Изобретение относится к гидроприводу и может быть использовано в гидравлических системах, к которым предъявляются требования повышенной надежности, высоких показателей регулирования и стабильности выходных параметров.
Цель изобретения - улучшение переходных характеристик процесса перемены структуры за счет обеспечения плавности отключения одного из каналов в установившихся режимах.
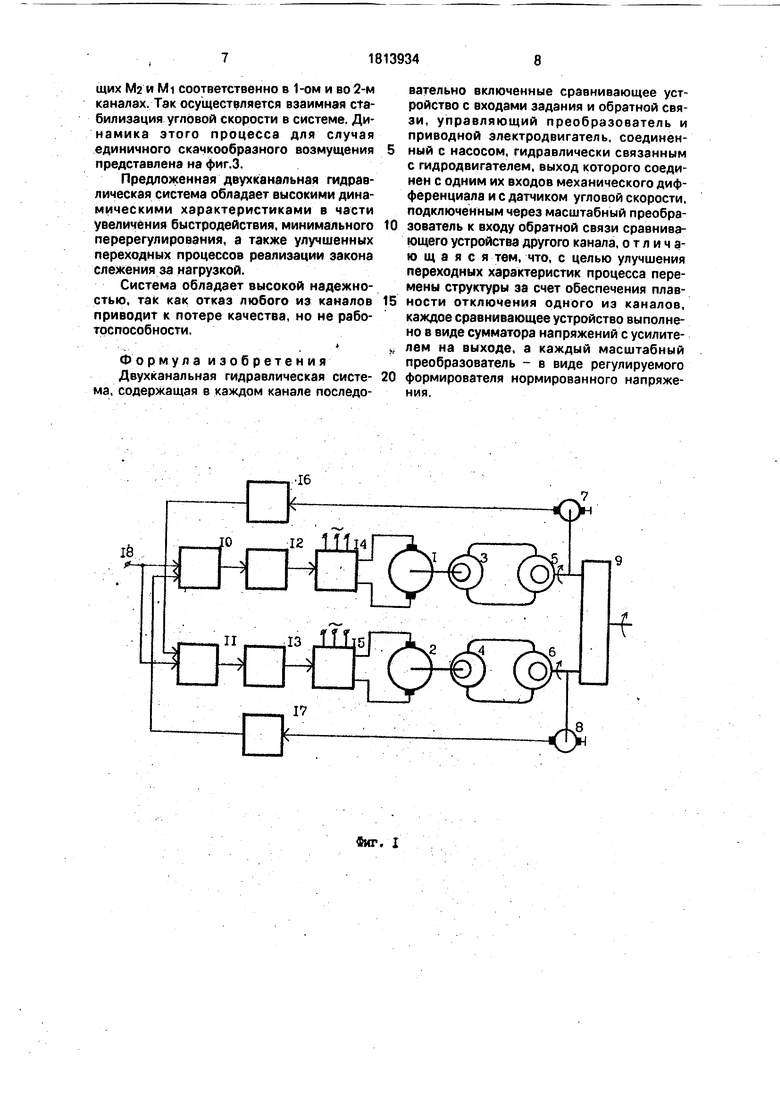
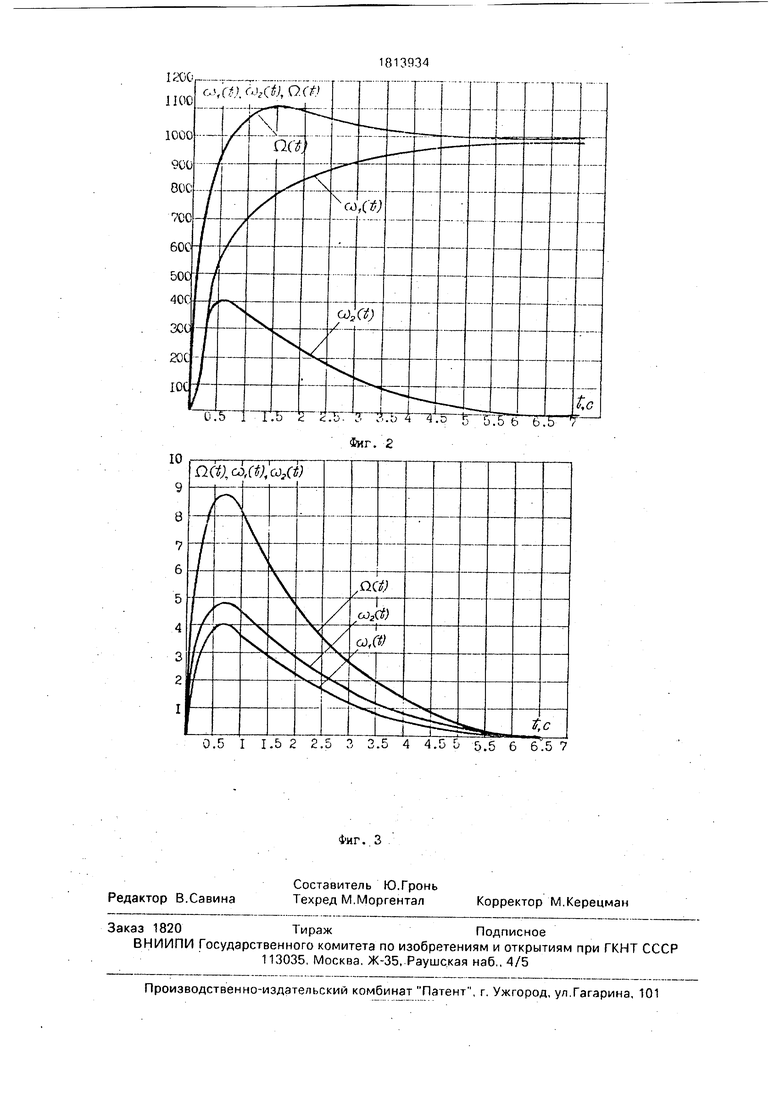
На фиг. 1 представлена схема двухка- нальной гидравлической системы; на фиг,2 - переходные процессы при управляющем воздействии; на фиг.З - переходные процессы при координатном возмущении.
Двухканальная гидравлическая система содержит первый и второй 1 и 2 электроприводы, соединенные с первым и вторым 3 и 4 насосами, гидравлически связанными с первым и вторым 5 и 6 гидродвигателями, выходы которых соединены соответственно с первым и вторым 7 и 8 датчиками угловой скорости и первым и вторым входами механического дифференциала 9, первый и второй 10 и 11 сумматоры, первый и второй 12 и 13 усилители, первый и второй 14 и 15 управляющие преобразователи, причем выходы первого и второго 7 и 8 датчиков угловой скорости подключены к входам первого и второго 16 и 17 регулируемых формирователей нормированного напряжения, выходы которых подключены соответственно к вторым входам второго 11 и первого 10 сумматоров. Первые входы первого 10 и второго 11 сумматоров объединения и являются входом устройства 18, а выходом - выходной вал механического дифференциала 9,
Для описания работы двухканальной гидравлической системы необходимо составить уравнения, характеризующие статические и динамические режимы при управляющих и возмущающих воздействиях.
Первый усилитель 12, первый управляющий преобразователь 14, первый электропривод 1, первый насос 3 и первый гидродвигательБ образуют цепь прямого
+J
Ё
00
СА) О OJ
-fcb
преобразования 1-го канала, уравнение которого имеет вид
Wi(S)ftJi KiUyi-KMiMi,
0)
где Uyi, w и Mi - сигнал управления, угловая скорость и момент нагрузки;
Ki - результирующий коэффициент передачи по управляющему воздействию;
КМ1 коэффициент передачи по моменту нагрузки;
WiS aniSn + а(п-1)1 +...+1 - полином, определяющий динамические характеристики 1-го канала.
