органом, механизм задания шага подачи, датчики, отсекатель, механизм прижима материала.
Механизм совмещения содержит фиксаторы 3, выполненные з виде стержней, направляющий шток 4, приводную поперечину 5, установленную в пазу 6.
Механизм удаления отходов содержит лотки 7 приема отходов, закрепленные при помощи рычагов 8 на приводном валу 9, несущем противовес 10 для прижима лотков к матрице 11, и управляющий кулачок 12, взаимодействующий с роликом 13 поперечины 5.
Механизм прижима материала содер- жнт двуплечие зажимные рычаги 14, закрепленные на приводных штангах 15,
На столе 16 вьчюгнены стенка 17, образующие лотки для перемещения.материала, установлены толкающие и тянущие подаю- щие валки, выполненные в виде роликов 18, связанных с редукторами 19, и ведомых подпружиненных роликов 20, и смонтированы подающие каретки, выполненные в виде ползуна 21 с подпружиненными собачками 22 и перемещающиеся по направляющим 23.
Собачки имеют ребро 24.
Механизм задания шага подачи содержит рычаги-упоры, выполненные в виде сиг- нализирующих упоров 25-36, поворотные валы 37-48, приводы поворота, выполненные в виде силовых цилиндров 49-60. На валах 37-48 закреплены индукционные датчики 61-72.
Механизм торможения содержит эксцентрики противоотдачи 73, установленные свободно на валах 74,
Отсекатели выполнены в виде лапки 75, жестко закрепленный на валу 76, несущем рычаг 77, взаимодействующий с индукционным датчиком 78.
Устройство также содержит электрозолотник 79, конечный выключатель 80, электрозолотник 81, силовой цилиндр 82, кулачок 83, конечный выключатель 84 и 85, электрозолотник 86, силовой цилиндр 87, конечный выключатель 88, элктрозолотник 89, силовой цилиндр 90, конечный выключатель 91-94, электрозолотник 95, конечный выключатель 96, электрозолотник 97, упор 98, конечный выключатель 99, рычаг 100.
Матрица 11 имеет отверстия 101 и установлена на станине 102. Пуансоны 103 установлены на ползуне 104.
Особенности работы устройства для прошивки первого отверстия.
Приемные упоры 75, получив сигнал от индукционного датчика 78 отсекателей об освобождении рабочей зоны автоматического устройства, дает команду зенковочно- му автомату (не показан) или межстаночному накопителю (не показан) на подачу заготовок (бичей) к устройству, Одновременно индукционный датчик 78 дает сигнал всем сигнализирующим-упорам на занятие рабочего положения. Поданные заготовки подхватывают подающие ролики 18 и досылают до приемных упоров 25, Как только в лотках все заготовки дойдут до упоров, так индукционные датчики 61 дадут команду на остановку роликов 18 и с задержкой дают команду цилиндру 49 через электрозолотник 79 на удаление с рабочей зоны упоров 25, Во время подъема приемных упоров выступ на головке штока цилиндра 49 нажмет на конечный выключатель 80, который через электрозолотник 81 даст команду цилиндру 82 на перемещение ползуна 21, собачки 22 которого во время движения попадают в отверстия и их ось подводят под ось пуансонов. В конце подачи кулачок 83 нажмет на конечный выключатель 84, который даст команду через электрозолотник 81 цилиндру 82 на возвращение ползуна 21 с собачками 22 в исходное положение, где кулачок 83 нажимает на конечный выключатель 85, который даст команду через электрозолотник 86 цилиндру 87 на точное совмещение осей отверстий с осями пуансонов при помощи фиксаторов 3. По завершении фиксации упор на головке штока цилиндра 87 сконтак- тирует с конечным выключателем 88, откуда поступит команда через электрозолотник 89 цилиндру 90 на зажатие заготовок. После зажатия сработает конечный выключатель 91, отчего сработает электрозолотник 86 и цилиндр 87 опустит фиксаторы 3 в исходное положение. В верхнем положении упор головки цилиндра 87 нажмет на конечный выключатель 92, который даст команду ползуну пресса 1 на прошивку квадратного отверстия. В исходном положении ползуна кулачок сконтактирует с конечным выключателем 93, от которого через золотник 89 цилиндром 90 произойдет разжатие заготовок. В нижнем положении упор головки штока цилиндра 90 нажмет на конечный выключатель 94, откуда поступит команда подающим роликам 18 на подачу бичей до упоров 26.
