(5) ПРУЖИННЫЙ МЕХАНИЗМ
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АДАПТИВНОЙ КОМПЕНСАЦИИ ПРОМЫШЛЕННОГО РОБОТА | 2022 |
|
RU2785422C1 |
| Устройство вертикального перемещения | 1977 |
|
SU643323A2 |
| Устройство для уравновешивания механизмов подъема | 1982 |
|
SU1022940A1 |
| Механизм уравновешивания манипулятора | 1982 |
|
SU1049245A1 |
| Устройство вертикального перемещения | 1980 |
|
SU1044591A1 |
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| Механизм уравновешивания манипулятора | 1987 |
|
SU1437215A1 |
| Манипулятор | 1987 |
|
SU1426782A1 |
| Рука манипулятора | 1983 |
|
SU1133085A1 |
| Стабилизирующее сцепное устройство прицепной асимметричной машины на машинно-тракторном агрегате | 2023 |
|
RU2807446C1 |
I
Изобретение относится к машиностроению и может быть использовано, например для уравновешивания устройства вертикального перемещения, в промышленных роботах и манипуляторах.
Известен уравновешивающий механизм с противовесами для устройства вертикального перемещения 1
Недостаток такого механизма - значительная инерционность , ухудшающая его динамические характеристики.
Наиболее близким к изобретению является пружинный механизм, преимущественно для уравновешивания устройств вертикального перемещения.содержащий установленные один в другом неподвижное и подвижное звенья, закрепленную на одном из них одним концом пружину, закрепленный на этом же звене поворотный блок, гибкий элемент, охватывающий блок и соединенный со свободным концом пружиныi и опорный элемент.
Поворотный блок в известном механизме Выполнен в виде частей, одна из которых цилиндрическая, а другая - кулачковая, выполненная, например, по спирали Архимеда. Гибкий элемент также выполнен из двух частей , каждая из которых закреплена соответственно на цилиндрической и кулачковой частях блока. Кулачковая часть блока является как бы опорным
10 элементом 2.
Недостатком известного устройства является сложность конструкции, а кулачковая часть барабана, выполнейная по спирали Архимеда, сложна тех15нологически .
Цель изобретения - упрощение конструкции.
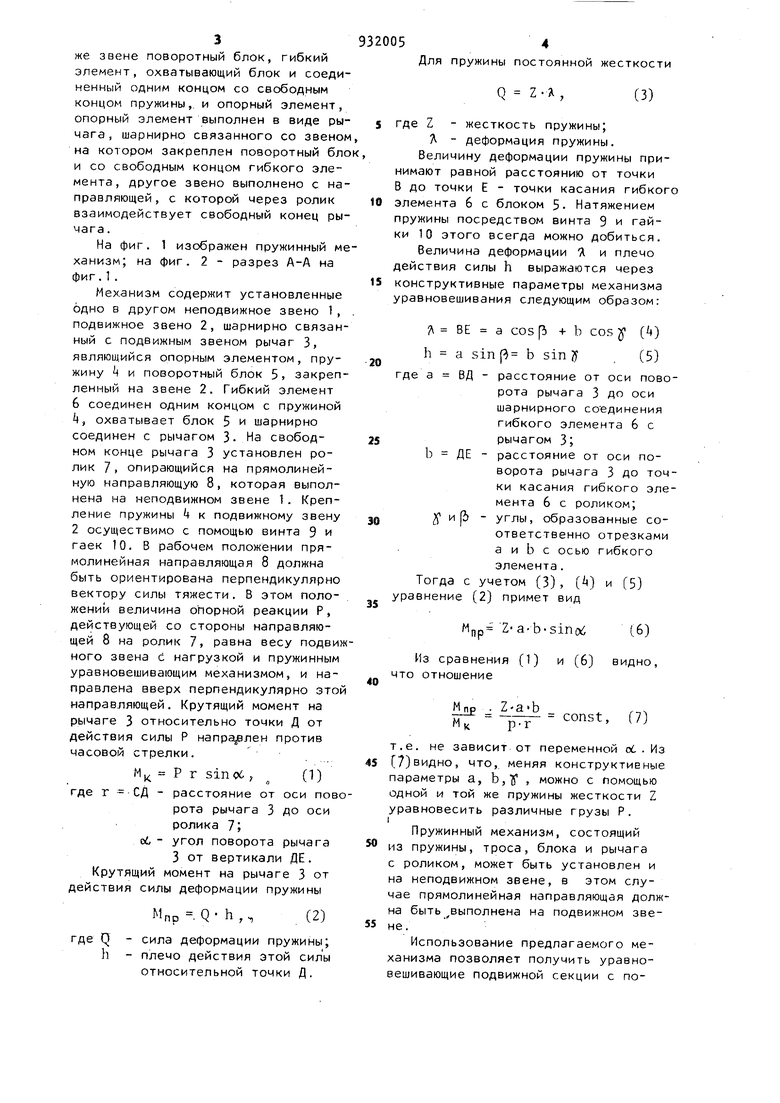
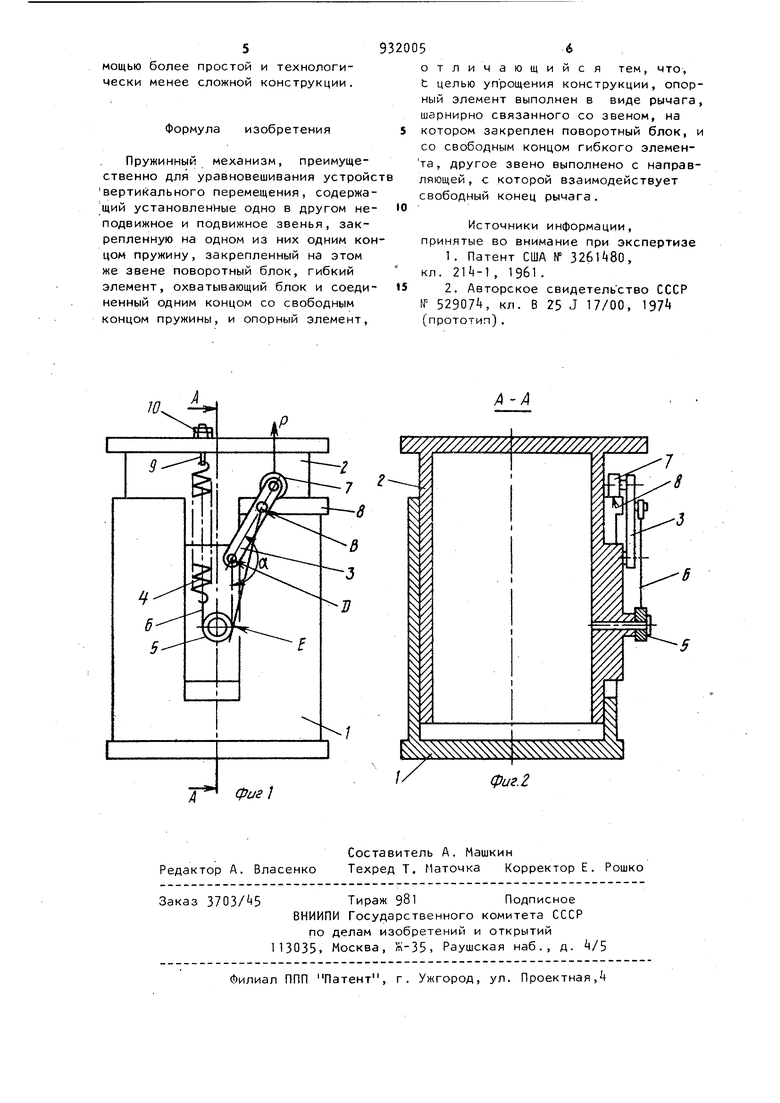
Указанная цель достигается за счет того, что в пружинном механизме,
Ж содержащем установленные одно в дру-, гом неподвижное и подвижное звенья, закрепленную на одном из них одним концом пружину, закрепленный на этом же звене поворотный блок, гибкий элемент, охватывающий блок и соеди ненный одним концом со свободным концом пружины,, и опорный элемент, опорный элемент выполнен в виде ры чага, шарнирно связанного со звено на котором закреплен поворотный бл и со свободным концом гибкого элемента, другое звено выполнено с на правляющей , с которой через ролик взаимодействует