Второй усилитель 13, второй управляющий преобразователь 15, второй электропривод 2, второй насос 4 и второй гидродвигатель 6 образуют цепь прямого преобразователя 2-го канала, уравнение которого имеет вид
W2(S) (01 К211у2-Км2М2,
(2)
где Uy2, (О2 и М2 - сигнал управления, угловая скорость и момент нагрузки;
К2 - результирующий коэффициент передачи по управляющему воздействию;
Км2 - коэффициент передачи по моменту нагрузки;
W2(S) аП25п + a(n-i) +...+ 1 - полином, Определяющий динамические характеристики 2-го канала
Уравнение первого сумматора
Uy1 Ј ,
(3)
На оснЪвании (1}-(4) можно составить систему 2-х координатно-связэнных уравнений
Wi(S)wi + Ki/32ftJ2 Kie KMiMi (5) K2/3i + W2 ( S )ffl2 K2 R - KM2 M2 (6) Решение (5)-(6) относительно общего
сигнала задания е и регулируемых координатам ((Oi будут следующие параметрически связанные уравнения;
(Wi(S)W2(S)-Ki K2 fr fa) - Ki(W2(S)- К2# )e-KMiW2(S)Mi + KiKM2#2M2, (7) (WitSJW SJ-KiKs i fa ) Ш2 K2(Wi(S)
- )e-KM2Wi(S)M2 + K2KMi/3iMi, (8)
уравнения (7)-(8) в статических режимах приводятся к следующему виду:
(1 - KiK20i#)ui Ki(1 - К2Д )е- KMiMi + + KiKM2 zM2l(9) (1 KlK Д«) (01 К2(1 - К1# ) е - Км2М2 + + K2KMi/SiMi. (10)
При этом угловая скорость ш на выходе механического дифференциала определяется уравнением
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство компенсации помех | 1989 |
|
SU1734216A1 |
| Устройство адаптивного управления объемным гидравлическим приводом | 1989 |
|
SU1686407A1 |
| Двухканальный электроакустический тракт с общей шиной | 1990 |
|
SU1746906A3 |
| Двухканальная гидравлическая система | 1989 |
|
SU1665128A1 |
| Измеритель S - параметров четырехполюсника СВЧ | 1989 |
|
SU1682941A1 |
| Способ управления двухбарабанным ленточным конвейером | 1984 |
|
SU1286474A1 |
| Адаптивное устройство подавления помех | 1990 |
|
SU1800620A1 |
| Способ управления многоканальным рулевым агрегатом с межканальной синхронизацией | 1990 |
|
SU1835370A1 |
| Устройство компенсации помех | 1985 |
|
SU1319286A1 |
| Гироскопическое устройство для определения курса | 1989 |
|
SU1783302A1 |
Сущность изобретения: в каждом канале последовательно включены сравнивающее устройство с входами задания и обратный клапан, управляющий преобразо ватель и приводной электродвигатель, соединенный с насосом. Насос гидравлически связан с гидродвигателем, выход которого соединен с одним из входов механического дифференциала и с датчиком угловой скорости, подлюченным через масштабный преобразователь к входу обратной связи сравнивающего устройства другого канала. Каждое устройство выполнено в виде Сумматора напряжений с усилителем на выходе, каждый преобразователь - в виде регулируемого формирователя нормированного напряжения, 3 ил,
где Ј - сигнал задания на входе системы;
& - Кй)зКр2 - коэффициент передачи рефлексивной связи 2-го канала, включающий коэффициенты второго датчика угловой скорости 8 и второго регулируемого формирователя нормированного напряжения 17,
Уравнение второго сумматора
Uy2 К ,
(4)
где /3i- KojiKpi - коэффициент передачи рефлексивной связи 1-го канала, включающий коэффициенты первого датчика угловой скорости 7 и первого регулируемого формирователя напряжения 16.
Физический смысл понятия связи заключается в том, что на второй вход сумматора первого канала подается сигнал, пропорциональный регулируемой координате второго канала, а на второй вход сумматора второго канала подается сигнал, пропорциональный регулируемой координате первого канала.
О)Н(У1 + ,
(11)
где И и 12 - передаточные отношения механического дифференциала.
При выполнении условия И 2 следует, 4ToMi-M2jH уравнения (9)-(10) могут быть записаны в следующем виде:
(1 - ) Ki(1 - К2 Дг ) Ј -(KMi-KiKM2/02Mi,(12)
(1-KiK2##2)G K2(1-Ki/ i)K-(Км2- К2Км1#М2.(13)
Из уравнения (12) следует, что статизм 1-го канала, определяющий наклон механической характеристики в координатах wi и ML увеличивается на величину KiKM2/32, a статизм 2-го канала - на величину К2КМ2 ft 1 При выполнении условий
К1Км2й 2 КМ1,(14)
K2KMiftM-KM2,(15) достигаемых настройкой параметров Kpi и КР2 регулируемых формирователей нормированного напряжения уравнений (12) и (13) приводятся к виду
(1-KiKqSi#) Ki(1-K2/9:z)e. (16) (1 -KlK3/3i#)W2 K2(1-K21/3i)E, (17)
Уравнения (16) и (17) характеризуют двухканальную гидравлическую систему как систему, инвариантную относительно момента внешней нагрузки в статических режимах.
При выполнении условия
Ki/ 1(18) уравнения (16) и (17) приводятся к виду
И1 Ki Ј,(19) 0)2 0. (20)
С учетом выше изложенного уравнения (7) и (8) записываются в виде следующих соотношений:
(Ws(S)W2(S)-K2 Д )ал Ki(W2(S)-K2#)Ј,
(Wi(S)W2(S)-K2/32 ) ац К2 Wi(S)S Ј, (22)
где Wi(S) aniSn 1 + A(n-i) +...+ ai, что свидетельствует об отсутствии в полиноме числителя 2-го канала свободного члена. Это означает, что2-й канал по отношению к 1-му обладает дифференцирующими свойствами.
