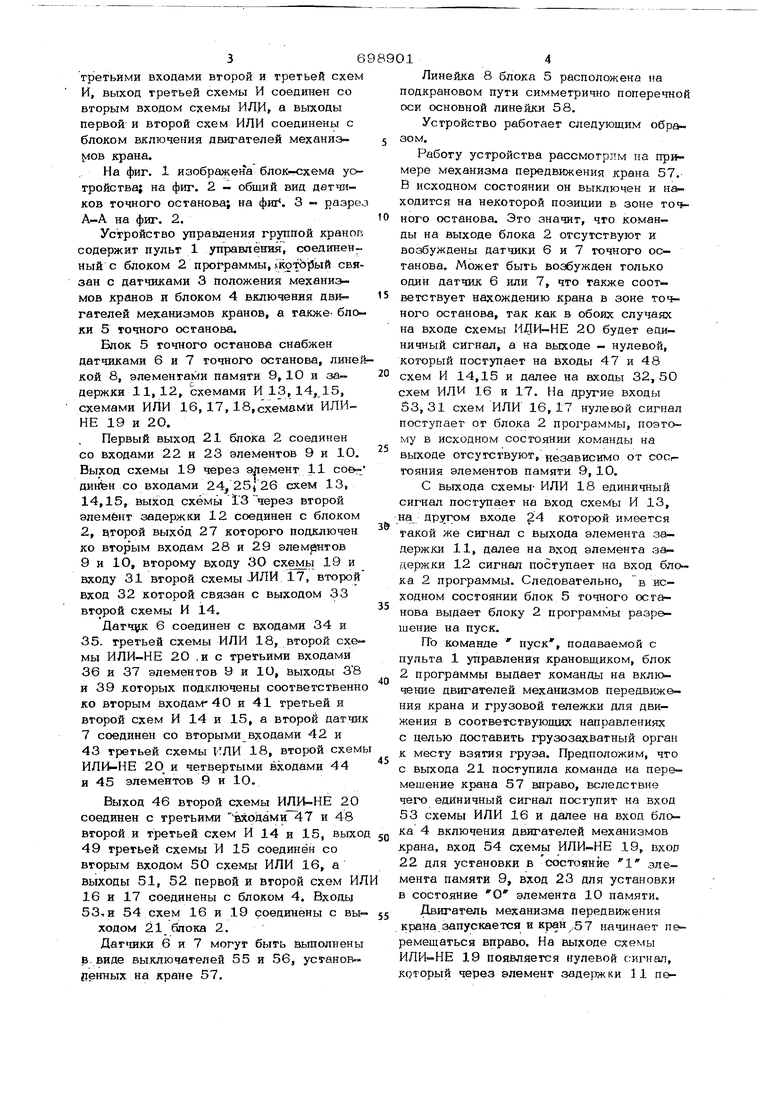
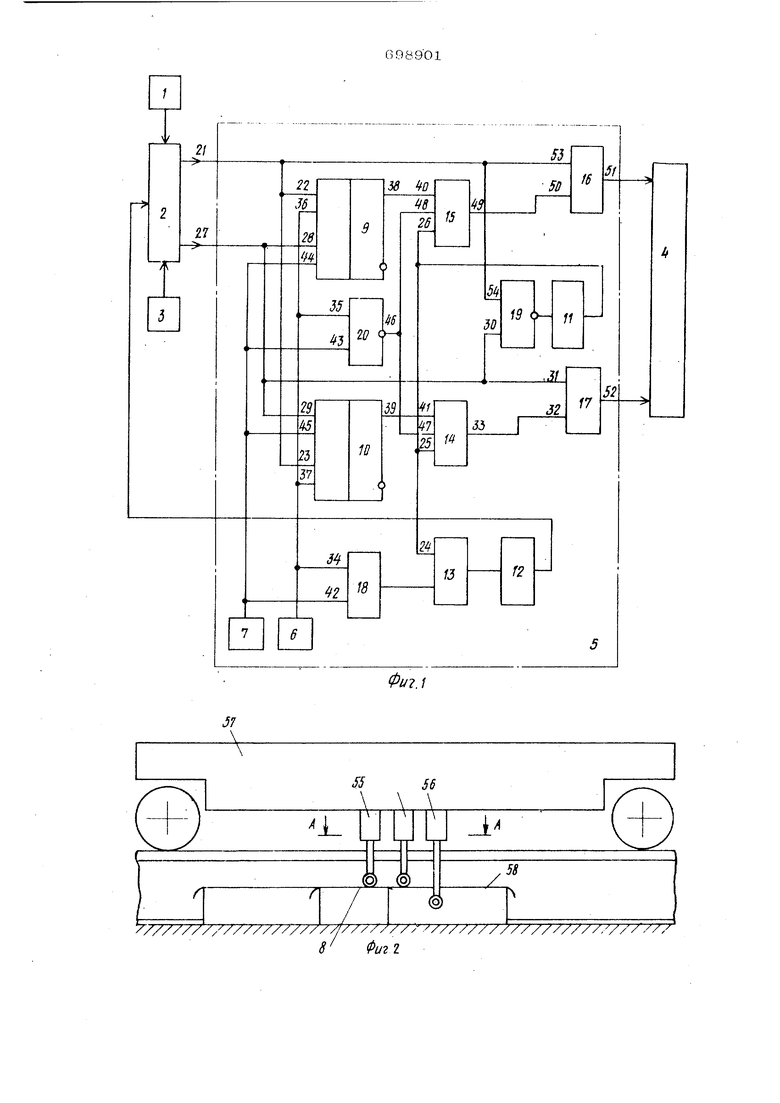
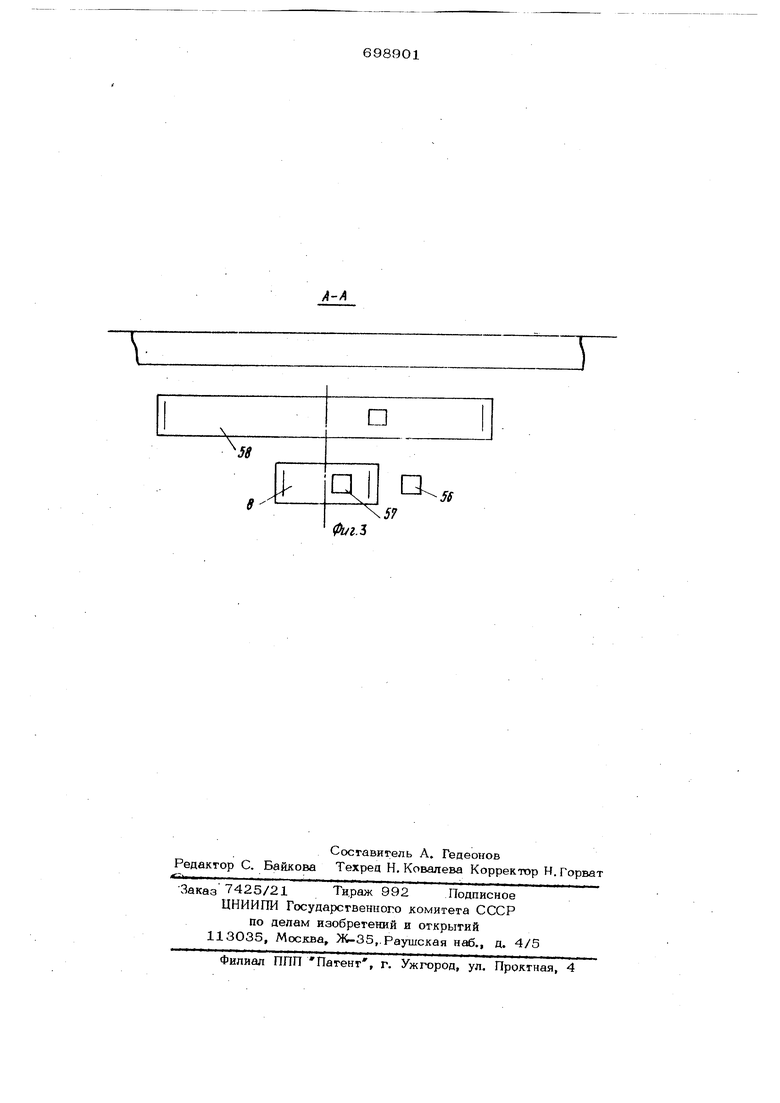
(54) УСТРОЙСТВО УПРАВЛЕНИЯ ГРУППОЙ КРАНОВ третьими входами второй и третьей схем И, выход третьей схемы И соединен со вторым входом схемы ИЛИ, а выходы первой и второй схем ИЛИ соединены с блоком включения двигателей механиэ5ЛОВ крана. На фиг. 1 изображена блок-схема ус тройства; на фиг. 2 - общий вид датчиков точного останова; на фиг. 3 - разре А-А на фиг. 2. Устройство управления группой кранов содержит пульт 1 управления, соединенный с блоком 2 программы, );котЬ 5ый свя зан с датчиками 3 положения механизмов кранов и блоком 4 включения двигателей механизмов кранов, а также- блоки 5 точного останова. Блок 5 точного останова снабжен датчиками 6 и 7 точного останова, лине кой 8, элементами памяти 9,10 и задержки 11,12, схемами И 13, , схемами ИЛИ 16, 17,18,схемами ИЛИНЕ 19 и 20. Первый выход 21 блока 2 соединен со входами 22 и 23 элементов 9 и 1О. Выход схемы 19 через элемент 11 со&динЬн со входами 24, 25 26 схем 13, 14,15, вы}сод схемы 13 через второй элемент задержки 12 соединен с блоком 2, Е торой выход 27 которого подключен ко вторым входам 28 и 29 9 и 10, второму входу 30 схемь 19 и входу 31 второй схемы ЛЛИ 17, второй вход 32 которой связан с выходом 33 второй схемы И 14. Датчик 6 соединен с входами 34 и 35. третьей схемы ИЛИ 18, второй схемы ИЛИ-НЕ 20 .и с третьими входами 36 и 37 элементов 9 и 1О, выходы 38 и 39 которых подключены соответственн ко вторым входам-40 и 41 третьей и второй схем И 14 и 15, а второй датчи 7 соединен со вторыми входами 42 и 43 третьей схемы 1ЛИ 18, второй схем ИЛИ-НЕ 2О и четвертыми входами 44 и 45 элементов 9 и 1О, Выход 46 второй схемы ИЛИ-НЕ 20 соединен с