Пробивка последующих отверстий.
Как только в лотках все бичи дойдут до упоров 26, так индукционные датчики 62 сработают и дадут команду на прекращение подачи бичей роликами 18 и с задержкой дают команду через электрозолотник 95 цилиндру 50 на удаление упоров 26 с рабочей зоны (подъем упоров). Во время подъема упоров вспомогательный рычажок, закрепленный на валу 38 (фиг. 1), с контактирует с конечным выключателем 96 (фиг. 6), откуда поступит команда через электрозолотник 81 цилиндру 82 на перемещение ползуна 21 с собачками 22. Далее процесс повторяется по вышеописанному: собачки подводят оси отверстий под оси пуансонов, затем ползун 21 вместе с собачками 22 возвращаются в исходное положение, а фиксаторы 3 устанавливают точное совпадение осей отвер- стий с осями пуансонов. После фиксации следует зажатие заготовок, затем удаление фиксаторов в исходное положение, потом идет прошивка квадрата, вслед за этим сле- дуетразжатие заготовок, а уже после этого совершается подача бичей до следующих упоров. Так процесс пробивки квадрата в отверстии будет повторяться до предпоследнего упора 35 с сигнализаторами 71, смонтированными на валу 47.
Особенности работы устройства при пробивке квадрата в последнем отверстии.
Как только все бичи дойдут до упоров 36, так индукционные датчики 72 дадут команду подающим роликам 18 на прекраще- ние подачи бичей и с задержкой дают команду электрозолотнику 97, затем цилиндру 60 на опускание упоров 36. Во время поворота вала 48 упор 98 нажмет на конечный выключатель 99, который даст команду через электрозолотник 81 цилиндру 82 на перемещение ползуна 21 с собачками 22. Далее процесс работы повторяется: разжатие деталей двуплечими рычагами 14, конечный выключатель 94 дает команду подающим роликам 18 и роликам на