Изобретение относится к машино- и приборостроению и может быть использовано для комбинированной обработки (ППД + правка) цилиндрических и ступенчатых валов.
Цель изобретения - уменьшение себестоимости обработки и упрощение конструкции.
Это достигается тем, что ППД и одновременно правку осуществляют с перемен- ным по окружности вала усилием. Деформирующим элементом (ДЭ) воздействуют на вогнутую поверхность вала с большим усилием, а на выпуклую - с меньшим. На ДЭ воздействуют через пружинящий элемент эксцентриком, который вращается синхронно с обрабатываемой деталью.
Указанные цели достигаются также тем, что устройство включает накатную головку с ДЭ и нагружающим элементом (НЭ), расположённую с возможностью осевого перемещения в отверстии стойки. НЭ выполнен пружинящим. Эксцентрик, взаимодействующий с торцом накатной головки, закреплен на оправке, которая смонтирована с возможностью вращения в стойке. В отверстии этой оправки размещен установленный в подшипниках с возможностью вращения вал, передающий вращение на упомянутую оправку с возможностью одновременного перемещения оправки вдоль оси вала. Устройство снабжено передачей с постоянным передаточным числом, равным единице. Это может быть цепная, зубчатая или зубоременная передача. Одно из колес передачи смонтировано на упомянутом валу с возможностью передачи на него вращения.
Эксцентрик может быть закреплен на оправке с возможностью регулировки его углового положения.
Это повышает удобство эксплуатации устройства.
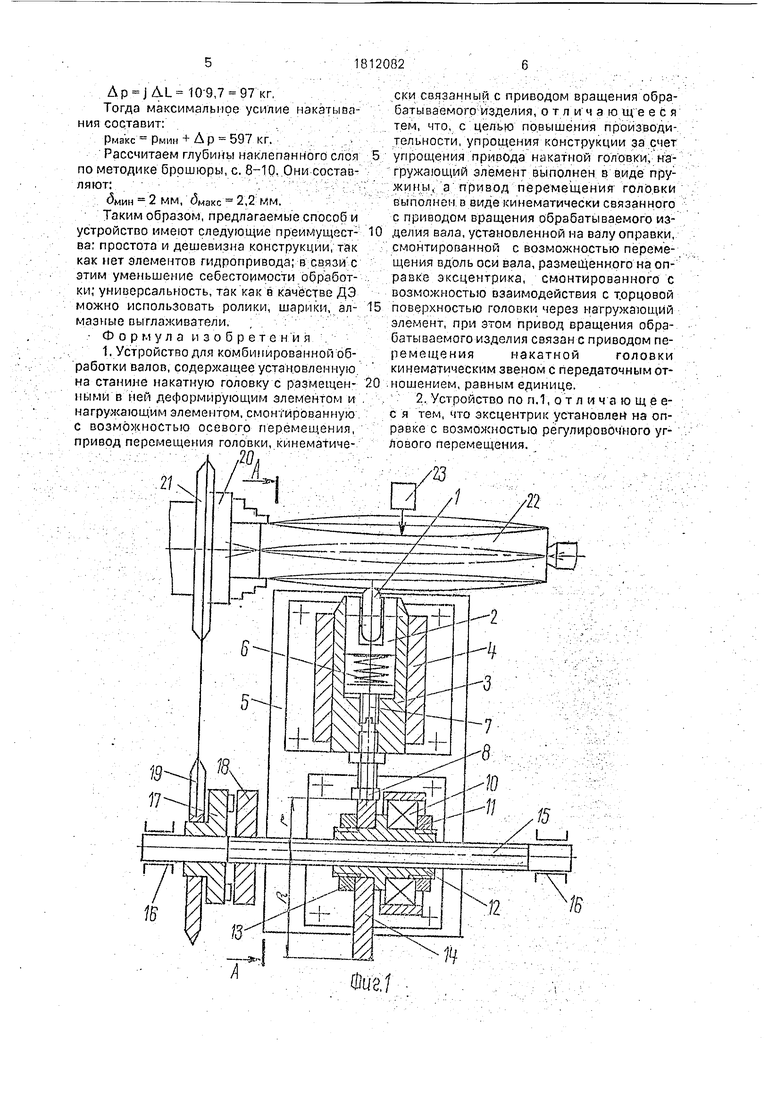
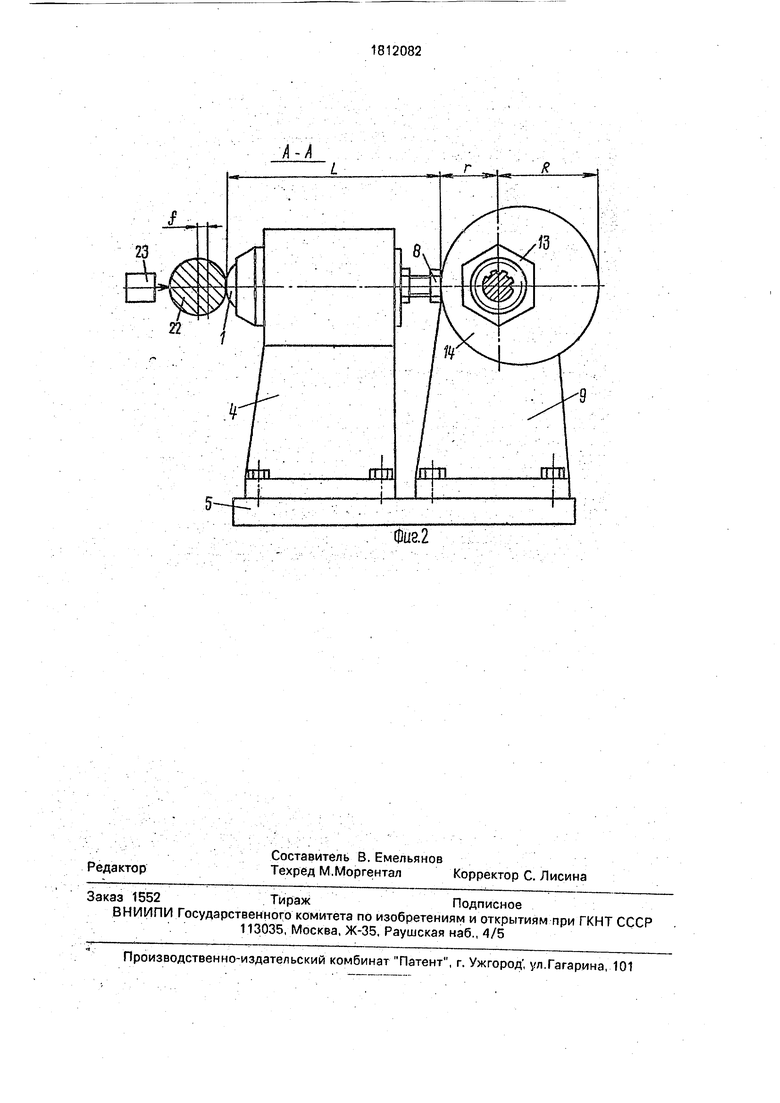
На фиг. 1 дана принципиальная конструктивная схема устройства (разрез горизонтальной плоскостью по оси обрабатываемой детали и эксцентрика); на фиг.2 - разрез А-А на фиг. 1 (повернуто).
ДЭ выполнен в виде ролика 1, установленного в вилке 2 с возможностью враще-1 ния. Вилка установлена с возможностью осевого перемещения в отверстие пмнели 3,
ел
с
00
.-
КЗ
о со
N5
которая с возможностью осевого перемещения вложена в отверстие стойки 4, закреплённой на плите 5. ИЭ выполнен в виде пружины 6. В резьбовое отверстие пинели 3 ввернут винт 7, который служит для регулй- ровкиусилия пружины 6. В это же отверстие ввернут болт 8, служащий для регулировки .длины накатной головки 1.
