Изобретение относится к машиностроению, а именно к захватам трансроботов, шаговых транспортеров, манипуляторов, и может быть использовано для механизации и автоматизации процессов, в частности для автоматических линий механической обработки и сборки с применением спутниковой технологии.
Целью изобретения является повышение надежности и упрощение конструкции захвата путем неподвижного закрепления штанг в корпусе, на которых установлены с возможностью осевого перемещения траверсы с захватными рычагами, применения фиксаторов в виде регулируемых по длине собачек, зацепляющихся с траверсами в рабочем положении, а также установки упоров на траверсах взаимодействующих с датчиками положения.
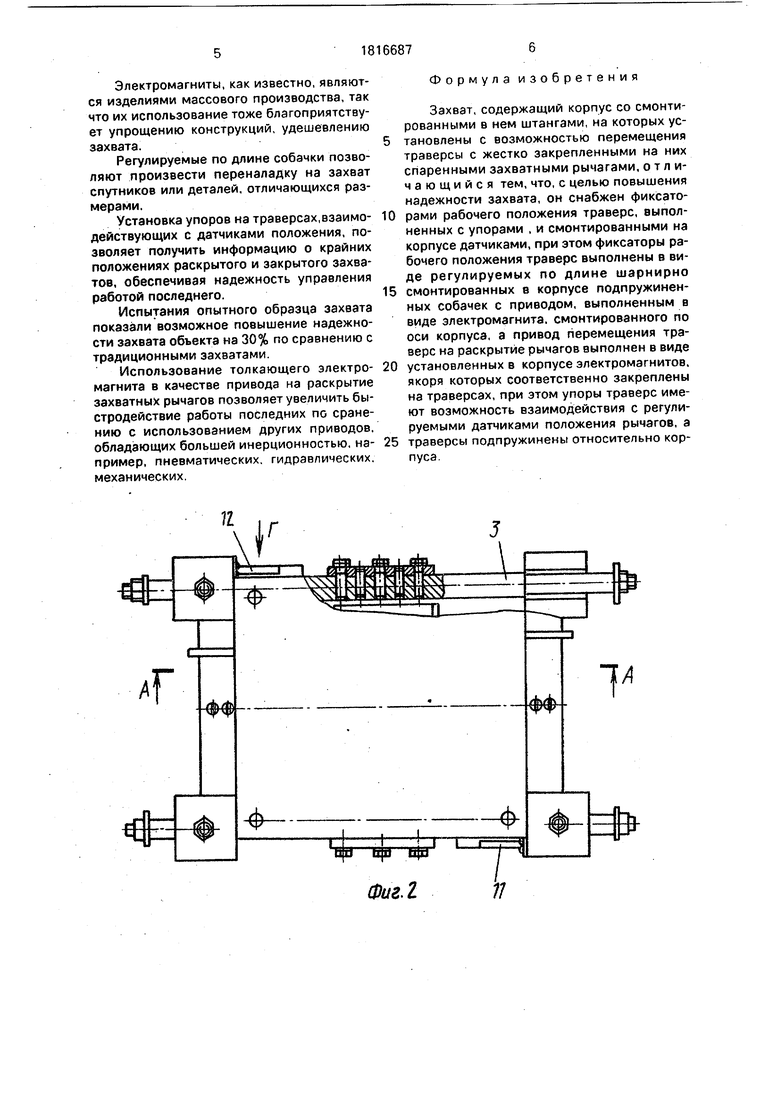
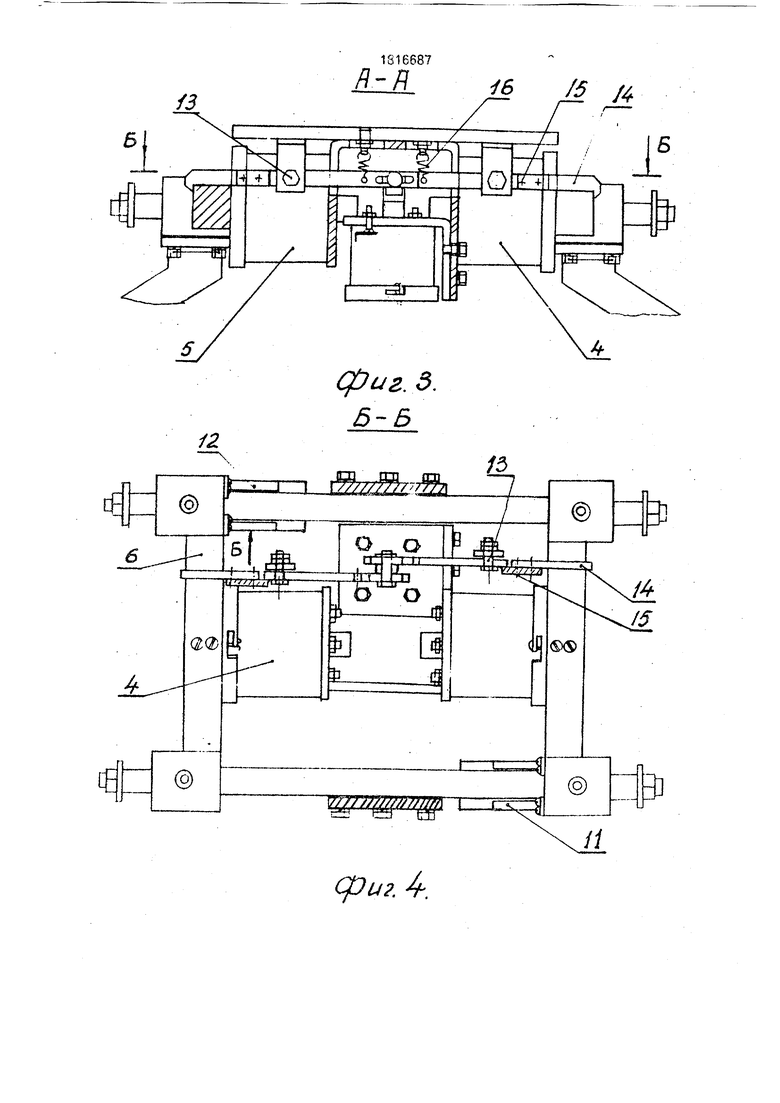
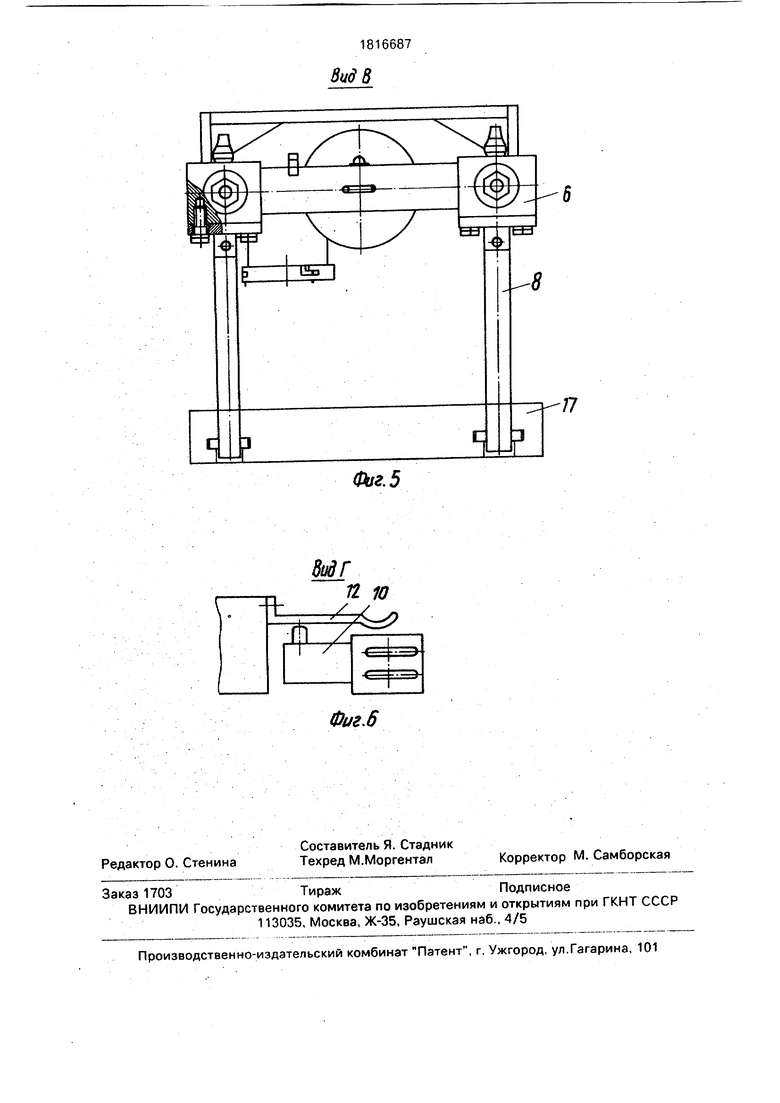
На фиг.1 представлен захват, общий вид; на фиг.2 - то же, вид сверху; на фиг.З - разрез А-А на фиг.2; на фиг.4 - разрез Б-Б на фиг.З; на фиг.5 - вид В на фиг.1; на фиг.6 - вид Г на фиг.2.
Захват содержит следующие узлы и детали.