третьими входами 47 и 48 второй и третьей схем И 14 и 15, выхо 49 третьей схемы И 15 соединён со вторым входом 50 схемы ИЛИ 16, а выходы 51, 52 первой и второй схем И 16 и 17 соединены с блоком 4. Входы 53,и 54 схем 16 и 19 соединены с вы ходом 21 блока 2. Датшки 6 и 7 могут быть выполнены в. виде вы.ключателей 55 и 56, установ венных на кране 57, Линейка 8 блока 5 расположена на подкрановом пути симметрично поперечной оси основной линейки 58. Устройство работает следующим обра зом. Работу устройства рассмотрим на примере механизма передвижения крана 57. В исходном состоянии он выключен и находится на некоторой позиции в зоне точиного останова. Это значит, что команды на выходе блока 2 отсутствуют и возбуждены датчики 6 и 7 точного останова. Может быть возбужден только один датчик 6 лли 7, что также соответствует нахождению крана в зоне точного останова, так как в обоих случаях на входе схемы ИДИ-НЕ 20 будет единичный сигнал, а на выходе - нулевой, который поступает на входы 47 и 48 схем И 14,15 и далее на входы 32,50 схем ИЛИ 16 и 17. На другие входы 53,31 схем ИЛИ 16,17 нулевой сигнал поступает от блока 2 программы, поэтому в исходном состоянии команды на выходе отсутствуют, независимо от сосгтояния элементов памяти 9,10. С выхода схемы ИЛИ 18 единичный сигнал поступает на вход схемьг И 13, на другом входе 4 которой имеется такой же сигнал с выхода элемента задержки 11, далее на вход элемента задержки 12 сигнал поступает на вход блока 2 программы. Следовательно, в исходном состоянии блок 5 точного останова выдает блоку 2 программы разрешение на пуск. По команде пуск , подаваемой с пульта 1 управления крановщиком, блок 2 программы выдает команды на включение двигателей механизмов передвижения крана и грузовой тележки