На плите 5 закреплена стойка 9, в отверстие которой запрессован подшипник 10, В отверстие подшипника установлена и .закреплена гайкой 11 оправка 12. На оправке 12 гайкой 13 закреплен эксцентрик 14. Рабочая поверхность эксцентрика 14 выполнена симметричной относительно диаметральной плоскости (фиг.2), в которой лежат его минимальный г и максимальный R радиусы...
В шлицезом отверстии оправки 12 размещен шлицевый вал 15, установленный в подшипнике 16. Последние установлены в стойках, размещенных на станине станка (на фиг. не показано). На левом конце вала установлена электромагнитная муфта, со- . стоящая из двух полумуфт 17 и 18 с торцо- выми зубьями. Отверстие, у полумуфты 18 выполнено шлицевым, а у полумуфты 17 - цилиндрическим. На шейке полумуфты 17 закреплена шестерня; 19.-(или звездочка).
Устройство устанавливают на станке то- карно.го типа. При этом плиту 5 закрепляют на поперечном суппорте станка. К патрону 20 станка прикреплена шестерня 21 (или звездочка), которая находится в зацеплении с шестерней 19, Передаточное число пере- дачи равно единице. .- . .
Обрабатываемый вал 22 устанавливают в патрон 20 и поджимают задним центром, С помощью индикаторной стойки определяют плоскость изгиба вала и устанавливают вал 22 так, чтобы плоскость его изгиба была горизонтальной, а выпуклая поверхность вала 22 была обращена к ролику 1 (фиг.1). Ослабляют гайку 13, разворачивают Э 14 так, чтобы его минимальный радиус г совпал с горизонтальной плоскостью и был обра- щен к валу 22 (фиг.2). Затягивают гайку 13.
Выворачивают болт 8 до тех пор, пока его головка не упрется в Э 14, ролик 1 - в вал 22, а пружина 6 сожмется на 1-2 мм. : Включают вращение вала 22. Через зубчатую (или цепную) передачу 21-19 вращение передается на полумуфту 17, от нее через торцовые зубья - на полумуфту 18 и далее-на вал 15, оправку 12 и Э 14. Так как передаточное число зубчатой (или цепной) передачи равно единице, Э 14 будет вращаться синхронно с валом 22. При этом, когда вал 22 обращен к ролику 1 выпуклостью (фиг.1). Э 14 обращен к нему минимальным, радиусом (фиг.2), и пружина 6 развивает минимальное усилие на ролике. Когда вал 22 повернется к ролику вогнутой поверхностью, Э 14 повернётся к нему максимальным радиусом, пружина б сожмется и разовьет максимальное усилие на ролике 1. Величина сжатия пружины AL при этом составляет (фиг.2): . :,
AL-R-r f,. (1) где f - величина прогиба вала 22.
В связи с этим на вогнутой поверхности вала 22 пластическая деформация распространяется: на большую глубину, чем на выпуклой. Одновременно с накатыванием будет протекать процесс правки вала. :..
Изменяющийся прогиб вала непрерывно контролируется датчиком 23, установленным на станине станка. При достижении требуемой величины прогиба датчик 23 вырабатывает сигнал, по которйм у п6лумуфты 17 и 1.8 расходятся. их торцовые з убья разьединяются, Поэтому вращение полумуфтьг 16, а следовательно, вала 15 и Э 14 прекра- :щаётся , Дальнейшее накатывание осущеет- вля.ется с постоянным усилием на ролике 1. : За прогибом вала 22 можно следить визуально. Для этого вместо датчи ка 22 следует установить индикатор. При достижении требуемого прогиба - разъединить полумуфты 17 и 18 вручную.. -..;.- / :. ,. Вместо ролика 1 в качестве ДЭ может быть использован шарик или алмазный выглаживатель. ../ .;..;:.; /. .. .-
Конструкция описанного устройства значительно проще и дешевле чем в прототипе, т.к. в ней нет сложных и дорогих элементов гидропривода (гидронасосов, гидроцилиндр и т.п.). .;.: . ; :
Т.к. применяемое устройство проще по конструкции и дешевле, чем в прототипе, уменьшается себестоимость обработки.
