Изобретение относится к области машиностроения, а именно, к механизмам для передачи вращательно-качательного движения от одного вала к другому, и может быть применено во всех отраслях народного хозяйства, где требуется большая зона ка- чательного движения от 0° до П.
Цель изобретения - расширение кинематических возможностей.
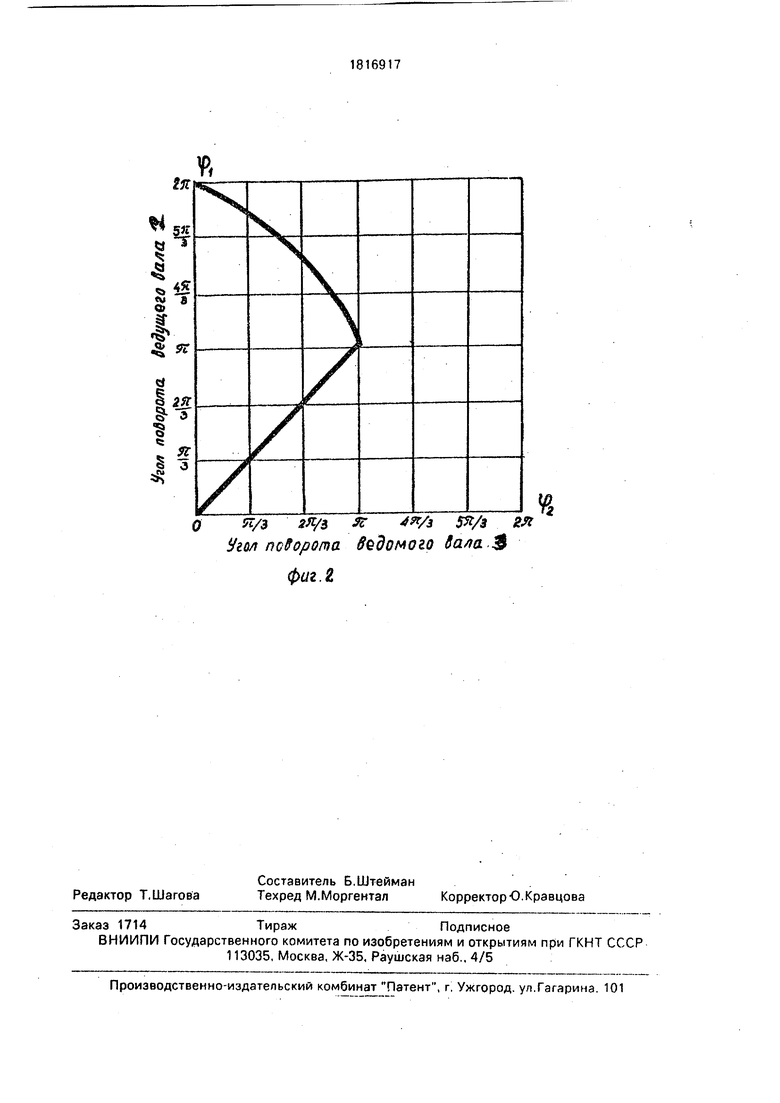
На фиг. 1 изображен механизм двойного шарнирного параллелограмма, общий вид; на фиг. 2 - график зависимости угла поворота ведущего вала от угла поворота ведомого вала.
Механизм двойного шарнирного параллелограмма содержит стойку 1, на которой установлены ведущий 2 и ведомый 3 валы. На соответствующих валах жёстко закреплены кривошипы 4, 5 и 6, 7. Ведущий 2 и ведомый 3 валы вместе с соответствующими кривошипами 4, 5 и 6, 7 имеют форму одинаковых коленчатых валов. Шатун 8 выполнен жестким и шарнирно связан своими концами с шейкой 5 ведущего коленчатого вала 2 и с шейкой 7 ведомого коленчатого вала 3. Шатун 9 выполнен регулируемой длины и шарнирно связан своими концами с шейкой 4 ведущего коленчатого вала 3 и с шейкой б ведомого коленчатого вала 3. На стойке 1 установлен упругий элемент 10, предназначенный для взаимодействия с ведомым коленчатым валом 3.
Механизм двойного шарнирного параллелограмма работает следующим образом.
При вращении ведущего вала 2 жестко закрепленные с ним кривошипы 4 и 5 приводят в движение жесткий шатун 8 и шатун 9, выполненный регулируемой длины, С шатунов 8 и 9 движение передается на шарнирно соединенные с ними кривошипы 6 и 7, которые в свою очередь передают вращательное движение на ведомый вал 3, т. к. они жестко сларены, В исходном положении оба вала 2 и 3 будут вращаться в одном
0
5
0
5
0
5
0
5
направлении и при повороте от 0 до П, при достижении «е определенного положения, ведомый вал 3 переходит в антипараллелограмм, т. е. начинает вращательное Движение в обратную сторону до первоначального исходного положения, Обратное вращение ведомого вала 3 достигается при оперативном взаимодействии с упругим элементом 10, установленным на стойке 1. Причем упругий элемент 10 устанавливается по направлению вращения ведомого вала 3. Как видно из фиг. 2 по оси р угол поворота ведущего вала 2, вал вращается в одном направлении от 0 до 2П, а по оси pi угол поворота ведомого вала 3, вал вращается в том же направлении, затем от П до 0 - в обратном направлении. Таким образом, механизм двойного шарнирного параллелограмма работает как кривошипно-коро- мысловый механизм, в пределе от 0 до П. Формула изобретения Механизм двойного шарнирного параллелограмма, содержащий стойку, установленные на ней ведущий и ведомый валы, кривошипы, жестко закрепленные на соответствующих валах, и шарнирно связанные своими концами с соответствующими кривошипами два шатуна, один из которых жесткий, отличающийся тем, что, с целью расширения кинематических возможностей, ведущий и ведомый валы вместе с соответствующими кривошипами имеют форму одинаковых коленчатых валов, другой шатун выполнен регулируемой длины, одна из шеек ведущего коленчатого вала связана с соответствующей шейкой ведомого коленчатого вала посредством первого шатуна, другая шейка ведущего коленчатого вала связана с соответствующей шейкой ведомого коленчатого вала посредством второго шатуна, а механизм снабжен упругим элементом, установленным на стойке и предназначенным для взаимодействия с ведомым коленчатым валом.