На основании полученных уравнений, характеризующих переходные процессы в системе в динамических режимах и состояние регулируемых координам в статических режимах, двухканальная гидравлическая система работает следующим образом.
Пусть к выходному валу механического дифференциала 9 приложены внешний момент нагрузки, соответствующий некоторому номинальному значению. При подаче на вход системы сигнала задания начинается процесс нарастания скоростей од и а% первого 5 и второго 6 гидродвигателей и скорости ш на выходе механического дифференцила 9.
При движении валов гидродвигателей 5 и 6 осуществляется непрерывный процесс преобразования угловых скоростей ал и ад
в сигналы, пропорциональные коэффициентам Кол и Код первого и второго датчиков угловых скоростей 7 и 8 и настройкой коэффициентов КР1 и Кр2 регулируемых формиро5 вателей нормированного напряжения.
При этом в соответствии с наличием в левых частях уравнений (21) и (22) действительных и комплексных корней, процесс разгона в 1-ом канале соответствует апериЮ одическому звену n-го порядка (или колебательного), а процесс разгона во 2 канале - дифференцирующему n-го порядка, например, как это показано на фиг.2.
Так как уравнения (21) и (22) имеют оди15 наковые полиномы то, следовательно, 1-й и 2-й каналы имеют общие условия устойчивости, Однако, если переходный процесс в 1-м канале будет содержать сумму синусных составляющих, то переходный процесс во 2-м
20 канале будет содержать сумму косинусных составляющих, что свидетельствует о том, что 1-й и 2-й каналы по отношению друг к другу обладает взаимными демпфирующими свойствами. Это означает, что на выходе
25 механического дифференциала можно получить процесс, близкий к апериодическому при наличии колебательных составляющих в 1-ом и 2-м каналах.
Таким образом в процессе разгона и
30 выхода на установившийся режим функционируют оба канала, при этом 2-й канал достигает некоторого экстремального значения, а затем в соответствии с условием (18) происходит его полное или частичное
35 отключение. Это позволяет сформировать на общем валу системы переходной процесс с максимальным быстродействием и минимальным перерегулированием (фиг.2).
Полное или частичное отключение одно- 40 го из каналов системы в установившихся режимах экономит ресурс отключенного канала, что повышает долговечность системы в целом., При изменении момента внешней на45 грузки, например в сторону увеличения, происходит возрастание моментов Mi и М2 на выходах гидродвигателей 5 и б и соответственно уменьшение угловых скоростей ом и 0)2. Однако уменьшение угловой скорости
50 yi приводит к уменьшению сигнала на втором входе сумматора 11 и соответственно к увеличению сигнала управления на входе усилителя 13 2-го канала. В свою очередь, уменьшение угловой скорости 0)2 приводит
55 к уменьшению сигнала на втором входе сумматора 10 и соответственно к увеличении сигнала управления на входе усилителя 12 1-го канала. Это обстоятельство отражается в уравнениях (7)-(10) наличием составляющих М2 и Mi соответственно в 1-ом и во 2-м каналах. Так осуществляется взаимная стабилизация угловой скорости в системе. Динамика этого процесса для случая единичного скачкообразного возмущения представлена на фиг.З.
Предложенная двухканальная гидравлическая система обладает высокими дина- мическими характеристиками в части увеличения быстродействия, минимального перерегулирования, а также улучшенных переходных процессов реализации закона слежения за нагрузкой.
Система обладает высокой надежностью, так как отказ любого из каналов приводит к потере качества, но не работоспособности.
-
Формула изобретения Двухканальная гидравлическая систе- ма, содержащая в каждом канале последовательно включенные сравнивающее устройство с входами задания и обратной связи, управляющий преобразователь и приводной электродвигатель, соединенный с насосом, гидравлически связанным с гидродвигателем, выход которого соединен с одним их входов механического дифференциала и с датчиком угловой скорости, подключенным через масштабный преобразователь к входу обратной связи сравнивающего устройства другого канала, о т л и ч а- ю щ а я с я тем, что, с целью улучшения переходных характеристик процесса перемены структуры за счет обеспечения плавности отключения одного из каналов, каждое сравнивающее устройство выполнено в виде сумматора напряжений с усилителем на выходе, а каждый масштабный преобразователь - в виде регулируемого формирователя нормированного напряжения.
Фиг. I
Фиг. 3
Составитель Ю.Гронь Техред М.Моргентал
Корректор М.Керецман
Редактор В.Савина
Заказ 1820Тираж Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва. Ж-35, Раушская наб,. 4/5
Корректор М.Керецман
| Двухканальная гидравлическая система | 1989 |
|
SU1665128A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