для движения в соответствующих направлениях с целью доставить грузозахватный орган к месту взятия груза. Предположим, что с выхода 21 поступила команда на перемещение крана 57 вправо, вследствие чего единичный сигнал поступит на вход 53 схемы ИЛИ 16 и далее на вход блока 4 включения двигателей механизмов крана, вход 54 схемы ИЛИ-НЕ 19, вхор 22 для установки в состояние 1 элемента памяти 9, вход 23 для установки в состояние О элемента 10 памяти. Двигатель механизма передвижения крана запускается и кран ,57 начинает перемещаться вправо. На выходе схемы ИЛИ-НЕ 19 появляется нулевой сигнал, который через элемент задержки 11 передаегся на входы 24,25,26 схем И 13 14,15, Передача осуществляется без временной задержки. С выхода схемы И 13 нулевой сигнал череоз элемент 12 за держки поступает на вход блока 2 пропраммы, чем снимается разрешение на переход последнего в следующее состояние Элемент памяти 9 переходит в состояние , если до этого он был в состоянии О, а элемент памяти 1О - в состояние О, если до этого он был в состоянии 1, так как к этому моменту датчика 6,7 точного останова сходят с линейки 8.
При движении к заданной позиции кран будет проходить позиции, на кото рых он не должен останавливаться, так ) как их номера больше или меньше заданного. При наезде на линейки 8 зон точного останова этих позиций будут возбуждаться датчики точного останова 6 и 7, но это не приведет к изменению состояния Выходов 51,52, потому что на входах 24, 25, 26 схем И 13,14, 15 будет нулевой сигнал, поступающий с выхода элемента задерл ;ки 13;.