транспортном устройстве на удаление бичей из рабочей зоны устройства. При удалении из рабочей зоны всех бичей лапки 75 отсекате- лей опустятся, а рычаг 77 сконтактирует с индукционным датчиком 78, который даст команду всем упорам занять рабочее положение и подготовит приемные упоры 25 дл в вертикальномви- и стержневых фиксаторов- я приема заготовок от следующих агре- гатов.
Автоматическое устройство просто в изготовлении, просто в настройке и эксплуатации и намного повышает производительность труда.
Формула изобретения Устройство для , пробивки
отверстий в материале, содержащее: пресс, штамп, имеющий пуансоны, закреп- ленные на ползуне пресса, и матрицу с отверстиями для прохода пуансонов, смонтированную на станине пресса, по меньшей мере один лоток для перемещения материала, одну пару толкающих подающих
вчлков, расположенных перед прессом по ходу подачи материала, одну пару тянущих подающих валков, установленных за тянущими подающими валками по ходу подачи материала, по меньшей мере одну подающую каретку, несущую захватный орган и расположенную между толкающими подающими валками и прессом, один механизм торможения и один механизм задания шага подачи, от л ичающеес я тем, что, с целью расширения технологических возможностей путем пробивки отверстий в штучных заготовках и повышения производительности процесса пробивки, оно снабжено датчиками, по меньшей мере одним отсекателем, выполненным в виде лапки- установленной с возможностью поворота в вертикальной плоскости и расположенной за тянущими подающими валками по ходу подачи материала механизмом прижима материала, выполненным в виде приводных штоков; установленных с возможностью перемещения в вертикальном направлении- приводных штанг и двуплечих зажимных рычагов, закрепленных на