ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
| Устройство для сборки | 1989 |
|
SU1731575A1 |
| Автоматическое устройство для установки вала в отверстие | 1983 |
|
SU1090521A2 |
| Многопозиционный захват промышленного робота | 1987 |
|
SU1491701A1 |
| Головка манипулятора | 1983 |
|
SU1085807A1 |
| Манипулятор для герметизированного пространства | 1988 |
|
SU1618651A1 |
| Устройство для автоматической сборки деталей | 1981 |
|
SU1007897A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Схват для сборки деталей | 1983 |
|
SU1127738A1 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
Изобретение относится к машиностроению и может быть использовано для автома- тизации сборочных процессов. Цель изобретения - повышение производительности. Устройство содержит основание и соединенную с ним упругими элементами платформу, в которой расположен захватный механизм с приводом и захватными элементами, выполненными в виде втулок, имеющих возможность синхронно сближаться, и расположенных в них губок, подпружиненных в направлении вдоль оси устройства. Кроме того, к платформе прикреплен электромагнит с якорем на упругой пластине. Во время сборки вал, зажатый подпружиненными губками, взаимодействует с якорем, от которого колебания передаются на вал. 3 ил.
Изобретение относится к машиностроению и может быть использовано для автоматизации сборочных процессов
Цепь изобретения - повышение производительности процесса сборки за счет уменьшения сопротивления вибрациям вала вдоль его оси и увеличения амплитуды вибраций.
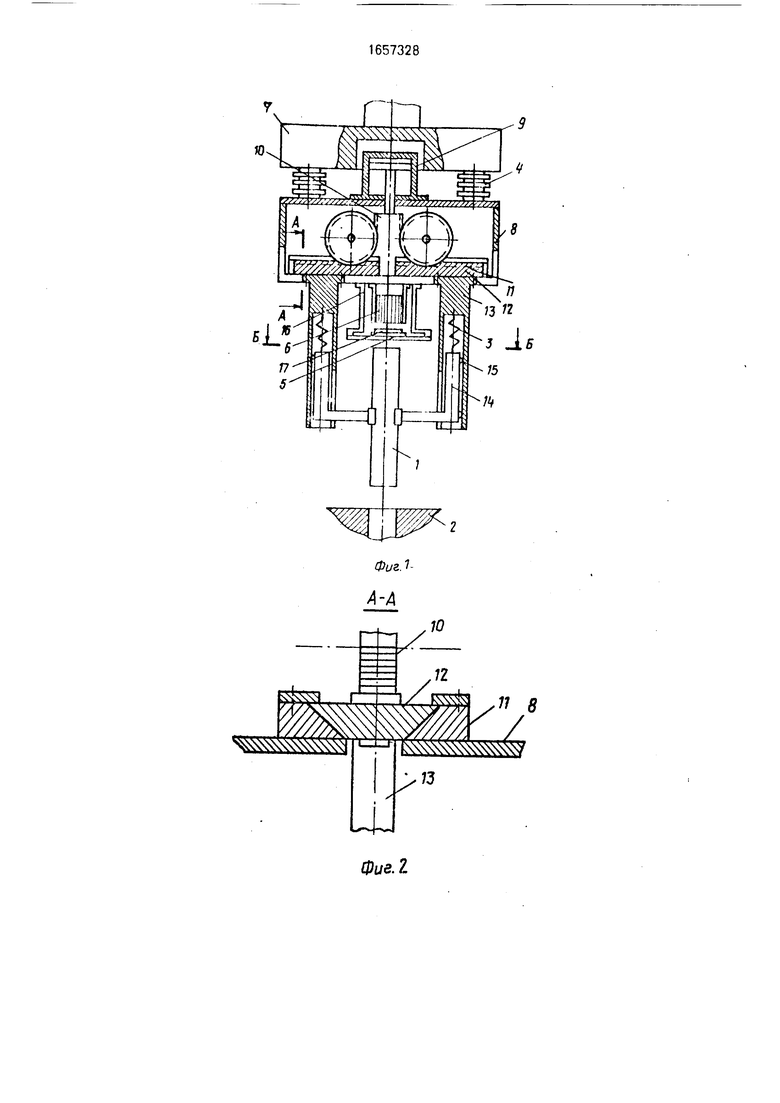
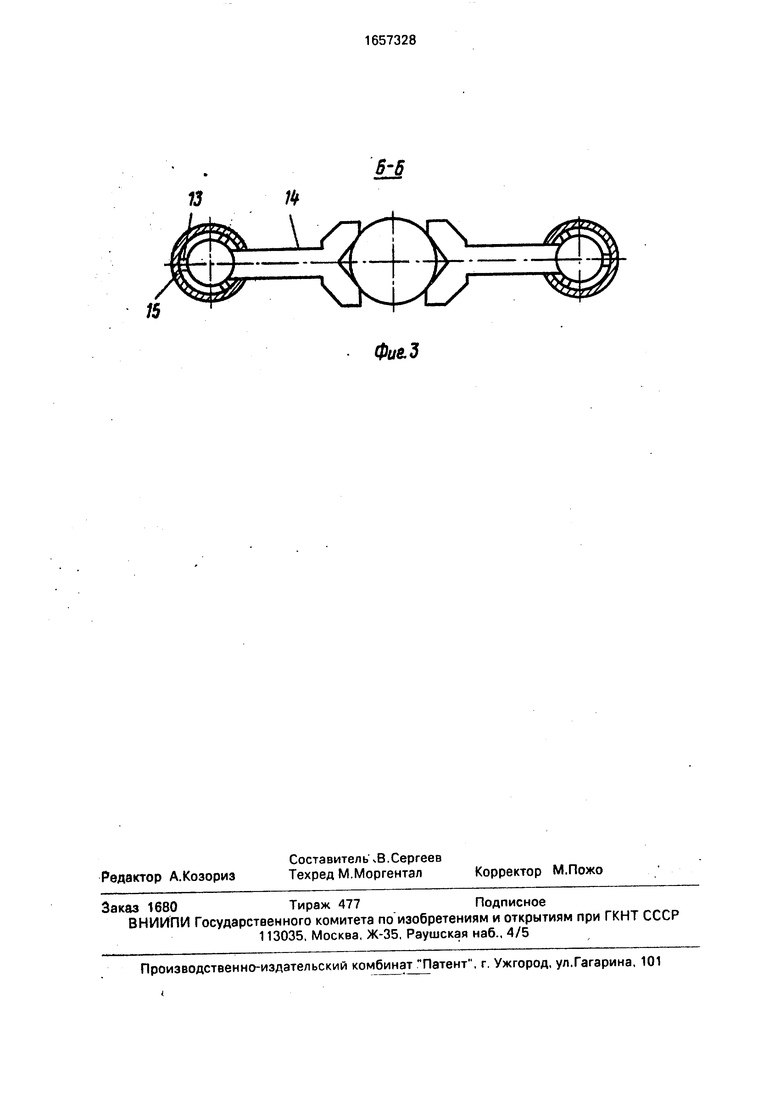
На фиг. 1 изображено устройство для установки вала; на фиг.2 - сечение А-А на фиг. 1; на фиг.З - сечение Б-Б на фиг.1.