При достижении краном 57 заданной позиции ;по сигналу датчика 3 положения начинается торможение и блок программы 2 снимает команду вправо. На выходах 21,51 устанавливается нулевой сигнал. Он будет инвертирован схемой ИЛИ-НЕ 19 и поступит на вход элемента задержки 11, который начнет о тработку временной задержки, равной времени торможения. При входе крана в зону точного останова на линейку 8 надвинется датчик 6 точного останова. Ш возбудится и выдаст единичный сигнал на входы 36,37 элементов памяти 9, 10, схемы ИЛИ-НЕ 2О и схемы ИЛИ 18. С выхода 46 схемы ИЛИ-НЕ 2О нулевой сигнал поступит на входы 47, 48 схем И 14, 15 и блокирует тем самым прохождение единичных сигналов с выходов 38, 39 элементов памяти 9, 1О. С выхода схемы ИЛИ 18 единичный сигнал поступит на вход схемы И 13. На другой вход 24 этой схемы аналогич 1ый сигнал поступит через некоторое время с выхода элемента задержки 11. С выхода схемы И 13 сигнал поступит на вход элемента задержки 12 и далее на вход блока 2 программы.
В процессе торможения крана 57 вслед за датчиком 6 на линейку 8 може надвинуться еще и датчик 7, и только тогда кран 57 остановится. Может также быть, что кран остановится, переместившись еще немного вправо, так, чтчз отпустит датчик 6, а возбужде1Гным останется лишь датчик 7. Именно такое
состояние датчиков изображено на фиг. 2. Но во всех трех случаях кран находится в зоне точного останова, т.е. ос-, тановился с допустимой ошибкой, при которой обеспечивается автоматическое
выполнение следующей операции цикла, например, захват груза. Поэтому узел точного останова выдаст разрешение на выполнение следующей i операции цикла. Так,происходит работа устройства при нормальных условиях эксплуатации, когда механизм в результате торможения останавливается в зоне точного останова. Но в зависимости от сложившихся условий, он может не дойти до нее (например, при сильном встречном ветре) или перейти (например, при сильном попутном ветре}.