приводных штангах перпендикулярно к оси подачи материала и с возможностью взаимодействия с матрицей механизмов совмещения осей отверстий матрицы с осями пуансонов, выполненным в виде приводной поперечиных установленной с возможностью перемещения в вертикальном направлении, и стержневых фиксаторов, закрепленных на приводной траверсе с возможностью взаимодействия с отверстиями,и механизмом удаления отходов, выполненным в виде приводного вала, смонтированного горизонтально и несущего рычаг с противовесом, по меньшей мере одного лотка приема отходов, жестко закрепенного на приводном валу и расположенного под отверстиями матрицы, и кулачка, смонтированного на валу с возможностью взаимодействия с приводной поперечиной, причем захватный орган выполнен в виде собачки, шарнирно закрепленной на подающей каретке с возможностью поворота в вертикальной плоскости и попружиненной в направлении к оси подачи, механизм торможения выполнен в виде по меньшей мере двух поворотных в вертикальной плоскости эксцентриков, один из которых установлен между толкающими подающими валками и подающей кареткой, другой эксцентрик расположен между прессом и тянущими подающими валками, механизм задачи шага подачи выполнен в виде поворотных валов, несущих поворотные рычаги, смонтированных по обе стороны пресса и расположенных последовательно один за другим в направлении
подачи материала, приводов поворота пово-вия с рычагами-упорами, один из датчиков
ротных рычагов, и рычагов-упоров, шарнир-установлен с возможностью взаимодейстно закрепленных на поворотных рычагах,вия с лапкой, а другая часть датчиков устачасть датчиков смонтирована на поворот-новлена с возможностью взаимодействия с
ных рычагах с возможностью взаимодейст-5 подающей кареткой.
е
