3 и 4, а также неподвижной части 5 платформы снабжены направляю- щими катками 21.
Механизм шагового перемещения каретки 6 в сторону схвата промышленного робота 22 включает электромагнитную муфту 23, барабан 24 с тормозом 25 и канат 26, соединяющий каретку 6 и барабан 24.
Для возврата каретки 6 в исходное положение служат два противовеса 27, соединенные с кареткой 6 канатами 28. Перемещаются противовесы 27 в направля- ющих 29.
На боковых сторонах каретки б установлены направляющие катки 21 и четыре откидные собачки плоскостях которых выполнены сферические лунки Р, в которых фиксируется кассета 7 при помощи четырех цапф 31.
Собачки 30 отклоняются относительно оси 32 только вверх, а возвращаются в исходное горизонтальное положение пружи- ной 33.
Совмещением на шаг t на горизонтальны боковых плоскостях каретки 6 выполнены четыре окна I.
На передней вертикальной стороне каретки 6, в центре которой крепится канат26, выполнены два окна h для прохода двух горизонтально расположенных упоров 34.
Механизм горизонтального перемеще- ния корпуса 1 состоит из электромагнитной муфты 35 и передачи винт-гайка 36, а ручной механизм вертикального перемещения корпуса 1 включает передачу винт-гайка 37, соединенную с парой рычагов 38, которые в
свою очередь через две тяги 39 соединены со второй парой рычагов 40.
На концах рычагов 38 и 40 расположены катки 41, перемещающиеся в неподвижной направляющей раме 2.
Механизм перемещения подвижных частей 3 и 4 платформы относительно друг друга кинематически связан с механизмами перемещения каретки 6, кассеты 5 и корпуса 1, так как приводятся в движение от одного электромеханического привода, состоящего из двигателя 42, упругой муфты 43 с тормог зом 44, червячного редуктора 45 и цепных передач 46 и 47.
Для укладки деталей 48 служат сменные призмы 49, устанавливаемые на кассету 7.
Транспортно-накопительное устройство работает следующим образом.
В наладочном режиме все механизмы работают последовательно, а в автоматическом - последовательно или параллельно (в зависимости от принимаемых команд), исключая лишь механизм горизонтального перемещения корпуса 1.
При переходе от одного диаметра детали 48 к другому, вращая вручную винт передачи винт-гайка 37 и смещая рычаги 38 и 40, заставляем корпус 1 подниматься или опускаться до тех пор, пока ось детали 48 не совпадет с осью схвата 22 промышленного робота.
Горизонтальное перемещение корпуса 1 на шаг осуществляется в том случае, когда габарит детали 48 (например вал-шестерня) не позволяет укладывать их на призму 49 подряд, начиная с первого ряда. Переместив с помощью ЭМ 35 и передачи винт-гайка 36 корпус 1 на шаг t, укладку деталей 48 производим со второго до предпоследнего рядов через шаг, равный 2 t. Соответственно и сменные призмы 49 устанавливают на кассету 7 с этим же шагом.
Первую кассету 7 устанавливаем четырьмя ее цапфами 31 в сферические лунки Р четырех откидных собачек 30 каретки 6, а вторую на направляющие катки 21 стационарной части платформы 5, совместив ле-. вую пару цапф 31 с вилками поводков 9.
На обе кассеты 7 устанавливаем сменные призмы 49 с шагом или 2t, размещаем на них детали 48, при этом подвижные части 3 и 4 платформы находятся в исходном среднем положении на одном уровне со стационарной частью 5 платформы,
После размещения деталей 48 оператором дается команда на включение автоматического режима работы роботизированного технологического комплекса (РТК).
Включается электромагнитная муфта 11 (ЭМ 11) и вторая кассета 7 по направляющим каткам 21 подвижных 3 и 4 и стационарной части 5 платформы перемещается поводками 9 на подвижную часть платформы 3, в результате чего прокатный профиль кассеты 7 попадает в паз фиксатора 19, исключающего смещение кассеты 7 по направляющим каткам 21 при движении подвижной части 3 платформы вниз или вверх.
Работа двигателя 42, ЭМ 15 и ЭМ 11 синхронная: при отключении ЭМ 15 или ЭМ 11 отключается двигатель 42 и тормоз 44 останавливает муфту 43, а при включении ЭМ 15 или ЭМ 11 - а обратном порядке.
ЭМ 11 отключается, а ЭМ 15 включается. Подвижная часть 3 платформы опускается вниз, а другая подвижная часть 4 платформы поднимается вверх.
ЭМ 15 отключается и включается ЭМ 11, но уже после реверса двигателя 42 поводки 9 из крайнего левого положения перемещаются в среднее, соответствующее расположению левой пары цапф 31 и кассеты 7 при нахождении на подвижной части 4 платформы. ЭМ 11 отключается.
Пошаговая подача первой кассеты 7 на шаг t или 2 t осуществляется ЭМ 23. Тормоз 25 отпускает барабан 24 и канат 26, наматываясь, перемещает каретку 6 вправо. При . отключении ЭМ 23 тормоз 25 останавливает барабан 24.
После обработки последней детали 48 на последнем ряду призм 49 каретка 6 перемещается в крайнее правое положение.
Как только кассета 7 окажется над подвижной частью 4 платформы, два упора 34, пройдя через.окна h каретки 6, войдут в контакт с кассетой 7 и остановят ее.
При продолжающемся перемещении каретки 6 в крайнее правое положение цапфы 31, соскользнув с откидных собачек 30 и пройдя расстояние, равное шагу t, опустятся в окна I каретки 6,
Кассета 7 окажется на направляющих катках 21 подвижной части 4 платформы. ЭМ 23 отключается.