О я/з гя/з Я /з 5Я/з № Уш пв&орота ведомою Sa/ia &
фиг.1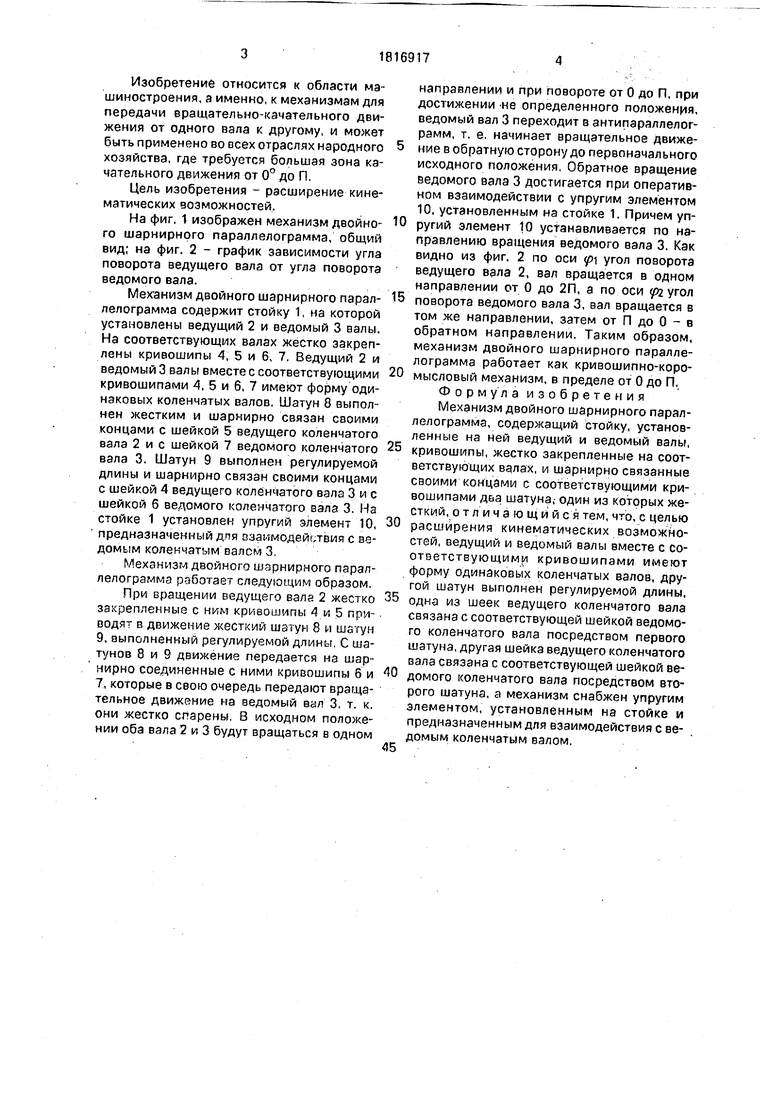
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| ШАРНИРНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ | 2020 |
|
RU2740526C1 |
| Оппозитный кривошипно-шатунный механизм | 2023 |
|
RU2820580C1 |
| ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО | 2003 |
|
RU2247273C2 |
| Шарнирно-рычажный механизм | 1980 |
|
SU868199A1 |
| ПРИВОД РАСПРЕДЕЛИТЕЛЬНОГО ВАЛА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2495261C2 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО | 2003 |
|
RU2246056C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| Пространственный регулируемый рычажный механизм | 1986 |
|
SU1315696A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2020 |
|
RU2750997C1 |
Изобретение относится к машиностроению, а именно к механизмам для передачи вращательно-качательного движения. Цель изобретения - расширение кинематических возможностей. Ведущий 2 и ведомый 3 валы имеют форму одинаковых коленчатых валов. Шатун 8 выполнен жестким и шарнирно связан концами с шейкой 5 ведущего коленчатого вала 2 и шейкой 7 ведомого коленчатого вала 3. Шатун 9 выполнен регулируемой длины и шарнирно связан концами с шейкой 4 вала 2 и шейкой 6 вала 3. Упругий элемент 10 установлен на стойке 1 и предназначен для взаимодействия с валом 3. Вращение от ведущего вала 2 передается на ведомый вал 3 посредством шатунов 8 и 9.2 ил.
| Артоболевский И | |||
| И | |||
| Механизмы в современной технике | |||
| М.: Наука | |||
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
| с | |||
| Ветроэлектрическая силовая установка | 1921 |
|
SU378A1 |
| МАШИНА ДЛЯ ИЗМЕЛЬЧЕНИЯ РЫХЛОЙ МАССЫ | 1923 |
|
SU628A1 |
| Артоболевский И | |||
| И | |||
| Механизмы в современной технике, М., Наука, 1970, т | |||
| I, с | |||
| Дальномер | 1922 |
|
SU379A1 |
| МАШИНА ДЛЯ ПЕРЕРАБОТКИ ТОРФЯНОЙ МАССЫ | 1923 |
|
SU629A1 |