Корпус 1 с фланцем 2 для крепления к рабочему органу трансробота (манипулятора) с вмонтированными в нем штангами 3.
В корпусе закреплены в качестве приводов два толкающих 4 и один тянущий 5 электромагниты.
На штангах 3 установлены траверсы 6, в котррых закреплены якоря электромагнитов 4 винтами 7 и спаренные (по две штуки) захватные рычаги 8, удерживаемые в исходных положениях пружинами растяжения 9,
Наличие специальных концов захватных рычагов желательно , но не обязательно. Возможен вариант концов любой конфигурации, например плоские концы входят под плоскую плиту спутника или другого объекта, однако наличие специальных концов захвата, например Т-образных по форме сопрягаемых поверхностей в объекте перемещения, обеспечивает более надежное удержание объекта.
Регулируемые по горизонтали датчики положения (микропереключатели) 10, взаимодействующие с упорами 11 и 12 установлены на корпусе (по две штуки для большой надежности),
В корпусе на шарнирах 13 смонтированы собачки 14, регулируемые по длине винтами 15 (в фасолеобразных пазах), взаимодействующие с траверсами 6 посредством пружин растяжения 16 и тянущего электромагнита 5.
Захват работает следующим образом.
Перед опусканием захвата рукой трансробота над объектом переноса 17 (спутник с заготовками) подается команда на включение тянущего электромагнита 5 и оба фиксатора (собачки) 14, поворачиваясь на шарнирах 13, освобождают траверсы 6 с захватными рычагами 8; согласно алгоритма включаются толкающие электромагниты 4, выдвигая траверсы с захватными рычагами в крайнее внешнее положение (захватные рычаги раскрыты); информация о положении фиксируется датчиком положения 10 посредством упора 12.
При подаче захвата к объекту переноса
5 17 напряжение с толкающих электромагнитов 5 снимается и захватные рычаги под действием пружин растяжения 9 входят своими концами в соответствующие направляющие или отверстия объекта переноса, При
0 этом факт захвата подтверждается датчиком положения 10, включенным упором 11. После этого напряжение с тянущего электромагнита 5 снимается и собачки под действием пружин 16 зацепляются за тра5 версы 6 с захватными рычагами 8 в рабочем положении.
В этом случае даже при отключении напряжения захватные рычаги остаются надежно закрытыми.