Пример, Требуется обработать вал с исходным прогибом f - 0,3 мм. Диаметр вала Ьз . 60 мм, материал - сталь 45.
Принимаем минимальное усилие ППД Рмин - 500 кг, диаметр ролика Da 60 мм, радиус его рабочего профиля RI б мм, г 40 мм, R 50 мм.
По формуле (1) рассчитаем величину сжатия пружины All:
AL 50-40-0,3 9,7 мм
Принимаем жесткость пружины j 10 кг/мм. Известно, что:
i -АР (2)
где Д-р - приращение силы пружины; Ду - ее деформация, Ay A L, Приращение силы на пружине из уравнения равно:
Ap jAL 10-9,7 97 кг,
Тогда максимальное усилие накатыва- ния составит:. :
Рма кс Рмпн + Ар 597 кг. . ; ..
Рассчитаем глубины наклепанного слоя по методике брошюры, с. 8-10,.Они составляют: : : ;. ; . .. ..(
(Змин 2 ММ, бмакс 2,2 Мм.
Таким образом, предлагаемые способ и устройство имеют следующие преимуа1ест- ва: простота и дешевизна конструкции/так как нет элементов гидропривода; в связи с этим уменьшение себестоимости обработки; универсальность, так как в качестве ДЭ можно использовать ролики, шарики, алмазные выглаживзтели, ; : ; Формулаизобретени я .
1. Устройство для комбипированной:об- работки валов, содержащее установленную. на станиле накатную головку с размещенными в ней деформирующим элементом и нагружающим элементом, смонтированную. с возможностью осевого перемещения, привод перемещения головки, кинематичехч /Zfl .21
ски связанный с приводом вращения обра- батываемого::изделия, о т л и ч а ю щ е е с я тем, что, с целью повышения производительности, упрощения конструкции за .счет
упрощения.привода накатной головки, н;агружающий элемент.выполнен, в виде пру1
жины, а привод перемещения головки
выполнен в виде кинематически связанного
с приводом вращения обрабатываемого изделия вала, установленной на валу оправки, смонтированной с возможностью перемещения вдоль оси вала, размещенного на оправке эксцентрика, смонтированного с возможностью взаимодействия с торцовой
поверхностью головки через нагружающий элемент, при этом привод вращения обрабатываемого изделия связан с приводом пе- ремещения накатной головки кинематическим звеном с передаточным от.ношением, равным единице.
2, Устройство по п.1, от л и ч а ю щ е е- с я тем, что эксцентрик установлен на оправке с возможностью регулировочного углового перемещения.. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для комбинированной обработки валов | 1991 |
|
SU1812081A1 |
| Накатной ролик | 1990 |
|
SU1816670A1 |
| Способ комбинированной обработки цилиндрических валов | 1990 |
|
SU1771933A1 |
| Накатной ролик | 1990 |
|
SU1816671A1 |
| Деформирующий инструмент для накатывания с одновременной правкой деталей | 1989 |
|
SU1682141A1 |
| Накатной ролик | 1990 |
|
SU1816669A1 |
| Накатная головка | 1990 |
|
SU1816668A1 |
| Головка для правки с одновременным накатыванием деталей типа вала | 1989 |
|
SU1682148A1 |
| ПЛАНЕТАРНАЯ ГОЛОВКА | 1999 |
|
RU2162786C2 |
| Способ правки цилиндрических деталей | 2018 |
|
RU2686963C1 |
Использование: обработка металлов давлением, в частности комбинированная обработка (ППД + правка) обработки валов.. Сущность изобретения: устройство включает накатную головку с деформирующим элементом (ДЭ) и пружиной. С торцом накатной головки контактирует эксцентрик (Э), который вращается синхронно с обрабатываемой деталью. При контакте ДЭ с вогнутой поверхностью вала Э сжимает пружину, при , этом она создаёт максимальное усилие на ДЭ. При контакте ДЭ с выпуклой поверхностью вала Э высвобождает пружину и она создает минимальное усилие на ДЭ. 1 з.п.ф- лы, 2 ил.
| Патент США № 3823588, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