Устройство для установки вала 1 во втулку 2 содержит упругие элементы 3 и 4, плоский упругий элемент 5, электромагнит 6, основание 7, которое крепится к руке робота, качающуюся платформу 8. которая связана с основанием упругими элементами 4. На платформе 8 размещен силовой привод механизма 9 захвата, например, пневмоцилиндр. В корпусе качающейся платформы 8 размещена зубчато-реечная
передача 10, а также направляющие 11, подвижные элементы 12 которых входят в зацепление с зубчатыми колесами реечной передачи. К подвижным элементам 12 прикреплены зажимные рычаги 13, выполненные в виде направляющих втулок, в которых на упругих элементах 3 установлены губки 14. В корпусе губок вмонтированы элементы 1Ь качения, например шарики. К нижней части качающейся платформы 8 прикреплены кронштейн 16 и электромагнит 6, якорь 17 которого расположен на плоском упругом элементе 5, жестко связанном с кронштейном 16,
Устройство работает следующим образом.
Автоматическое устройство для уста- новки вала в отверстие, закрепленное на руке робота, захватывает деталь-вал и выводит предназначенную для сборки деталь на сборочную позицию. Захват вала происхоО
ел VI
CJ
го
00
дит следующим образом С помощью сило вого привода 9,например пневмоцилпндрз и зубчато-реечной передачи 10 происходит движение подвижных элементов 12 в направляющих 11 к центру качающейся платформы 8, и зажимные рычаги 13 при- крепленные.к подвижным элементам 12 зажимают пал губками 14.
После вывода детали-вала на сборочную позицию из блока управления (не показан) поступают команды на опускание руки робота и подключение электромагнита 6 В начале процесса сборки электромагнит 6 работает как индуктивный вертикального перемещения. При опускании вала и его соприкосновении с кромкой отверстия губки 11 (, па,юм перемещаются вверх до упора его в упругий элемент 5. Вал деформирует упругий элемент 5, что вызывает уменьшение воздушного зазора между якорем 17 и катушкой электромагнита 6. При изменении воздушною зазора проис одт изменение напряжения на зажимах катушки эпектромагнита, которое для блока управления является сигналом для выдачи команды на прекращение опускания руки робота.
Зажимные рычаги 13 в виде направляю щих втулок, в которых размещены губки 14 и упругие элементы 3, создают определенную силу нормального давления между одним концом вала и сопрягаемой деталью и между плоским упругим элементом Б и другим концом вала. Крепление качающейся платформы 8 к основанию 1 через упругие элементы 4 способствует, пои наличии силы нормального давления между собираемыми деталями, повороту вала на определенный
угол относительно продольной оси устройства
Электромагнит 6 через плоский упругий элемент 5 создает колебания вала в направ/гении его оси Наличие осевых колебаний вала и горизонтальной составляющей силы нормального давления между собираемыми деталями способствует смещению вала в сторону совмещения сопрягаемых поверх0 ностей и установке его в отверстие под действием упругих элементов 3 при совмещении оси вала и оси отверстия.
После сопряжения собираемых деталей с помощью пневмоцилиндра 9 и зубчато-ре5 ечной передачи 10 подвижные элементы 12 отводятся от центра качающейся платформы 8, и зажимное рычаги 13, прикрепленные к подвижным элементам 12, отпускают вал Рука poRuiаогводится в исходное поло0 жение, и цикл сборки повторяется Формула изобретения Устройство для установки вала в отверстие, содержащее основание, качающуюся платформу, прикрепленную к основанию с
5 помощью упругих элементов на которой расположен механизм захвата одной из собираемых деталей с захватными элементами ii привод механизма захвата, отличаю- щ е е с я тем, что, с целью повышения
0 производительности, захватные элементы выполнены в виде параллельных втулок. симметричных относительно оси устройства и имеющих возможность синхронного пло- скоппраллельного перемещения в направ5 лении к оси устройства, причем в указанных втулках расположены подпружиненные губки, имеющие возможность перемещения вдоль осей втулок.
И 8
Фие.3
| Устройство для сборки деталей типа вал-втулка | 1984 |
|
SU1177112A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