0 в дальнейшем осуществляются операции передачи (перемещения) объекта 17 согласно алгоритму на следующую позицию, захват с объектом опускается рукой транс- робота, включается тянущий электромагнит
5 5, собачки 14 поворачиваются на шарнирах 13, траверсы освобождаются, включаются толкающие электромагниты 4 и захватные рычаги 8 перемещаются во внешнее крайнее положение (захватные рычаги раскрыо ты). Объект перемещения позиционируется на заданной позиции.
Захватные рычаги готовы к захвату следующего объекта перемещения.
Захват может быть переналажен на ра5 боту с другими по форме и размерам объектами. Для этого требуется регулировать собачки по длине и в случае необходимости заменить захватные рычаги на рычаги с соответствующими концами.
0 Установка штанг в корпусе неподвижно и траверс со спаренными захватывающими рычагами, скользящими по штангам, обеспечивает жесткость системы, при этом захватные рычаги преимущественно
5
удерживают спутники или детали не за счет сил трения, а сил среза и изгиба наконечников захватных рычагов/ на что требуется иметь меньшей мощности приводы, следовательно меньше габариты захватов, проще его конструкцию.
Электромагниты, как известно, являются изделиями массового производства, так что их использование тоже благоприятствует упрощению конструкций, удешевлению захвата.
Регулируемые по длине собачки позволяют произвести переналадку на захват спутников или деталей, отличающихся размерами.
Установка упоров на траверсах,взаимо- действующих с датчиками положения, позволяет получить информацию о крайних положениях раскрытого и закрытого захватов, обеспечивая надежность управления работой последнего.
Испытания опытного образца захвата показали возможное повышение надежности захвата объекта на 30% по сравнению с традиционными захватами.
Использование толкающего электро- магнита в качестве привода на раскрытие захватных рычагов позволяет увеличить быстродействие работы последних по сране- нию с использованием других приводов, обладающих большей инерционностью, на- пример, пневматических, гидравлических, механических.
Формула изобретения
Захват, содержащий корпус со смонтированными в нем штангами, на которых установлены с возможностью перемещения траверсы с жестко закрепленными на них спаренными захватными рычагами, отличающийся тем, что, с целью повышения надежности захвата, он снабжен фиксаторами рабочего положения траверс, выполненных с упорами , и смонтированными на корпусе датчиками, при этом фиксаторы рабочего положения траверс выполнены в виде регулируемых по длине шарнирно смонтированных в корпусе подпружиненных собачек с приводом, выполненным в виде электромагнита, смонтированного по оси корпуса, а привод перемещения траверс на раскрытие рычагов выполнен в виде установленных в корпусе электромагнитов, якоря которых соответственно закреплены на траверсах, при этом упоры траверс имеют возможность взаимодействия с регулируемыми датчиками положения рычагов, а траверсы подпружинены относительно корпуса.