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ МНОГОЛОТКОВАЯ ЛИНИЯ | 1989 |
|
RU2023569C1 |
| Транспортное устройство | 1989 |
|
SU1808639A1 |
| МЕЖСТАНОЧНЫЙ МНОГОСЕКЦИОННЫЙ НАКОПИТЕЛЬ | 1989 |
|
RU2044615C1 |
| Многошпиндельный сверлильный автомат | 1989 |
|
SU1748966A1 |
| Транспортная система | 1989 |
|
SU1808640A1 |
| МНОГОСЕКЦИОННОЕ ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1990 |
|
RU2021187C1 |
| Отрезной автомат | 1990 |
|
SU1731603A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ И ФИКСАЦИИ ДЕТАЛЕЙ ТИПА ЗУБЧАТАЯ РЕЙКА | 1989 |
|
RU2023545C1 |
| Устройство для подачи полосового и ленточного материала в рабочую зону пресса | 1983 |
|
SU1091967A1 |
| Многопозиционный штамп для обработки штучных заготовок | 1980 |
|
SU940950A1 |
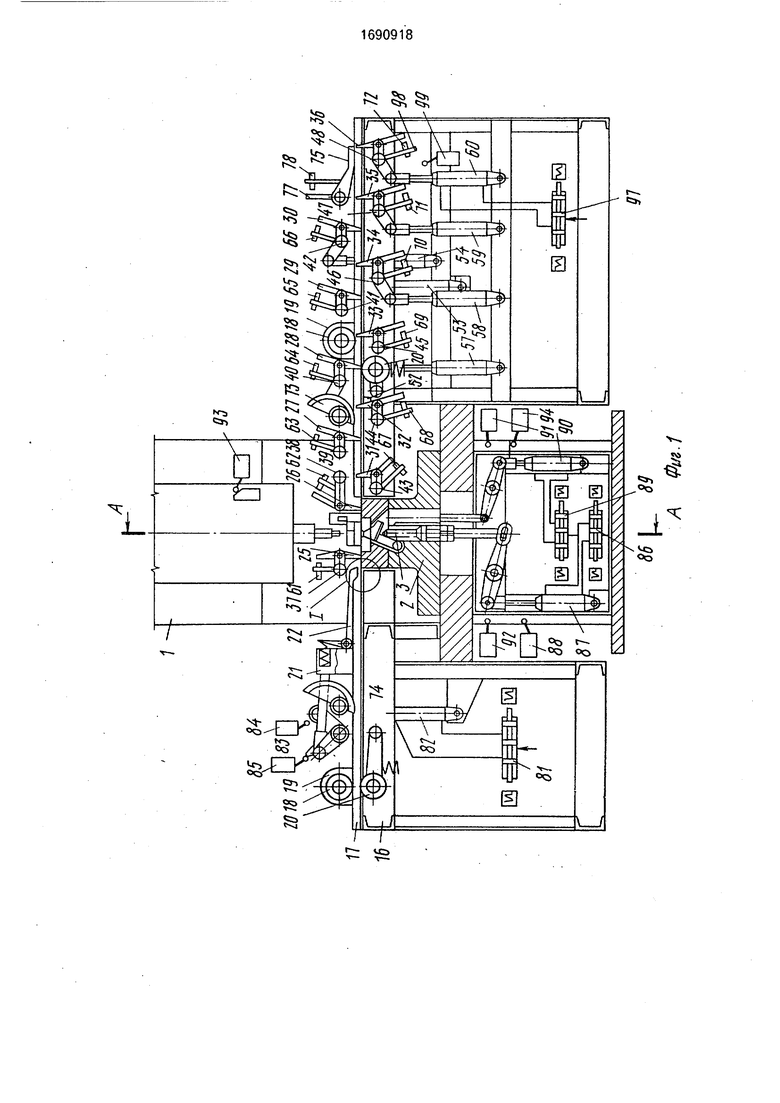
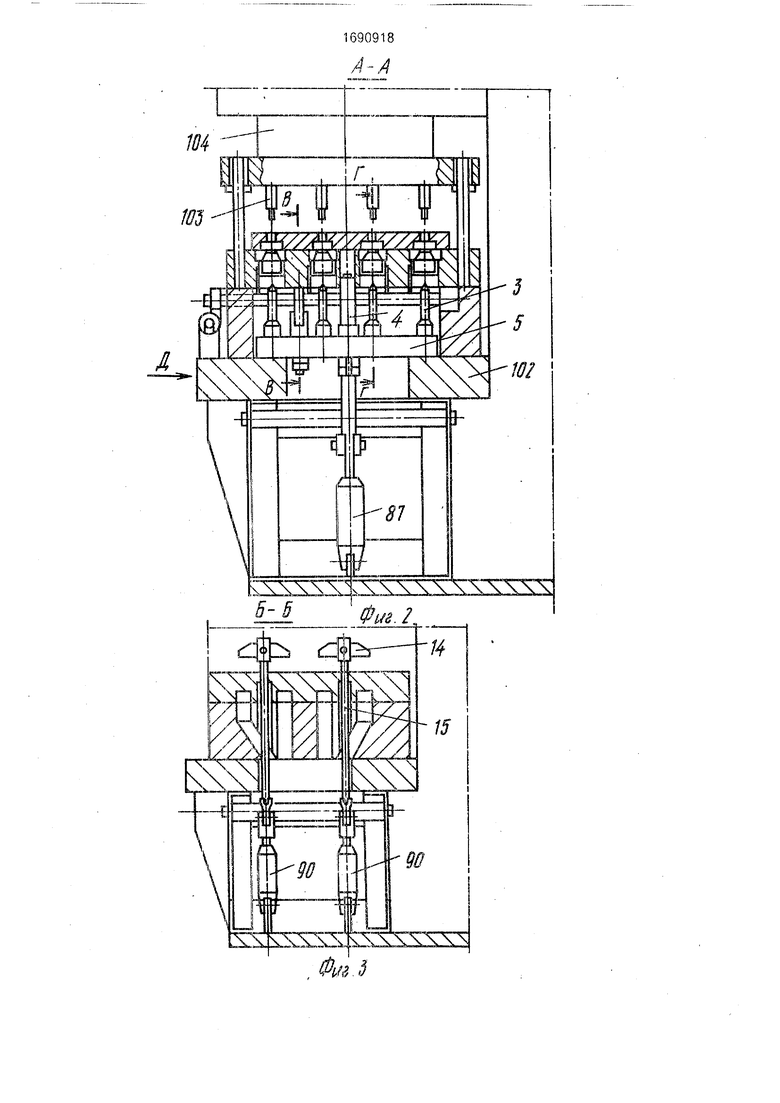

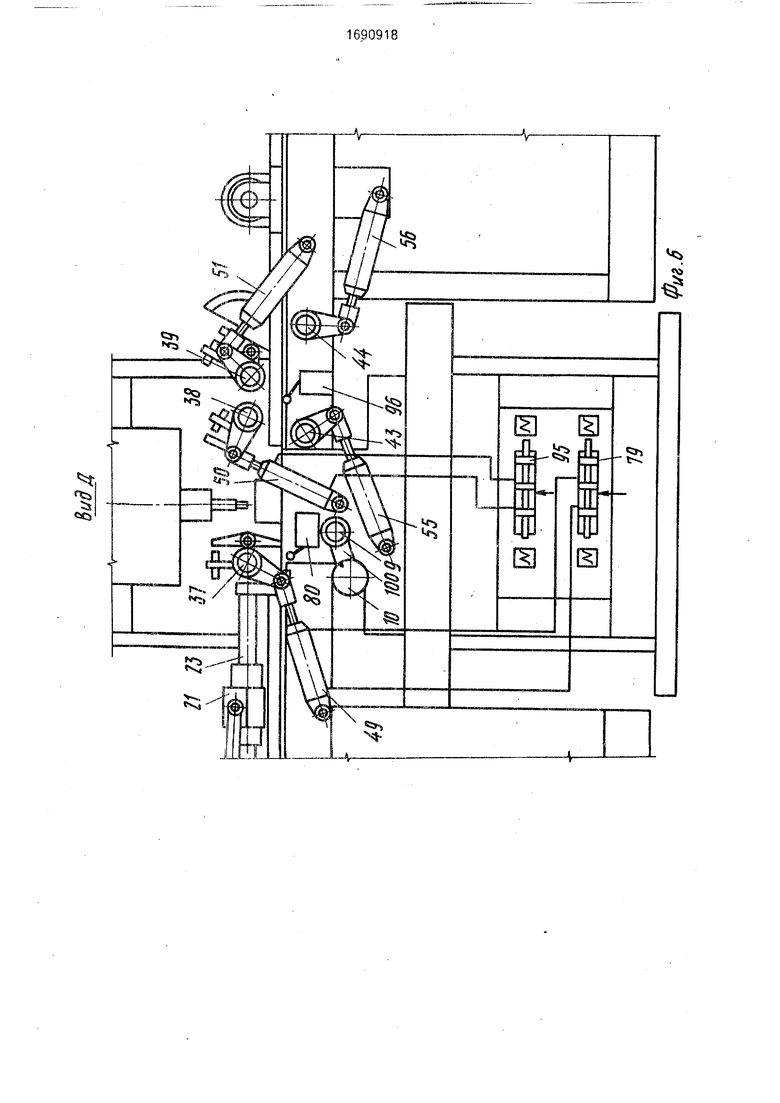
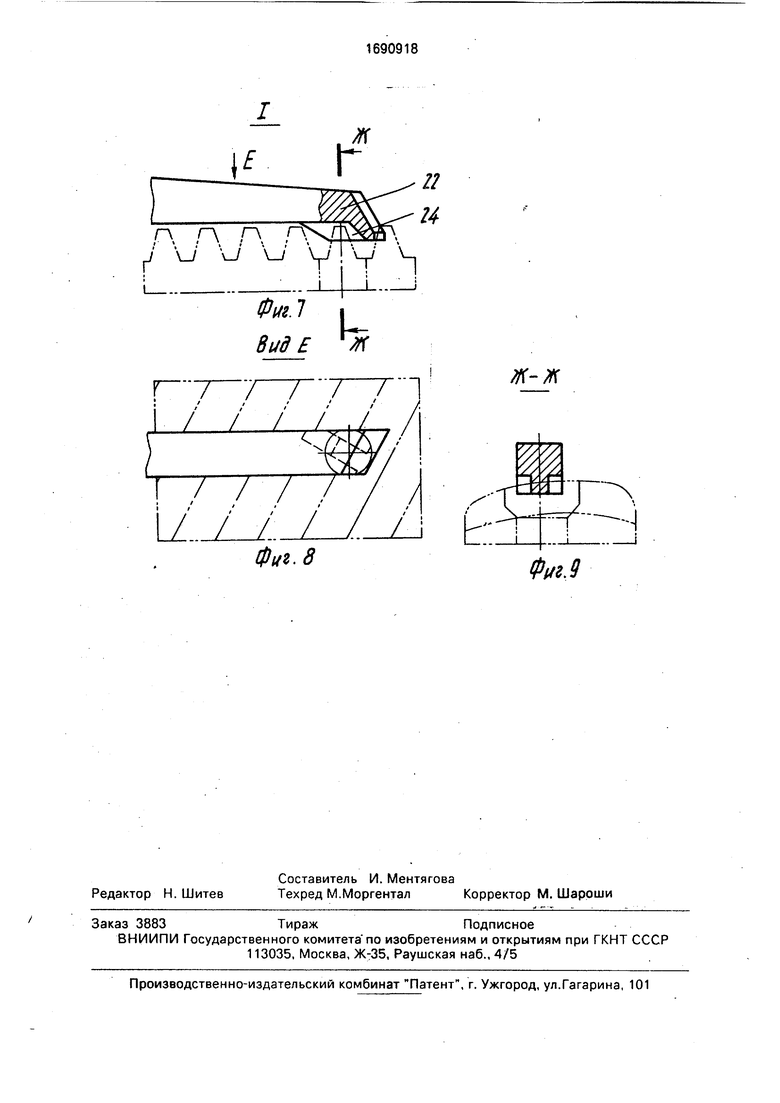
Изобретение относится к обработке металлов давлением и может быть использовано для пробивки отверстий в материале. Цель изобретения - расширение технологических возможностей путем пробивки отверстий в штучных заготовках и повышение производительности процесса пробивки. Устройство содержит пресс, штамп с пуансоном и матрицей, лотки для перемещения материала, толкающие и тянущие подающие валки, подающие каретки, несущие захватные.органы, механизмы торможения, механизмы задания шага подачи, датчики, отсекатели, механизм прижима, механизм Изобретение относится к обработке металлов давлением и может быть использовано для пробивки отверстий в материале. Цель изобретения - расширение технологических возможностей путем пробивки отверстий в штучных заготовках и повышение производительности процесса пробивки. На фиг. 1 изображено устройство