В первом случае датчик 6 не сработает и на входах 35, 43 схемы ИЛИ-НЕ 20 будут нулевые сигналы. С еб выхода единичный сигнал поступает на входы 47,
48 схем И 14, 15, чем снимается бло-. К1фовка прохождения сигналов с выходов ,38, 39 элементов памяти 9,10. Первый из них будет к этому времени в состояНИИ I, второй - в состо шии О, т.е. они запомнили состояния, в которые patiee перевела юс команда вправо. С выхода 38 элемента памяти 9 единичный сигнал поступает на вход .40 схемы И 15. На вход 26 этой схемы аналогичный сигнал поступит с выхода элемента задержки 11, как только истечет время торможения. Тогда схема И 15 выдаст единичный сигнал на вход 50 схемы ИЛИ 16 и далее на выход 51. Следовательно, на вход блока 4 включения двигателей механизмов крана вновь будет подана
команда вправо. Кран вновь начнет перемещаться в прежнем направлении. При надвгп ании датчика на линейку 8, т.е. при входе механизма в зону точного останова, команда будет снята, так как
единичный сигнал с выхода датчика 6 бу дет инвертирован схемой ИЛИ-НЕ 2О, которая- выдаст нулевой сигнал на вход 48 схемыИ 15. Одновременно единичным сигналом с выхода схемы ИЛИ 18 через
схему И 13 будет запущен элемент задержки 12. Время его задержки равно времени торможения после срабатывания датчика 6 точного останова. Если за это время кран не уйдет из зоны точного останова, то блоку 2 программы., будег выдано разрешение на вьшолнение следук щей операции цикла. Если же во время отработки задержки кран уйдет из зоны точного останова, то отработка задержки будет прекращена, так как отпустят датчики точного останова и на входе элемента задержки 12 появится нулевой сигнал. Ввод крана в зону точного останова повторится.
Автоматическое выполнение (Останова крана в заданных позициях с необходимо точностью позволяет автоматизировать Бьтолнение всех операций цикла работы крана.
Формула изобретений
Устройство управления группой кранов, содержащее пульт управления, соединенный с блоком программы, который связан с датчиками положения механизмов кранов и блоком включения двигат&лей механизмов кранов, а также бло.ки точного останова, отличающееся тем, что, с целью повыщения качества управления, каждый блок точного останова снабжен датчиками точного останова, линейкой, элементами памяти и .задержки, схемами И,ИЛИ, ИЛИ-НЕ, причем первый выход блока программы соединен со входами элементов памяти.
схемы ИЛИ и схемы ИЛИ-НЕ, выход которой через элемент задержки соединен со входами схем И, выход схемы И через второй элемент задержки соединен с блоком программы, второй выход которого подключен ко вторым входам элементов памяти, второму входу схемы ИЛИ-ИЁ и входу второй схемы ИЛИ,второй вход которой связан с выходом второй схемы И, при этом датчик точного останова соединен со входами третьей схемы ИЛИ, второй схемы ИЛИ-НЕ и с третьими входами элементов памяти, выходы которых подключены соответственно i ко вторым входам третьей и второй схем И, а второй датчик точного останова соединен со вторыми ВХОДЕКЦ1 третьей схемы ИЛИ, второй схемы И71И-НЕ и четвертыми входами элементов памяти, причем выход второй схемы ИЛИ-НЕ соединен с третьими входами второй и третьей схем И, выход третьей схемы И соединен со вторым Входом схемы ИЛИ, а выходы первой и второй схем ИЛИ соединены с блоком включения двигателей механизмов крана.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 531783, кл. G 05 В 19/00, З.О4,74,
2.Авторское свидетельство СССР
:№352а25,1Ш.,Вб6С 13/18, 29.12.70 (прототип.
1
vy
S6
JL
J.
51
/
a) @


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1975 |
|
SU648949A1 |
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Устройство управления движением транспортного средства | 1990 |
|
SU1837328A1 |
| Устройство программного управления передвижением подвижного объекта | 1972 |
|
SU474480A1 |
| Устройство для программного управления подъемно-транспортным механизмом | 1982 |
|
SU1048456A1 |
| Программное временное устройство | 1987 |
|
SU1418654A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1991 |
|
RU2042169C1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| СИСТЕМА ДЛЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2238197C1 |
y///////,
/,
////
в
й/г.5
П...