1816687
MB
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕСКОПИЧЕСКОЕ ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО | 1990 |
|
SU1837550A1 |
| Устройство для пробивки отверстий в материале | 1989 |
|
SU1690918A1 |
| Противоугонное устройство крана | 1986 |
|
SU1409574A1 |
| Грузозахватное устройство | 1977 |
|
SU839978A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 1972 |
|
SU349631A1 |
| Самоходная тележка многоопорной дождевальной машины | 1988 |
|
SU1697636A1 |
| Шаговый конвейер | 1979 |
|
SU839903A1 |
| Устройство для выгрузки кормов из башен | 1984 |
|
SU1192716A1 |
| Устройство для перемещения объектов в рабочую зону | 1983 |
|
SU1122503A1 |
| Автоматический клещевой захват | 1979 |
|
SU887419A1 |
Использование: е-машиностроении, в захватах транероботов, шаговых транспортеров и манипуляторов для механизации и автоматизации процессов обработки и сборки. Сущность изобретения: устройство содержит корпус 1 с вмонтированными в нем штангами 3, на которых установлены подпружиненные траверсы 6с закрепленными на них спаренными захватными рычагами 8. Кроме того, на корпусе смонтированы фиксаторы положения траверс 6, выполненные в виде подпружиненных собачек, связанных с приводом, выполненным в виде 4 электромагнита 5, а привод перемещения траверс на раскрытие выполнен в виде ус- тайовленных в корпусе электромагнитов 4, якоря которых закреплены на траверсах. При осуществлении захвата объекта 17 включается электромагнит 5, оба фиксатора (собачки), поворачиваясь на шарнирах, освобождают траверсы 6 с рычагами 8. Включаются электромагниты 4, выдвигая траверсы в крайнее внешнее положение. Далее напряжение с электромагнитов 4 снимается и рычаги 8 под действием пружин 9 захватывают объект. Факт захвата подтверждается датчиком положения 10, включенным упором 11, После этого напряжение с электромагнита 5 снимается и собачки под действием пружин зацепляются за траверсы 6 с захватными рычагами 8 в рабочем положении. Регулируемые по длине собачки позволяют произвести переналадку на захват деталей различных размеров, 6 ил. Ю V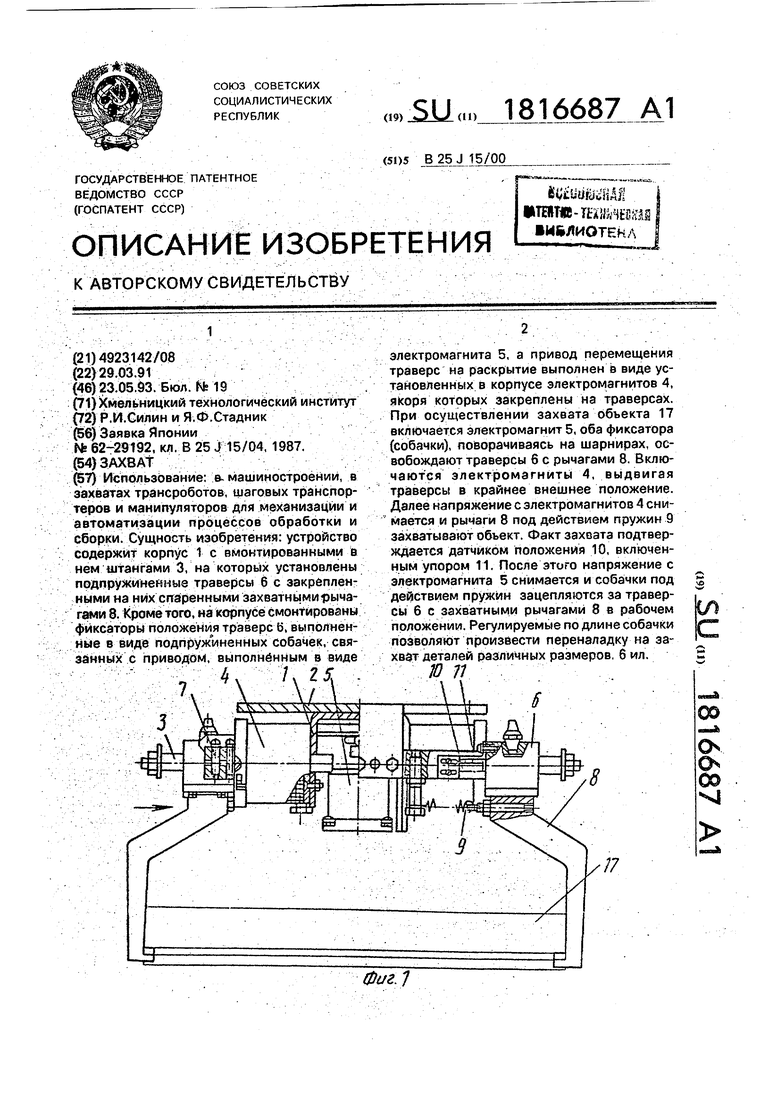
Фиг.6
Фиг. 5
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