для пробивки отверстий в материале; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез совмещения отверстий матрицы с пуансонами, механизм удаления отходов, Отсека- тель выполнен в виде поворотной лапки, установленной за тянущими валками, и взаимодействует с датчиком. Механизм прижима содержит приводные штоки, несущие двуплечие зажимные рычаги. Механизм совмещения имеет приводную поперечину, несущую стержневые фиксаторы. Механизм удаления отходов содержит приводной вал, несущий рычаг с противовесом и лотки приема отходов из отверстий матриц, кулачок, закрепленный на валу и взаимодействующий с приводной поперечиной. Захватный орган выполнен в виде собачки, механизм торможения выполнен в виде поворотных эксцентриков противоотдачи, расположенных по обе стороны пресса. Механизм задания шага подачи содержит поворотные валы, связанные с приводами поворота и расположенные вдоль оси подачи по обе стороны пресса. На валах установлены поворотные рычаги и датчики. На поворотных рычагах шарнирно закреплены рычаги-упоры взаимодействующие с датчиками. 9 ил. Б-Б на фиг. 1; на фиг. 4 - разрез фиг. 2; на фиг. 5 - разрез Г-Г на фиг. 2; на фиг, 6 - вид Д на фиг. 2; на фиг. 7 - узел I на фиг. 1; на фиг, 8 - вид Е на фиг. 7; на фиг. 9 - разрез Ж-Ж на фиг. 7. Устройство содержит пресс 1, штамп 2, механизм совмещения осей отверстий матрицы с осями пуансонов, механизм удаления отходов, лотки для перемещения материала, толкающие и тянущие подающие валки, подающую каретку с захватным сл с о о о о оо
VO
i %. I j -«.
M
Фив А
Ч §
QC5
К
Г
гл г гл ГТчЖзайЛ г/ VJ w J у; Vy V-,
7 L
Ј Ьг
/ /
/ ./.,/
. /
г / / / /
u:.
«. 8
/; /
Ж-Ж
Фиг. 9
| Установка для обработки ленточного материала | 1987 |
|
SU1530306A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