свободный конец ры чага. На фиг. 1 изображен пружинный м ханизм; на фиг. 2 - разрез А-А на фиг.1. Механизм содержит установленные одно в другом неподвижное звено 1, подвижное звено 2, шарнирно связан ный с подвижным звеном рычаг 3, являющийся опорным элементом, пружину 4 и поворотный блок 5, закреп ленный на звене 2. Гибкий элемент 6 соединен одним концом с пружиной , охватывает блок 5 и шарнирно соединен с рычагом 3- На свободном конце рычага 3 установлен ролик 7, опирающийся на прямолинейную направляющую 8, которая выполнена на неподвижном звене 1. Крепление пружины 4 к подвижному звену 2 осуществимо с помощью винта 9 и гаек 10. В рабочем положении прямолинейная направляющая 8 должна быть ориентирована перпендикулярно вектору силы тяжести. В этом положений величина опорной реакции Р, действующей со стороны направляющей 8 на ролик 7, равна весу подви ного звена t нагрузкой и пружинным уравновешивающим механизмом, и направлена вверх перпендикулярно это направляющей. Крутящий момент на рычаге 3 относительно точки Д от действия силы Р направлен против часовой стрелки. Р г sin06, (1) где г СД - расстояние от оси пов рота рычага 3 до оси ролика 7; об - угол поворота рычага 3 от вертикали ДЕ. Крутящий момент на рычаге 3 от действия силы деформации пружины MnD Q- h -сила деформации пружины; -плечо действия этой силы относительной точки Д. Для пружины постоянной жесткости Q Z-Я, где Z - жесткость пружины; Л - деформация пружины. Величину деформации пружины принимают равной расстоянию от точки В до точки Е - точки касания гибкого элемента 6 с блоком 5- Натяжением пружины посредством винта 9 и гайки 10 этого всегда можно добиться. Величина деформации Я и плечо действия силы h выражаются через конструктивные параметры механизма уравновешивания следующим образом: 5 БЕ а cos 5 + b cos (k} h а sin b sin у , (5) где a ВД - расстояние от оси поворота рычага 3 до оси шарнирного соединения гибкого элемента 6 с рычагом 3; b ДЕ - расстояние от оси поворота рычага 3 до точки касания гибкого элемента 6 с роликом; У и |Ь - углы, образованные соответственно отрезками а и b с осью гибкого элемента. Тогда с учетом (3) , () и 5) уравнение (2) примет вид МПР Z-a-b-sinoti (6) Из сравнения (1) и (6) видно, что отношение Z-a-b . .Т-. const, f7) т.е. не зависит от переменной об . Из 7)видно, что, меняя конструктивные параметры а, Ь,У , можно с помощью одной и той же пружины жесткости Z уравновесить различные грузы Р. I Пружинный механизм, состоящий из пружины, троса, блока и рычага с роликом, может быть установлен и на неподвижном звене, в этом случае прямолинейная направляющая должна быть выполнена на подвижном звене . Использование предлагаемого механизма позволяет получить уравновешивающие подвижной секции с по