Включается ЭМ 15. Подвижные части 3 и 4 платформы занимают исходное среднее положение. При этом левая пара цапф 31 первой кассеты 7, находящейся на подвижной части 4 платформы, попадает в вильчатый створ поводков 9. ЭМ 15 отключается.
Параллельно включаются ЭМ 23 и ЭМ
11.
Барабан 24 начинает разматывать канат 26 и каретка 6 под действием тяжести противовесов 27, опускающихся -в. направляющих 29, перемещается на направляющих катках 21 в исходное левое положение, после чего ЭМ 23 отключается. .
ЭМ 11 отключится после того, как поводки 9 переместят первую кассету 7 в исходное правое- положение (на стационарную часть 5 платформы).
Включается ЭМ 15 и подвижная часть 3
платформы со второй кассетой 7 поднимается вверх. При атом четыре цапфы 31.отклоняют откидные собачки 30 тоже вверх, которые проворачиваются относительно оси 32 до тех пор, пока собачки 30 находятся
0 в контакте с цапфами 31. Как только контакт прерывается,откидные собачки 30 под действием пружин 33 возвращаются в исходное горизонтальное положение,
5 В крайних положениях подвижных частей 3 и 4 платформы происходит реверс двигателя 42 и обе платформы начинают перемещаться в исходное среднее положение, но при этом вторая кассета 7 зависает
0 на цапфах 31, которые попадают в сферические лунки Р откидных собачек 30.
После отключения ЭМ 15 начинается подача деталей 48 к станку, т.е. автоматический цикл повторяется,
5 При выходе первой кассеты 7 на стационарную часть 5 платформы включается звуковая и световая сигнализация.
После проведения разгрузочно-загру- зочных работ на первой кассете 7 оператор
0 дает команду на включение ЭМ 11 и загруженная первая кассета 7 поводками 9 перемещается на подвижную часть 3 платформы. ЭМ 11 отключается. Включается ЭМ 15.
5 Подвижная часть 3 платформы опускается с первой кассеты 7 вниз, а пустая подвижная часть 4 платформы поднимается вверх.
Если не поступит подтверждающего
0 сигнала о том, что подвижная часть 4 платформы находится вверху для приема второй кассеты 7, то после обработки последней . детали 48 в последнем ряду призм 49 автоматический цикл работы РТК прерывается.
5 Все промежуточные и конечные пере- меш.ения исполнительных органов транс- портно-накопительного устройства контролируются конечными выключателями.
0 Формула изобретения
1. Транспортно-накопитёльное устройство, содержащее корпус, платформу с направляющими, каретку с механизмом шагового перемещения, кассету и привод,
5 отличающееся тем, что, с целью расширения функциональных возможностей, платформа выполнена составной из трех частей, одна из которых жестко связана с корпусом, а две другие установлены с возможностью вертикального перемещения относительно друг друга, при этом кассета установлена с возможностью горизонтального перемещения относительно частей платформы от дополнительно введенного механизма и фиксации с одной из ее частей, установленной с возможностью вертикального перемещения, и кареткой,
2. Устройство по п. 1,отличающееся тем. что, с цел ыо расширения технологических возможностей, корпус установлен с возможностью вертикального и горизонтального перемещений от дополнительно введенных механизмов.
3. Устройство, о т л и ч а ю щ е е с я тем, что, с целью упрощения конструкции, механизм перемещения частей платформы кинематически связан с механизмами перемещения каретки, кассеты и корпуса.

| название | год | авторы | номер документа |
|---|---|---|---|
| Пишущая машина | 1934 |
|
SU43012A1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОЙ СКОРОСТНОЙ НАМОТКИ НА КАТУШКИ НИТЕОБРАЗНЫХ МАТЕРИАЛОВ | 1972 |
|
SU360128A1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК ДЛЯ ИНВАЛИДОВ | 1997 |
|
RU2116238C1 |
| Загрузочно-разгрузочное устройство | 1988 |
|
SU1698159A1 |
| Автомат для сборки комплектадЕТАлЕй | 1979 |
|
SU841895A1 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| Магазин-накопитель | 1986 |
|
SU1404262A1 |
| Способ подачи полосового материала к прессу и устройство для его осуществления | 1985 |
|
SU1279719A1 |
| УСТАНОВКА ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 1991 |
|
RU2017641C1 |
| КАНТОВАТЕЛЬ | 1998 |
|
RU2129087C1 |
Использование: для накопления и выдачи заготовок типа валов в зону обработки металлорежущих станков. Сущность изобретения: в корпусе устройства выполнены три платформы: две подвижные и одна стационарная, которые помощью механизма их перемещения, состоящего из четырех пар рычагов, двух тяг и передачи винт-гайка, перемещают платформу с деталями в сторону захвата промышленного робота. На платформы устанавливаются кассеты с деталями, приводимые в движение с помощью двух электромуфт, винтов и горизон- тально расположенных поводков. Последующее пошаговое перемещение каретки осуществляется с помощью электромуфты, барабана с тормозом и каната, соединяющего каретку и барабан. При этом все механизмы, кроме ручного механизма вертикального перемещения корпуса, работают от одного привода, состоящего из двигателя, упругой муфты с тормозом, червячного редуктора и цепных передач, 2 з.п. ф-лы, 6 ил.
U-i-J фи г. 2
1
Фиг. 5
| Магазин-накопитель | 1986 |
|
SU1404262A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
